
一种精密水平调节装置.pdf

慧红****ad


1/10

2/10
3/10

4/10

5/10

6/10

7/10

8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种精密水平调节装置.pdf
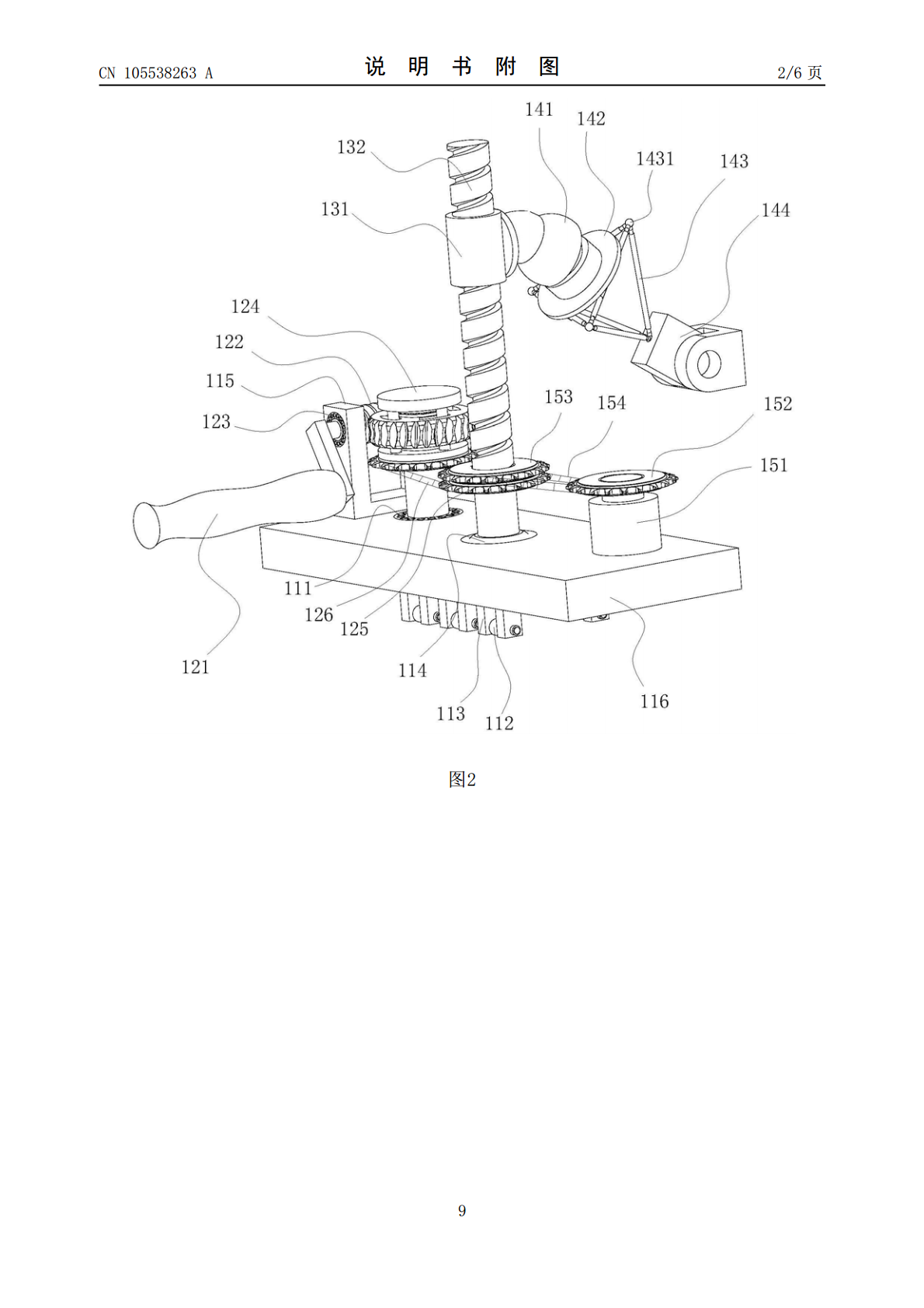
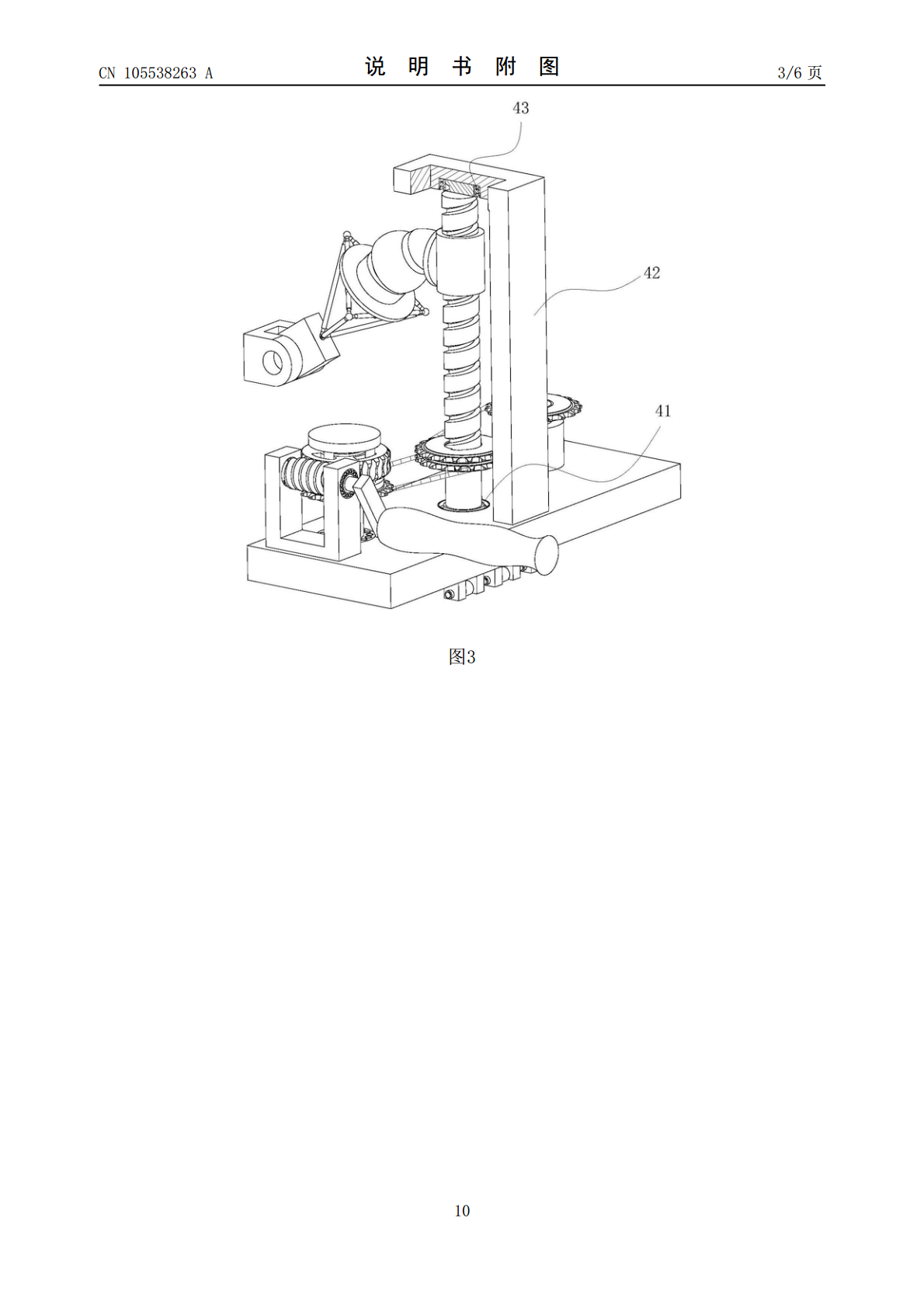
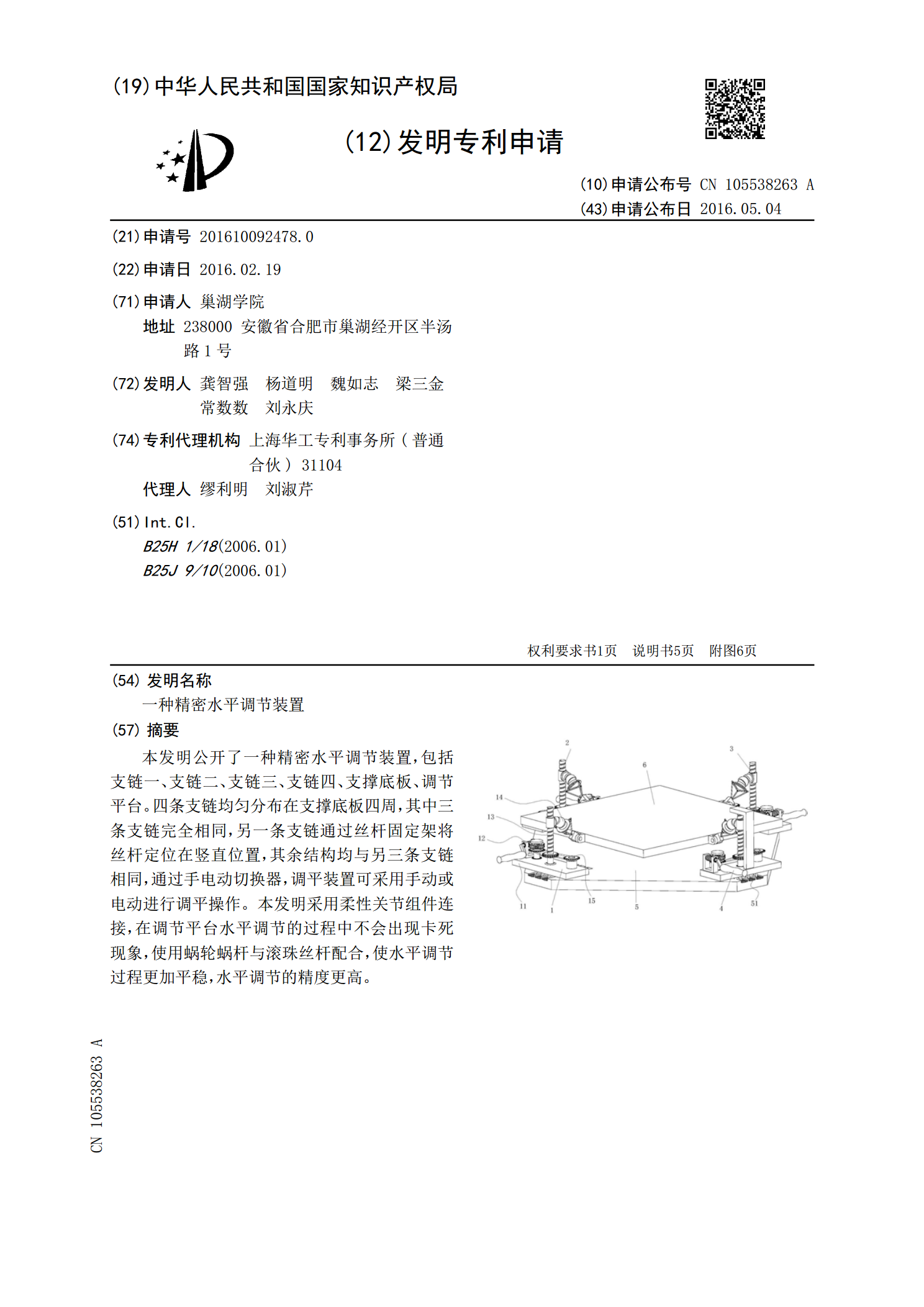
本发明公开了一种精密水平调节装置,包括支链一、支链二、支链三、支链四、支撑底板、调节平台。四条支链均匀分布在支撑底板四周,其中三条支链完全相同,另一条支链通过丝杆固定架将丝杆定位在竖直位置,其余结构均与另三条支链相同,通过手电动切换器,调平装置可采用手动或电动进行调平操作。本发明采用柔性关节组件连接,在调节平台水平调节的过程中不会出现卡死现象,使用蜗轮蜗杆与滚珠丝杆配合,使水平调节过程更加平稳,水平调节的精度更高。
一种旋转精密调节装置.pdf
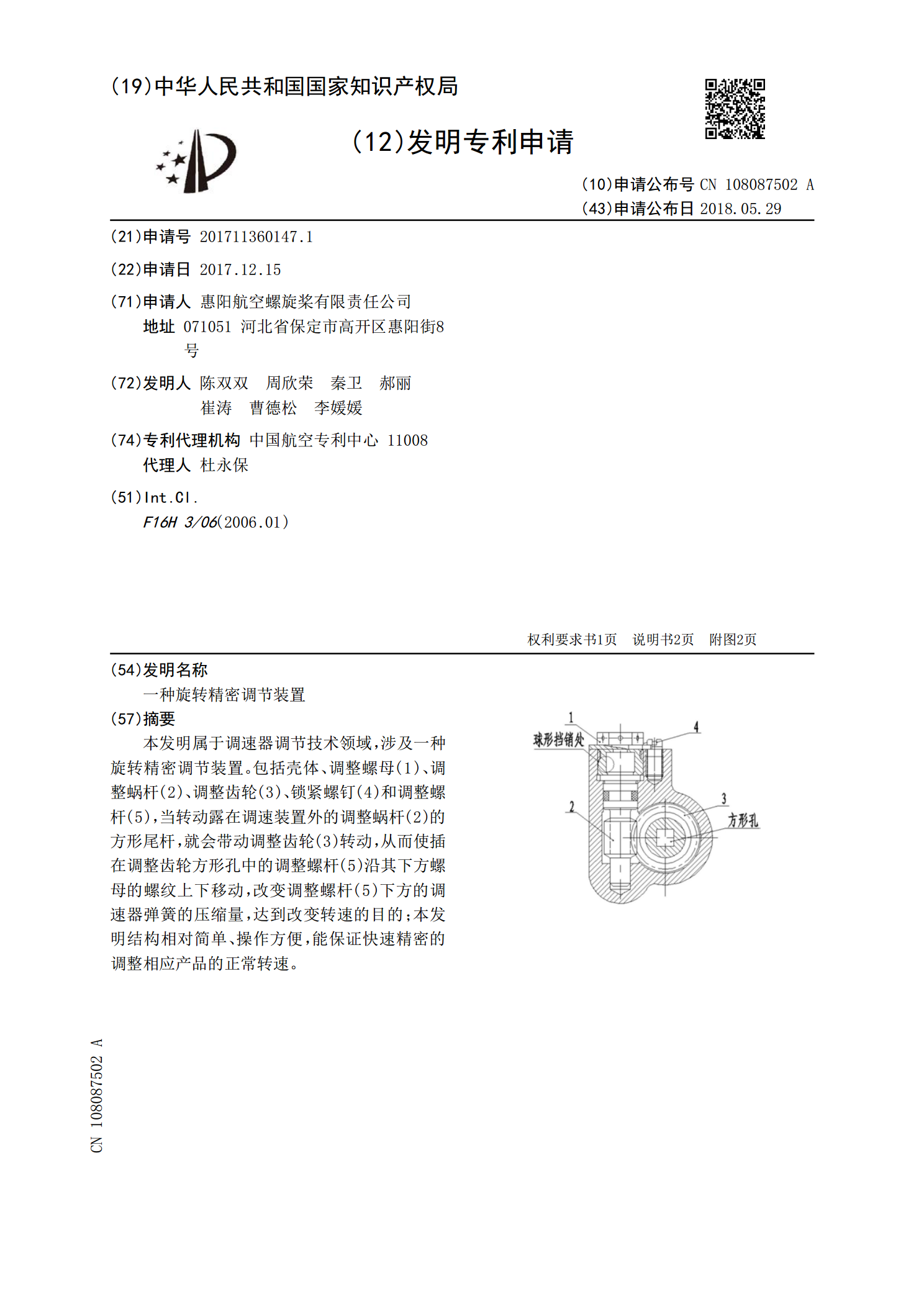
本发明属于调速器调节技术领域,涉及一种旋转精密调节装置。包括壳体、调整螺母(1)、调整蜗杆(2)、调整齿轮(3)、锁紧螺钉(4)和调整螺杆(5),当转动露在调速装置外的调整蜗杆(2)的方形尾杆,就会带动调整齿轮(3)转动,从而使插在调整齿轮方形孔中的调整螺杆(5)沿其下方螺母的螺纹上下移动,改变调整螺杆(5)下方的调速器弹簧的压缩量,达到改变转速的目的;本发明结构相对简单、操作方便,能保证快速精密的调整相应产品的正常转速。
一种无极调节全自动精密校直装置.pdf
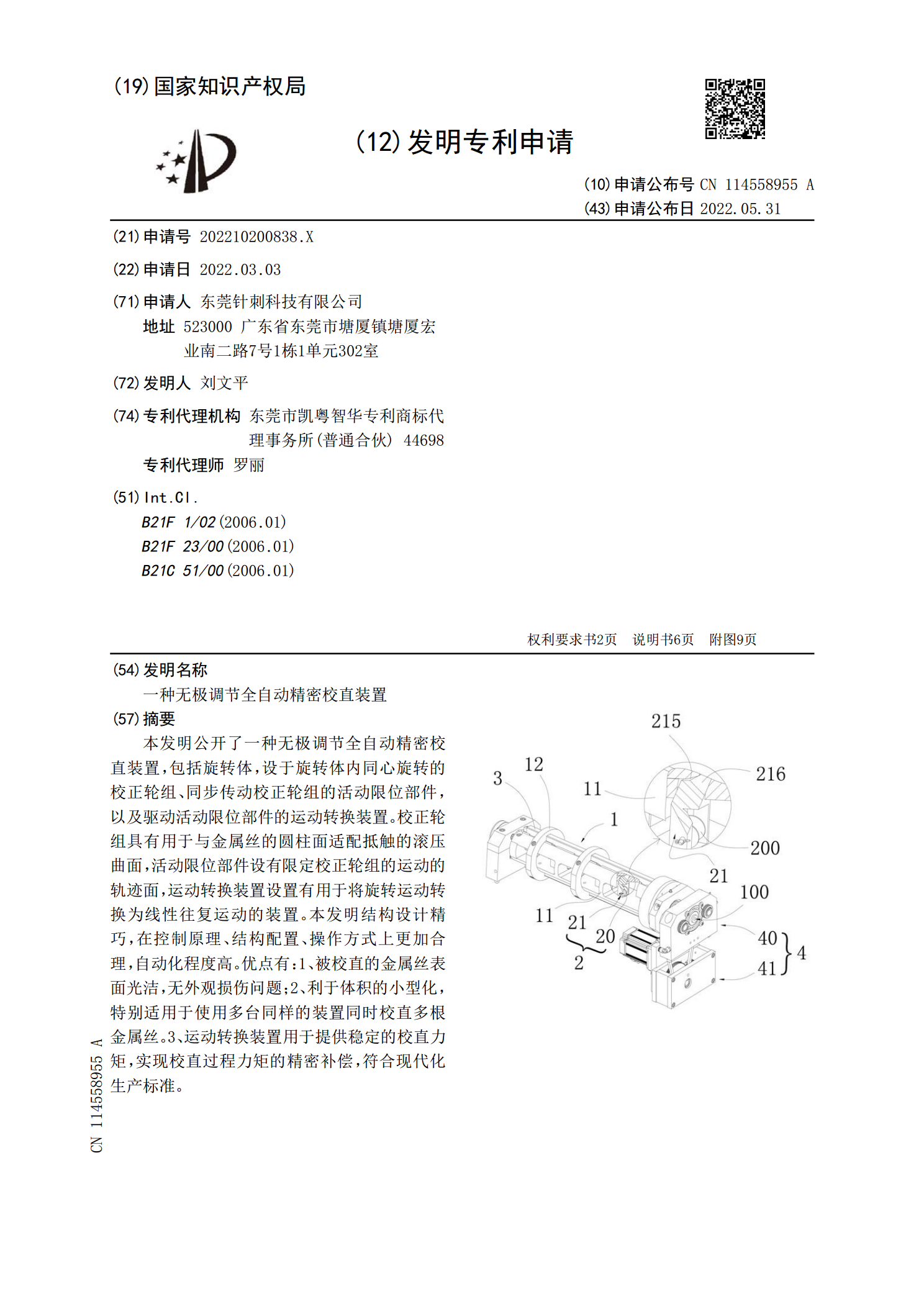
本发明公开了一种无极调节全自动精密校直装置,包括旋转体,设于旋转体内同心旋转的校正轮组、同步传动校正轮组的活动限位部件,以及驱动活动限位部件的运动转换装置。校正轮组具有用于与金属丝的圆柱面适配抵触的滚压曲面,活动限位部件设有限定校正轮组的运动的轨迹面,运动转换装置设置有用于将旋转运动转换为线性往复运动的装置。本发明结构设计精巧,在控制原理、结构配置、操作方式上更加合理,自动化程度高。优点有:1、被校直的金属丝表面光洁,无外观损伤问题;2、利于体积的小型化,特别适用于使用多台同样的装置同时校直多根金属丝。3
一种可调节式精密果实分级装置.pdf
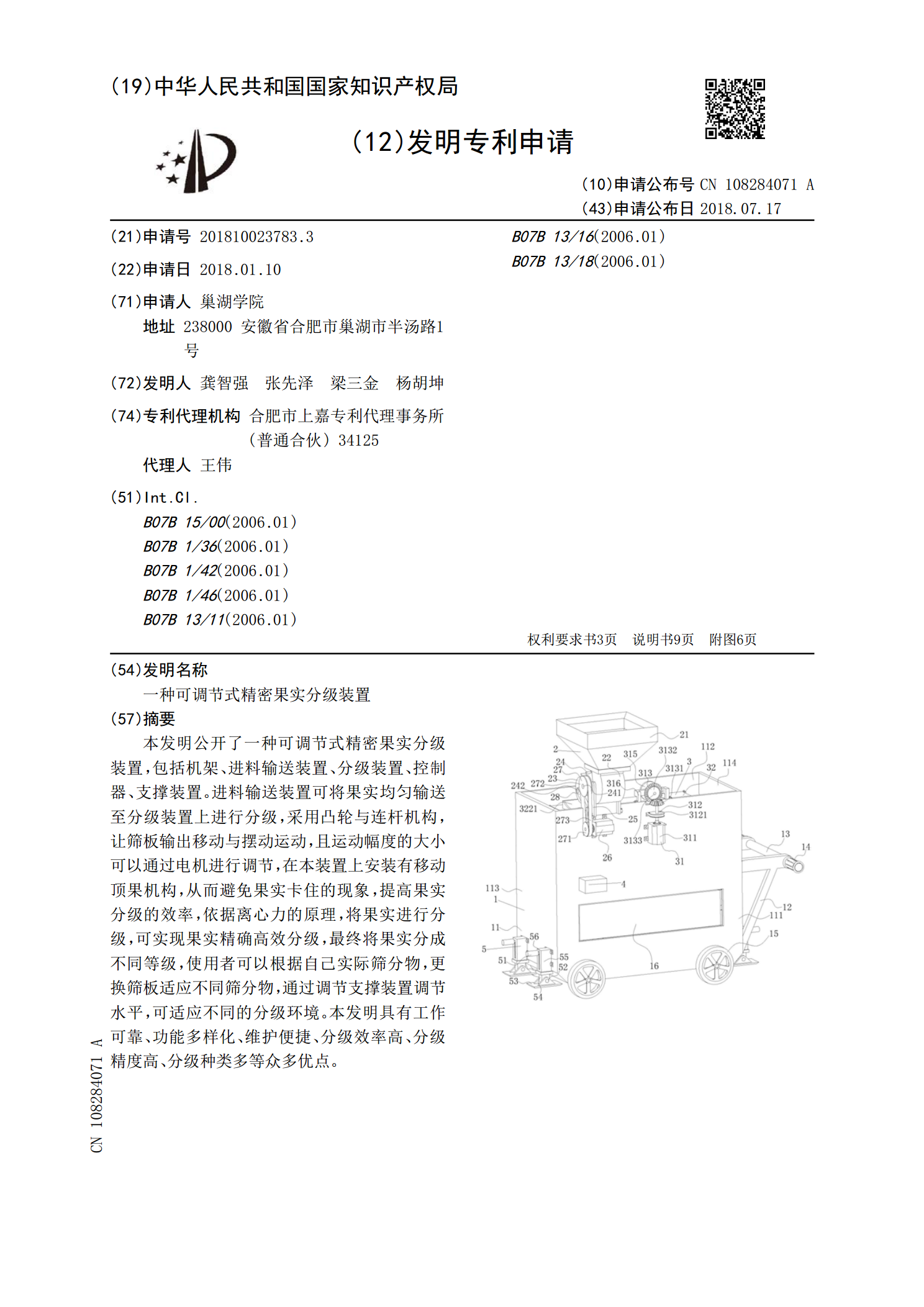
本发明公开了一种可调节式精密果实分级装置,包括机架、进料输送装置、分级装置、控制器、支撑装置。进料输送装置可将果实均匀输送至分级装置上进行分级,采用凸轮与连杆机构,让筛板输出移动与摆动运动,且运动幅度的大小可以通过电机进行调节,在本装置上安装有移动顶果机构,从而避免果实卡住的现象,提高果实分级的效率,依据离心力的原理,将果实进行分级,可实现果实精确高效分级,最终将果实分成不同等级,使用者可以根据自己实际筛分物,更换筛板适应不同筛分物,通过调节支撑装置调节水平,可适应不同的分级环境。本发明具有工作可靠、功能

一种精密机械水平调节结构.pdf
本发明公开了一种精密机械水平调节结构,包括台体、固定盘、工作台面、传动电机与螺纹支杆,所述台体与传动电机为固定连接,所述台体与螺纹支杆为固定连接,所述螺纹支杆的数量设置为三个,所述固定盘的顶端设有转动槽,所述转动槽的数量设置为三个。本发明中通过设置传动电机、第一齿轮、第二齿轮与第三齿轮,在使用时,通过控制传动电机的运作,从而带动螺纹杆进行运动,从而对设备整体的高度进行调整,通过第三齿轮带动推动块挤压支撑杆的内壁,对螺纹支杆与支撑杆进行有效固定,增强设备调整的精度,有效防止使用时产生松动而导致的精度降低,通