
履带起重机变幅机构动态特性研究的开题报告.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

履带起重机变幅机构动态特性研究的开题报告.docx
履带起重机变幅机构动态特性研究的开题报告一、选题背景及意义履带起重机是建筑施工、港口物流以及矿山等领域中常用的起重设备。它具有安全可靠、移动方便、载重能力大等优点,适用于不同环境条件下的各种起重任务。其中变幅机构是履带起重机的重要组成部分,负责提供吊臂在垂直方向和水平方向上的运动能力,并为起重过程中的各种工作提供支持和保障。目前,国内外对履带起重机的变幅机构动态特性研究较为薄弱,特别是在大风、重载、非均匀土层、复杂地形等复杂工况下的控制和安全性能方面还存在不足。因此,本研究旨在对履带起重机变幅机构的动态特

锚杆钻机变幅机构运动学及动态特性的研究与优化的开题报告.docx
锚杆钻机变幅机构运动学及动态特性的研究与优化的开题报告一、研究背景和意义随着城市化进程的加速,基础设施建设也不断推进。在建筑、市政、交通等领域,大量需要钢结构支撑的项目也在不断增加。而锚杆钻机的作用就是在钢结构中预埋锚杆,以增强钢结构的结构性能,提高建筑物的抗震性和承载能力。因此,锚杆钻机在基础设施建设中扮演着重要的角色。锚杆钻机是一种大型施工机械,其变幅机构是控制钻机工作范围和稳定性的重要部件。因此,对锚杆钻机变幅机构运动学和动态特性的研究与优化,可以提高钻机的工作效率和稳定性,减少钻机故障率,从而提高
一种履带起重机变幅副臂支架及履带起重机.pdf
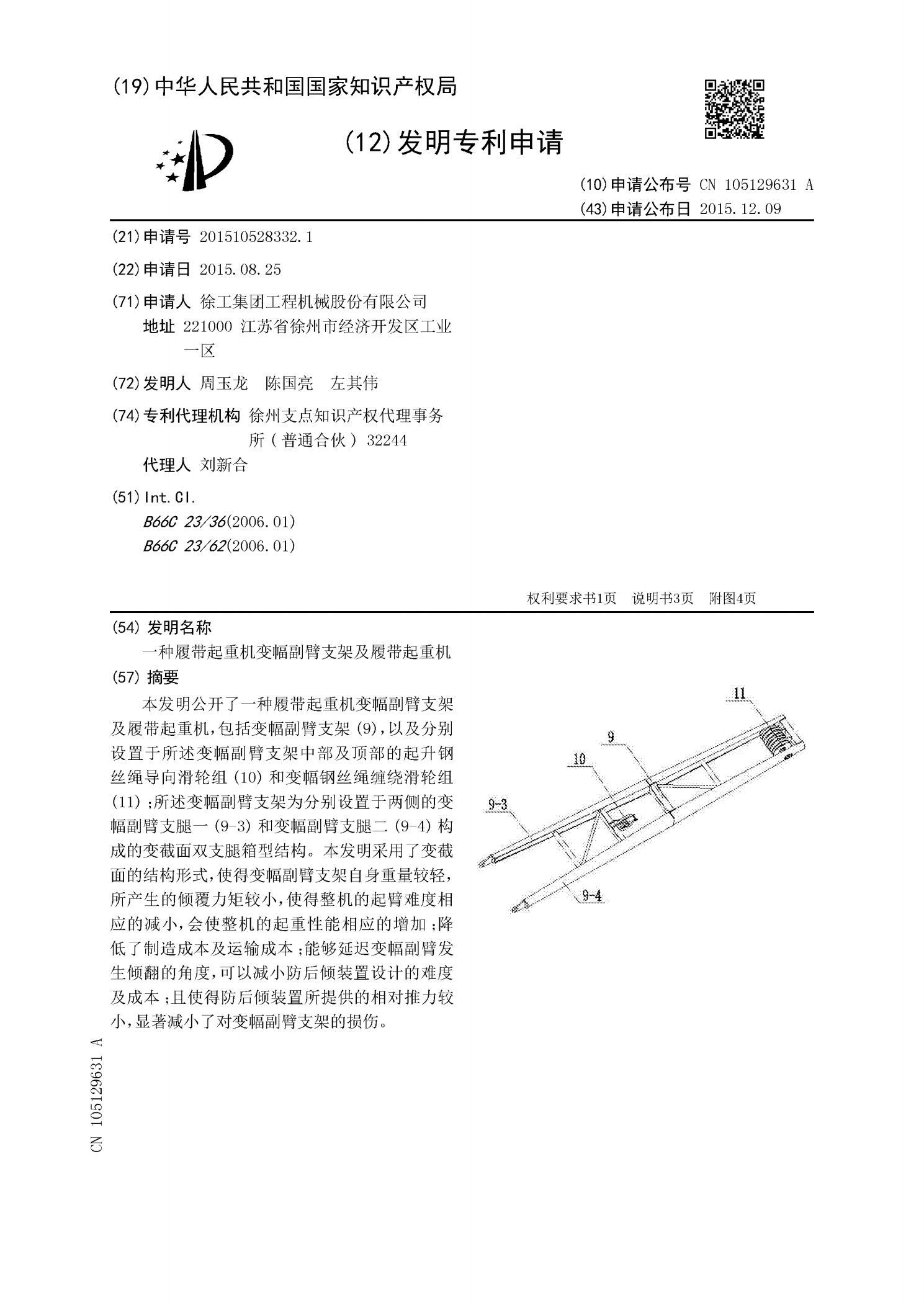
本发明公开了一种履带起重机变幅副臂支架及履带起重机,包括变幅副臂支架(9),以及分别设置于所述变幅副臂支架中部及顶部的起升钢丝绳导向滑轮组(10)和变幅钢丝绳缠绕滑轮组(11);所述变幅副臂支架为分别设置于两侧的变幅副臂支腿一(9-3)和变幅副臂支腿二(9-4)构成的变截面双支腿箱型结构。本发明采用了变截面的结构形式,使得变幅副臂支架自身重量较轻,所产生的倾覆力矩较小,使得整机的起臂难度相应的减小,会使整机的起重性能相应的增加;降低了制造成本及运输成本;能够延迟变幅副臂发生倾翻的角度,可以减小防后倾装置设

齿条式门座起重机变幅机构.pdf
本发明涉及一种齿条式门座起重机变幅机构,其特征在于它包括基座(31)、压轮(32)、摆动架(33)、齿条(34)和驱动装置,所述摆动架(33)固定于基座(31)上,所述压轮(32)均匀分布于摆动架(33)上;所述驱动装置包括依次连接的电动机(41)、浮动轴(42)、制动器(43)、减速器(44)、联轴器(45)和齿轮(46),所述齿轮(46)与齿条(34)相互啮合。本发明齿条式门座起重机变幅机构,能够在单臂架门座起重机工作性变幅时提供更高精度、更安全的变幅动作。提高了该类门座起重机在使用过程中的工作效率及

扣件胶垫动态幅频变特性对高速轮轨动力响应的影响研究的开题报告.docx
扣件胶垫动态幅频变特性对高速轮轨动力响应的影响研究的开题报告一、研究背景与意义随着高铁网络的不断建设和完善,高铁作为快速、安全、舒适的交通方式受到越来越多的人们的青睐。然而,高速列车在运行过程中会产生强烈的振动和噪声,对车辆及轨道的损伤和使用寿命造成影响。因此,为降低高速轮轨振动与噪声对列车系统的危害并提高运行效率和舒适性,对高速列车的运行过程进行研究具有重要意义。高速列车的振动与噪声源主要来自轮轨之间的相对运动,而轮轨之间相对运动受到轮轴和轮对制动器、牵引器等部件的影响。扣件胶垫作为轮对和轴箱的连接件,