
水下机器人焊缝跟踪控制系统研究的开题报告.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

水下机器人焊缝跟踪控制系统研究的开题报告.docx
水下机器人焊缝跟踪控制系统研究的开题报告开题报告一、选题背景和研究意义随着船舶、海洋油气钻探平台等海洋设施规模的不断扩大,对海洋工程的安全性和可靠性提出了更高的要求。而在海洋工程建设中,焊接是一项关键的工艺技术。传统上,焊接工艺需要在水下进行,但由于水下环境的复杂性和危险性,传统焊接工艺的质量和效率无法满足大型深海工程的需要。因此,针对这一挑战,水下机器人焊缝跟踪控制系统研究具有非常重要的意义。本研究旨在基于水下机器人技术,开发一种能够在水下环境中实现焊缝跟踪控制的系统。这种系统将克服传统焊接工艺存在的缺

机器人焊缝跟踪系统智能跟踪控制的开题报告.docx
机器人焊缝跟踪系统智能跟踪控制的开题报告机器人焊缝跟踪系统智能跟踪控制的开题报告一、研究背景在现代制造业中,焊接技术得到了广泛应用。而机器人焊接技术的使用已成为大部分企业的主流选择。然而,机器人焊接技术在尺寸、变形、变量等问题的处理上,仍存在很大的挑战。机器人应用于焊接工作时,焊接过程中因为受到热应力和收缩力的影响,会导致焊缝偏移、变形和不均匀等问题的出现。因此,如何实现对焊接过程中焊缝的较好控制,是焊接行业需要解决的问题。目前,已经涌现出很多针对人工焊接中焊缝跟踪控制的解决方案,包括视觉检测、位置控制等

基于双目视觉的机器人水下空间焊缝跟踪系统的研究的开题报告.docx
基于双目视觉的机器人水下空间焊缝跟踪系统的研究的开题报告1.研究背景与意义:水下焊接技术在海洋工程、船舶制造等领域具有广泛应用,但是由于水下环境的特殊性,使得水下焊接工作面临着很多难题,如焊缝跟踪问题。传统的焊缝跟踪装置只能在空气环境下工作,难以满足水下焊接的需求。因此,开发一种基于双目视觉技术的机器人水下空间焊缝跟踪系统有着重要意义。2.研究内容与目标:本论文旨在通过结合机器人技术和双目视觉技术,设计一种具有较高精度和稳定性的机器人水下空间焊缝跟踪系统,使焊缝在水下环境中能够被快速、准确地识别和跟踪。具
一种水下焊接机器人焊缝跟踪系统的焊缝跟踪控制方法.pdf
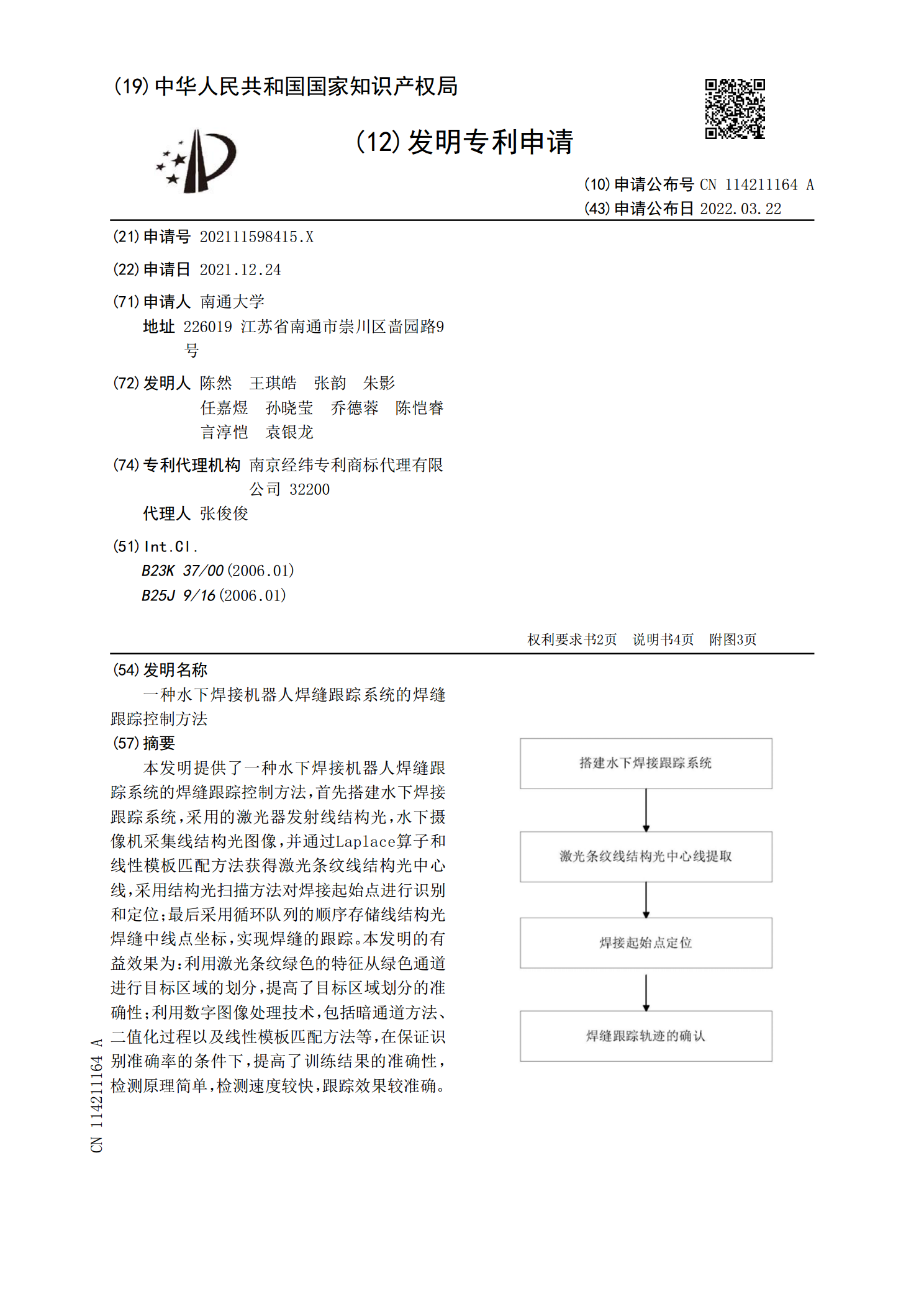
本发明提供了一种水下焊接机器人焊缝跟踪系统的焊缝跟踪控制方法,首先搭建水下焊接跟踪系统,采用的激光器发射线结构光,水下摄像机采集线结构光图像,并通过Laplace算子和线性模板匹配方法获得激光条纹线结构光中心线,采用结构光扫描方法对焊接起始点进行识别和定位;最后采用循环队列的顺序存储线结构光焊缝中线点坐标,实现焊缝的跟踪。本发明的有益效果为:利用激光条纹绿色的特征从绿色通道进行目标区域的划分,提高了目标区域划分的准确性;利用数字图像处理技术,包括暗通道方法、二值化过程以及线性模板匹配方法等,在保证识别准确

水下干式高压焊接焊缝跟踪实验系统研究的综述报告.docx
水下干式高压焊接焊缝跟踪实验系统研究的综述报告水下干式高压焊接技术是利用电弧的高温和高压力将金属材料焊接在一起的一种技术。该技术在水下应用范围广泛,如海底油气管道、海洋工程等领域。但是在水下环境中,由于水压和海水冷却作用,焊接过程中焊缝的质量很难得到保证。因此,开发跟踪系统以实时检测焊缝是解决水下高压焊接的关键技术之一。本文综述了水下干式高压焊接焊缝跟踪实验系统的研究进展。首先,介绍了水下干式高压焊接技术的原理及其应用领域。其次,介绍了焊缝跟踪技术的发展及其作用。然后,主要阐述了采用光学方法、声学方法和磁