
一种无相对滑动的螺旋圆弧锥齿轮机构.pdf

猫巷****永安


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种无相对滑动的螺旋圆弧锥齿轮机构.pdf
本发明涉及一种无相对滑动的螺旋圆弧锥齿轮机构,包括小轮和大轮组成的一对传动副,小轮和大轮的轴线正交,小轮圆锥体外表面均布有螺旋圆弧齿,大轮圆锥体外表面均布有螺旋圆弧槽,螺旋圆弧槽和螺旋圆弧齿的中心线均为圆锥螺旋线,螺旋圆弧齿和螺旋圆弧槽配合;安装小轮和大动轮时使其中一对螺旋圆弧齿和螺旋圆弧槽啮合,驱动器带动输入轴、小轮和大轮旋转,实现正交轴间的传动。螺旋圆弧齿和螺旋圆弧槽的形状由传动比等参数确定。本发明中螺旋圆弧锥齿轮传动时齿面无相对滑动,因而无齿面胶合、磨损和塑性变形等失效形式,具有单级传动比大,重合度
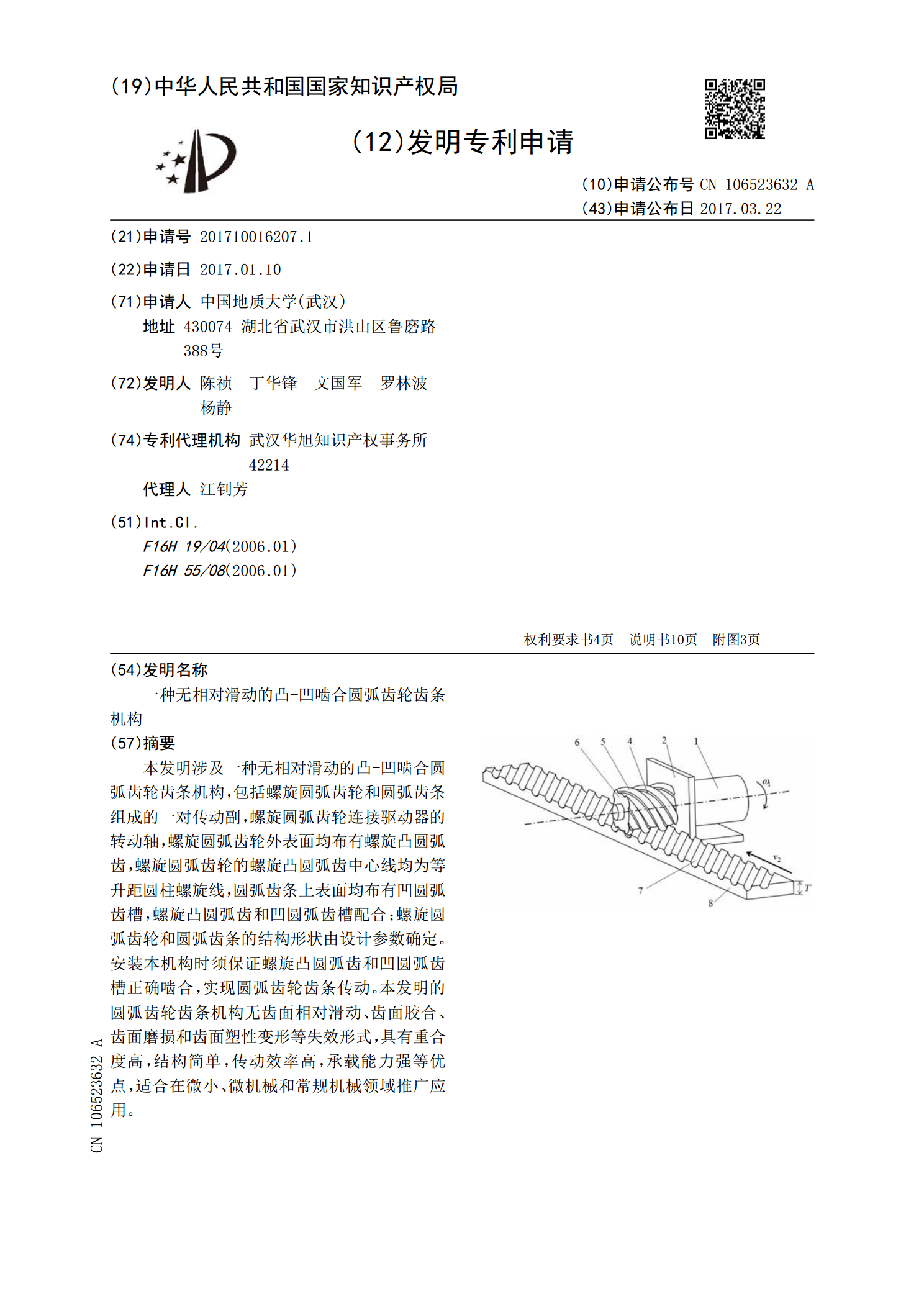
一种无相对滑动的凸‑凹啮合圆弧齿轮齿条机构.pdf
本发明涉及一种无相对滑动的凸‑凹啮合圆弧齿轮齿条机构,包括螺旋圆弧齿轮和圆弧齿条组成的一对传动副,螺旋圆弧齿轮连接驱动器的转动轴,螺旋圆弧齿轮外表面均布有螺旋凸圆弧齿,螺旋圆弧齿轮的螺旋凸圆弧齿中心线均为等升距圆柱螺旋线,圆弧齿条上表面均布有凹圆弧齿槽,螺旋凸圆弧齿和凹圆弧齿槽配合;螺旋圆弧齿轮和圆弧齿条的结构形状由设计参数确定。安装本机构时须保证螺旋凸圆弧齿和凹圆弧齿槽正确啮合,实现圆弧齿轮齿条传动。本发明的圆弧齿轮齿条机构无齿面相对滑动、齿面胶合、齿面磨损和齿面塑性变形等失效形式,具有重合度高,结构简
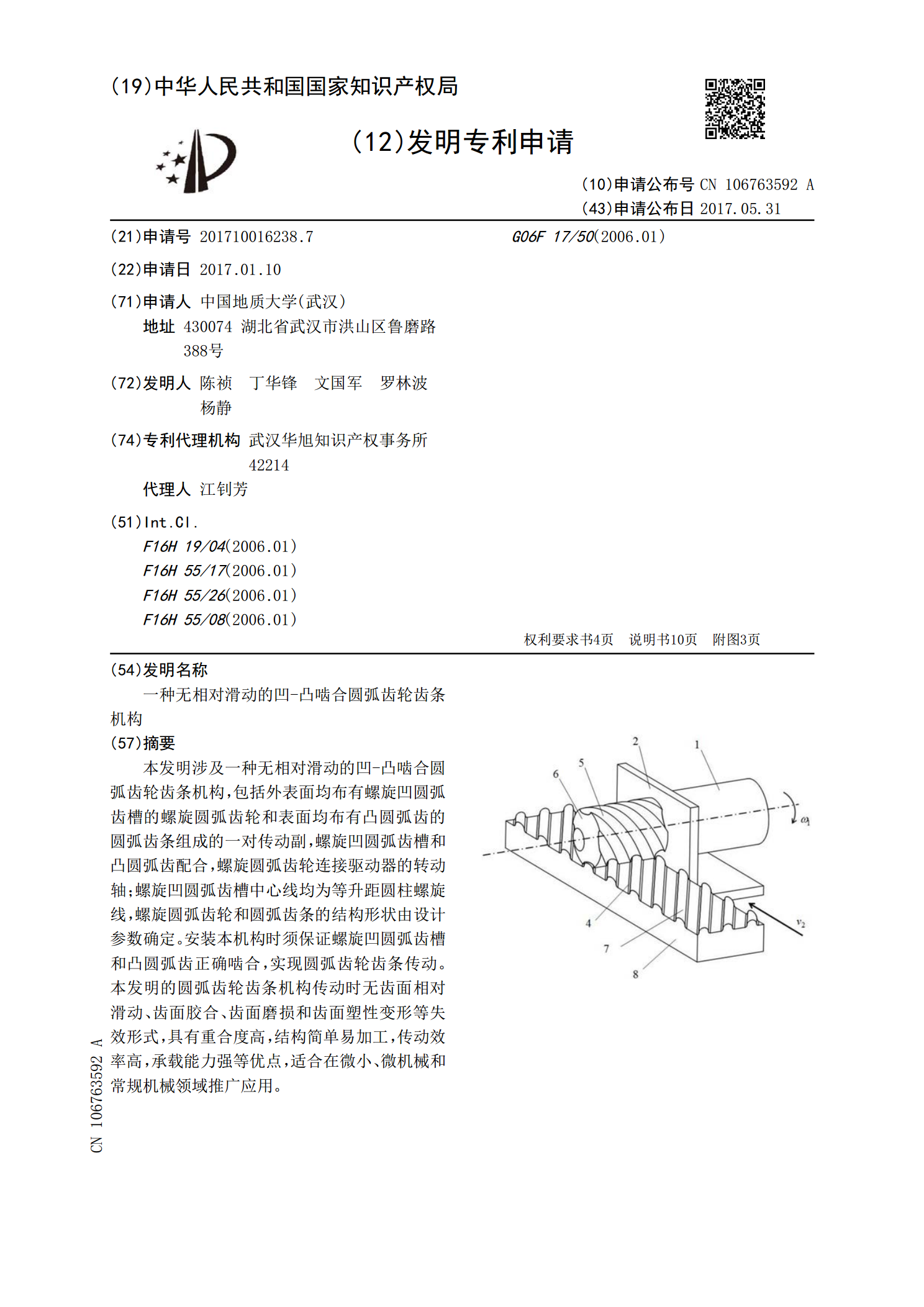
一种无相对滑动的凹‑凸啮合圆弧齿轮齿条机构.pdf
本发明涉及一种无相对滑动的凹‑凸啮合圆弧齿轮齿条机构,包括外表面均布有螺旋凹圆弧齿槽的螺旋圆弧齿轮和表面均布有凸圆弧齿的圆弧齿条组成的一对传动副,螺旋凹圆弧齿槽和凸圆弧齿配合,螺旋圆弧齿轮连接驱动器的转动轴;螺旋凹圆弧齿槽中心线均为等升距圆柱螺旋线,螺旋圆弧齿轮和圆弧齿条的结构形状由设计参数确定。安装本机构时须保证螺旋凹圆弧齿槽和凸圆弧齿正确啮合,实现圆弧齿轮齿条传动。本发明的圆弧齿轮齿条机构传动时无齿面相对滑动、齿面胶合、齿面磨损和齿面塑性变形等失效形式,具有重合度高,结构简单易加工,传动效率高,承载能

基于摆线的螺旋锥齿轮齿根过渡圆弧研究.docx
基于摆线的螺旋锥齿轮齿根过渡圆弧研究摆线螺旋锥齿轮是一种重要的机械传动元件,在各种机械设备和机械传动系统中广泛应用。它的主要特点是适用于高速和高载荷传动,体积小、重量轻、传动效率高、噪音低、运行平稳等。由于其具有诸多优点,摆线螺旋锥齿轮已成为各行各业中的重要组成部分。然而,在摆线螺旋锥齿轮的设计和制造过程中,齿根过渡圆弧的设计和制造一直以来都是一个难点问题。在实际应用中,齿根过渡圆弧的形状和尺寸直接影响着摆线螺旋锥齿轮的传动性能和寿命。因此,研究基于摆线的螺旋锥齿轮齿根过渡圆弧的设计和制造技术,具有十分重

一种圆弧螺旋齿轮副.pdf
本发明涉及空间垂直交错齿轮传动领域,尤其涉及一种圆弧螺旋齿轮副,包括齿轮一和齿轮二,齿轮一与齿轮二的中心轴相互空间垂直,其特征在于,所述齿轮一与齿轮二上通过中心轴的轴向剖面与蜗轮的轴向剖面类似,均为中部凹下形式,齿轮一与齿轮二的法面模数相等、端面模数则随自身螺旋角变化而变化,但一对齿轮副的螺旋角之和为90°,所述齿轮一的轴向剖面在沿齿宽方向的各个截面上的齿顶圆、节圆、齿根圆分别与齿轮二横剖面的圆弧形几何尺寸匹配。与现有技术相比,本发明的有益效果是:是空间螺旋线接触啮合,消除了传动中不正常啮合所发生的干涉和