
一种具有自主焊接功能的焊接装置.pdf

雨巷****彦峰


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种具有自主焊接功能的焊接装置.pdf
本发明公开了一种具有自主焊接功能的焊接装置,包括普通焊接装置和安装在焊接装置上的目标识别装置,识别装置包括建模模块、分段模块、合并模块和滤波模块。本发明通过在焊接装置上加装目标识别装置,能够有效增强焊接装置的焊接能力,提高焊接效率,焊接装置能够对焊接物进行轮廓识别,识别过程中能有效滤除目标轮廓噪声,从而实现目标定位和形状判别,为准确定点焊接打下基础。
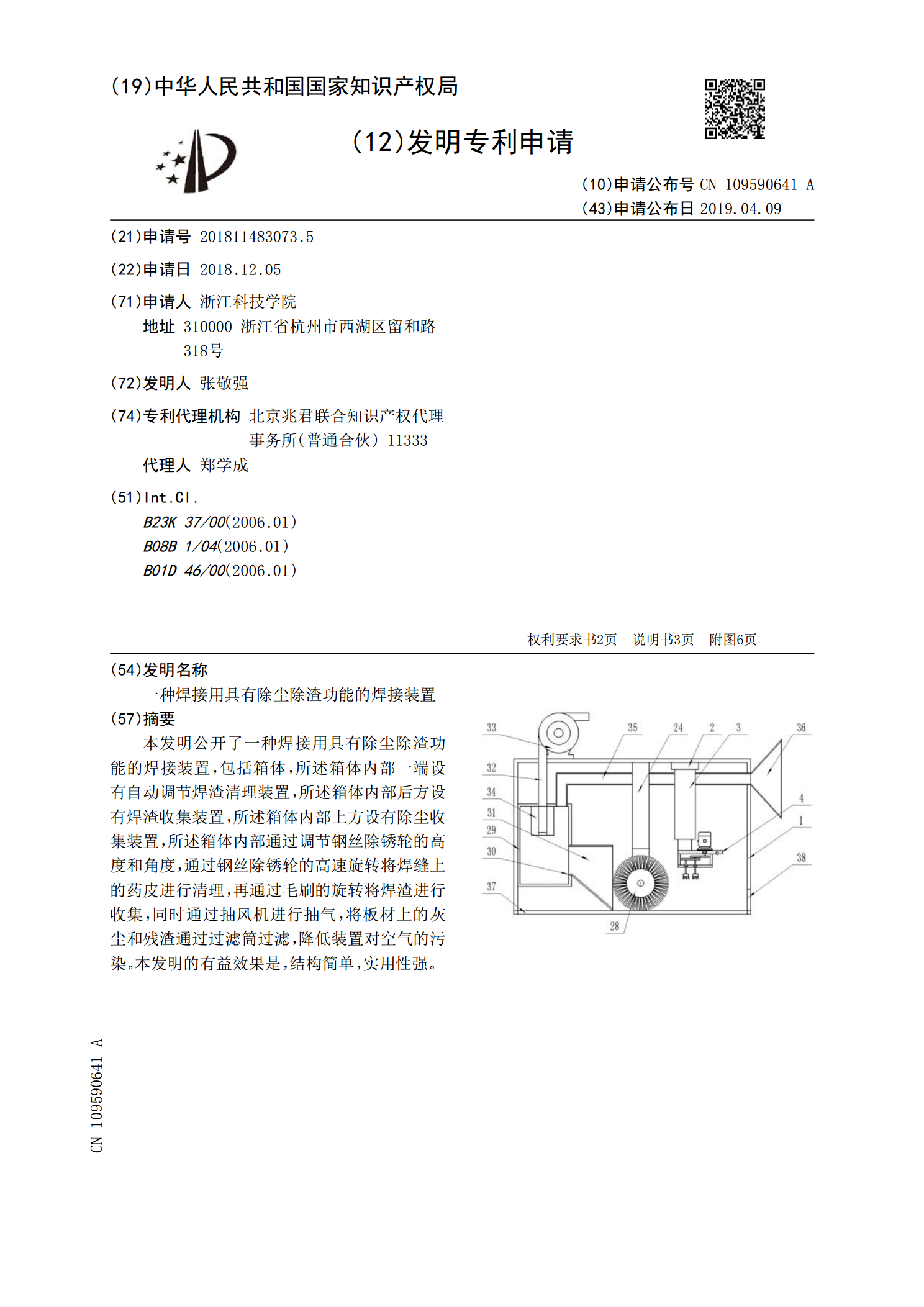
一种焊接用具有除尘除渣功能的焊接装置.pdf
本发明公开了一种焊接用具有除尘除渣功能的焊接装置,包括箱体,所述箱体内部一端设有自动调节焊渣清理装置,所述箱体内部后方设有焊渣收集装置,所述箱体内部上方设有除尘收集装置,所述箱体内部通过调节钢丝除锈轮的高度和角度,通过钢丝除锈轮的高速旋转将焊缝上的药皮进行清理,再通过毛刷的旋转将焊渣进行收集,同时通过抽风机进行抽气,将板材上的灰尘和残渣通过过滤筒过滤,降低装置对空气的污染。本发明的有益效果是,结构简单,实用性强。

一种具有敲击检验功能的焊接装置.pdf
本发明公开了一种具有敲击检验功能的焊接装置,涉及焊接技术领域,其包括固定块,所述固定块上侧面左右两端均固定连接有电动推杆,两个所述电动推杆的另一端固定连接在支撑架下侧面上。该具有敲击检验功能的焊接装置,通过限位架、滚轮、控制器、电动推杆、支撑架以及装置主体对焊接板材进行定位焊接,在焊接结束可以通过控制器、鼓风机以及环形吹管对焊接板材上表面进行吹拂,同时通过、双轴电机、支撑轴、半齿轮、齿轮、连接轴、盘卷盘、拉动绳、敲击锤、滑动块、弹簧、伸缩杆以及滑动槽对焊接板材进行敲击检验,进而解决了现今大多数的焊接装置不
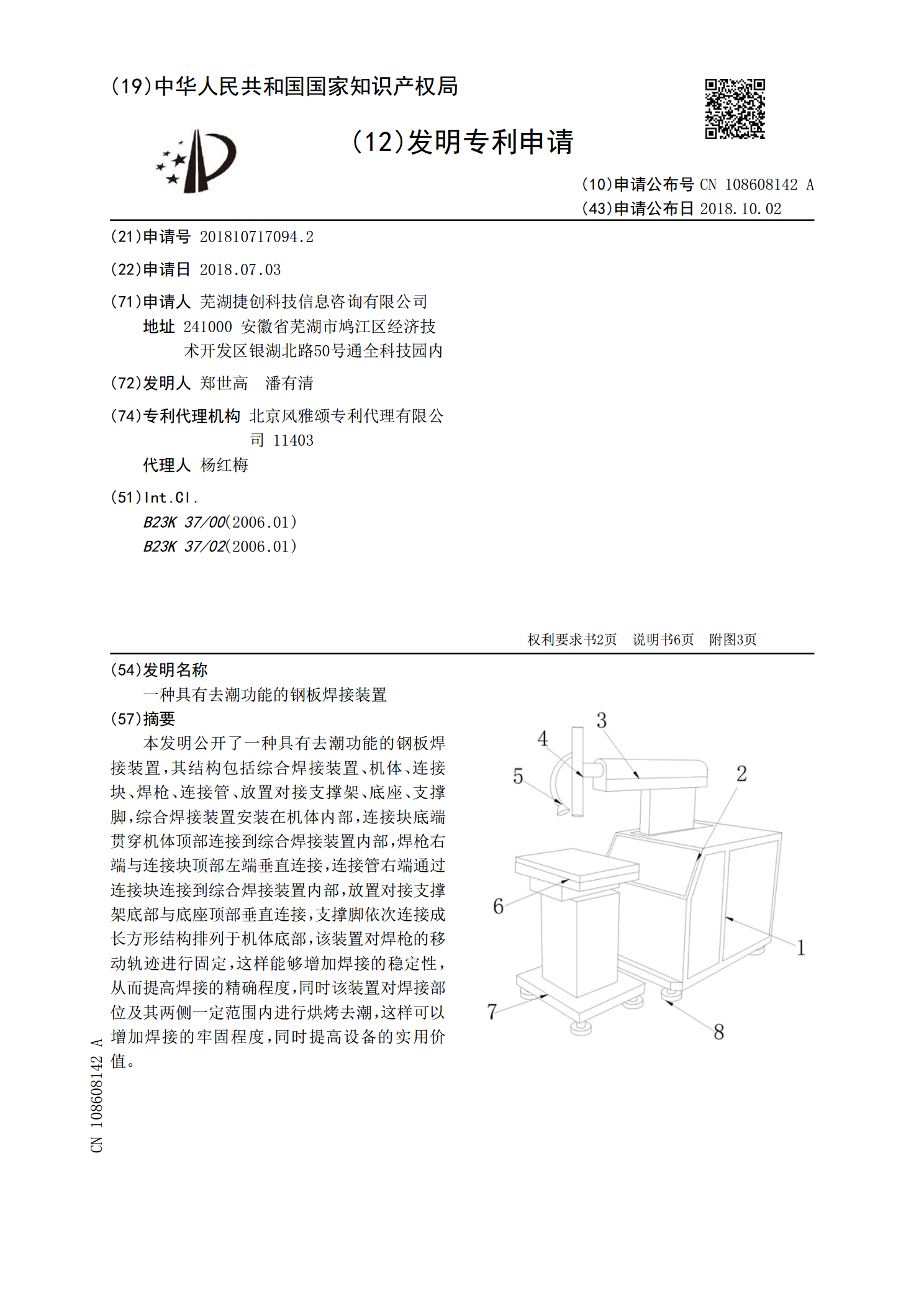
一种具有去潮功能的钢板焊接装置.pdf
本发明公开了一种具有去潮功能的钢板焊接装置,其结构包括综合焊接装置、机体、连接块、焊枪、连接管、放置对接支撑架、底座、支撑脚,综合焊接装置安装在机体内部,连接块底端贯穿机体顶部连接到综合焊接装置内部,焊枪右端与连接块顶部左端垂直连接,连接管右端通过连接块连接到综合焊接装置内部,放置对接支撑架底部与底座顶部垂直连接,支撑脚依次连接成长方形结构排列于机体底部,该装置对焊枪的移动轨迹进行固定,这样能够增加焊接的稳定性,从而提高焊接的精确程度,同时该装置对焊接部位及其两侧一定范围内进行烘烤去潮,这样可以增加焊接的
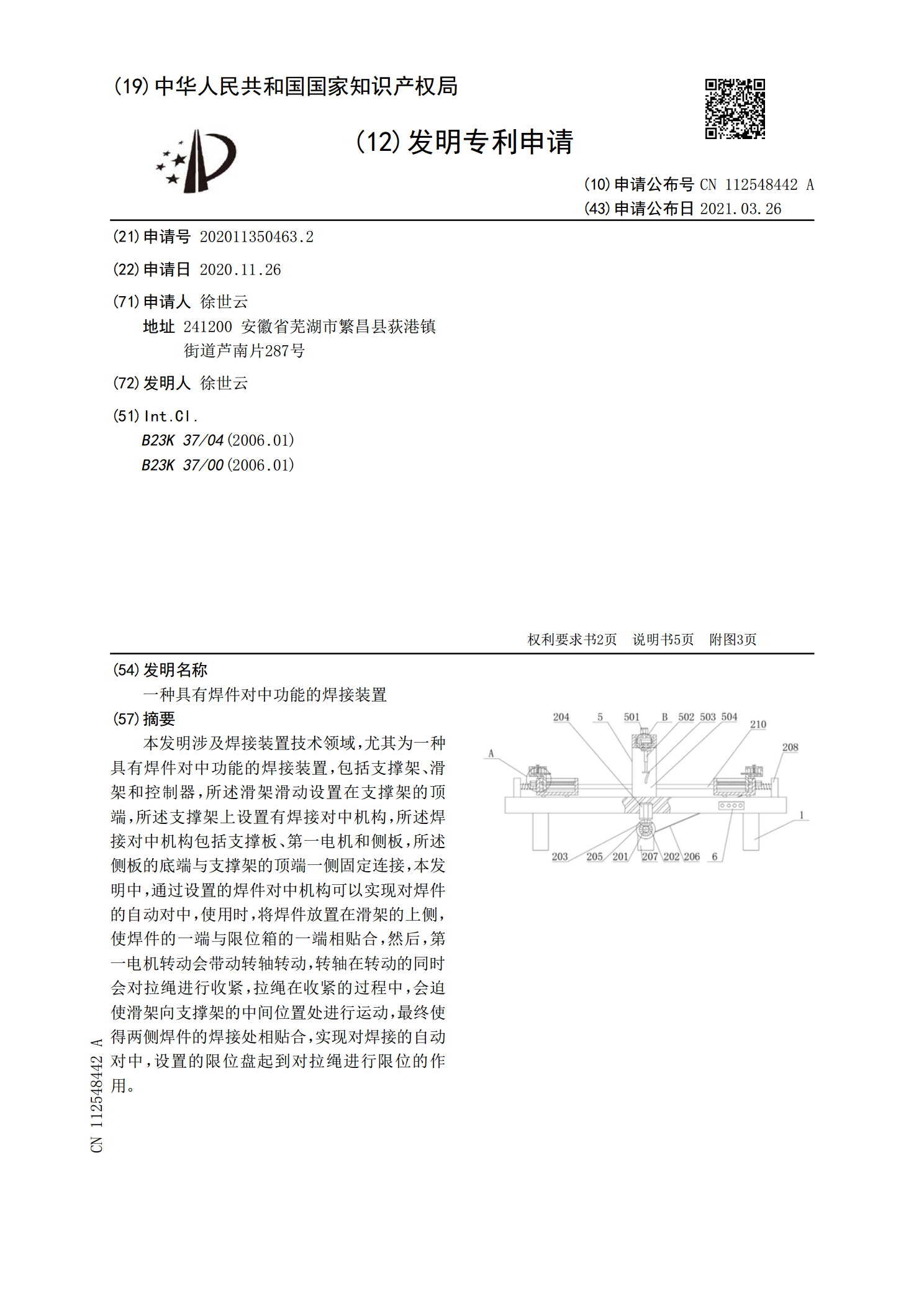
一种具有焊件对中功能的焊接装置.pdf
本发明涉及焊接装置技术领域,尤其为一种具有焊件对中功能的焊接装置,包括支撑架、滑架和控制器,所述滑架滑动设置在支撑架的顶端,所述支撑架上设置有焊接对中机构,所述焊接对中机构包括支撑板、第一电机和侧板,所述侧板的底端与支撑架的顶端一侧固定连接,本发明中,通过设置的焊件对中机构可以实现对焊件的自动对中,使用时,将焊件放置在滑架的上侧,使焊件的一端与限位箱的一端相贴合,然后,第一电机转动会带动转轴转动,转轴在转动的同时会对拉绳进行收紧,拉绳在收紧的过程中,会迫使滑架向支撑架的中间位置处进行运动,最终使得两侧焊件