
一种非接触的钢轨表面伤损检测方法及其装置.pdf

羽沫****魔王


1/10
2/10

3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种非接触的钢轨表面伤损检测方法及其装置.pdf
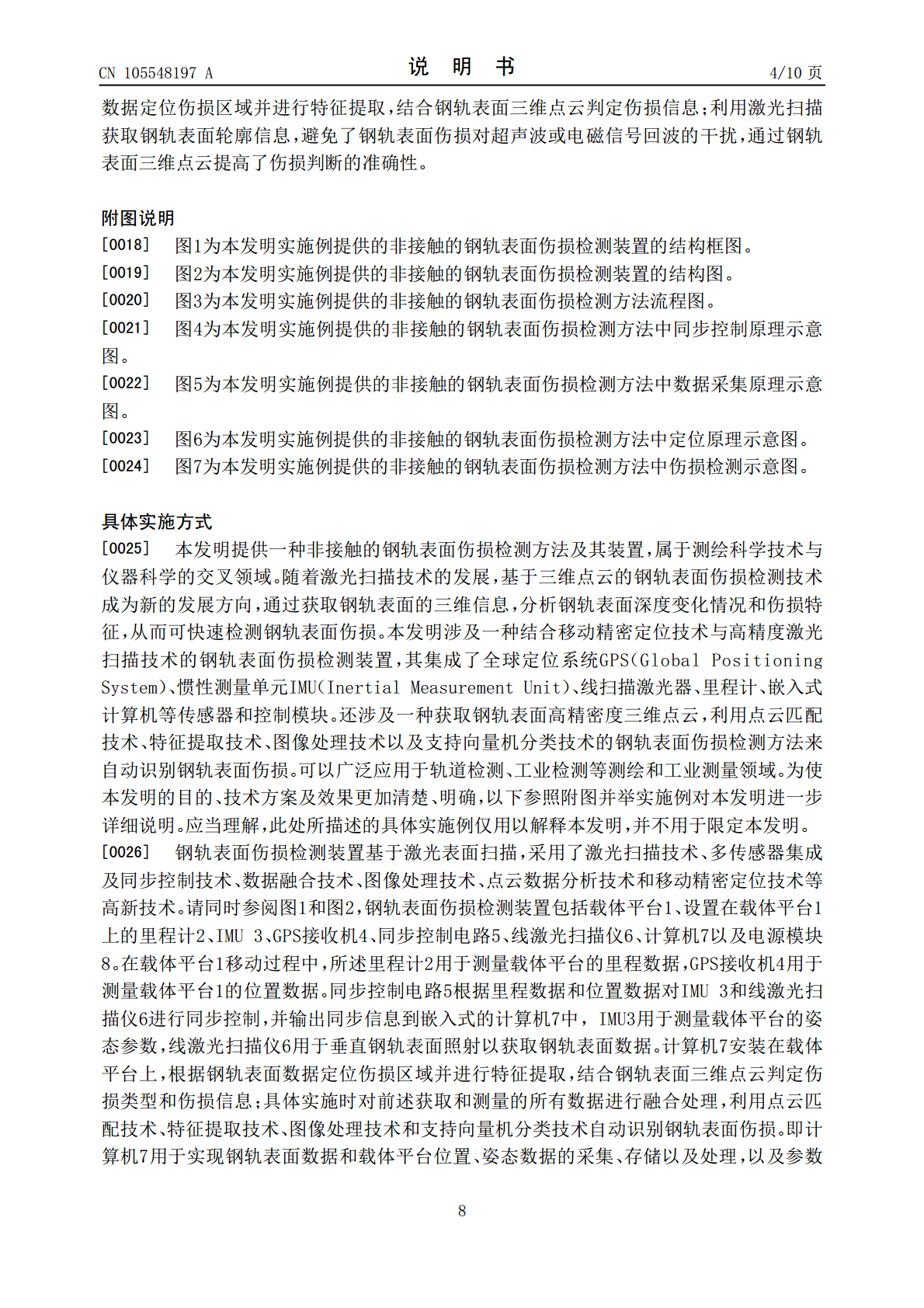
本发明公开了一种非接触的钢轨表面伤损检测方法及其装置,钢轨表面伤损检测方法包括:由里程计测量载体平台的里程数据,同时由GPS接收机测量载体平台的位置数据;同步控制电路根据里程数据和位置数据对IMU和线激光扫描仪进行同步控制,并输出同步信息给计算机;IMU测量载体平台的姿态参数,线激光扫描仪获取钢轨表面数据并传输给计算机;计算机根据里程数据、位置数据、姿态参数和钢轨表面数据计算出钢轨表面三维点云;根据钢轨表面数据定位伤损区域并进行特征提取,结合钢轨表面三维点云判定伤损信息;利用激光扫描获取钢轨表面轮廓信息,
一种钢轨表面伤损检测装置及方法.pdf
本发明是一种钢轨表面伤损检测装置及方法。该装置主要包括四个激光传感器采集数据,输送辊传送钢轨,编码器记录钢轨位置。该方法将采集到的数据先行分段并去掉重叠部分。计算时先分析一小范围数据,其后分析相邻小范围数据,如此递进直到完成整个钢轨断面。该方法采用抛物线拟合或直线拟合来代表小范围的理想轮廓,然后根据数据点到理想轮廓上相应点的距离来判断伤损。当发现伤损时,该装置将停止钢轨运动,实时声光报警,并记录当前和后续若干扫描断面廓形以及当前钢轨位置。用户可查询这些廓形的三维立体视图及其它数据。本发明提供了一种钢轨自动
铁路钢轨伤损检测方法及装置.pdf
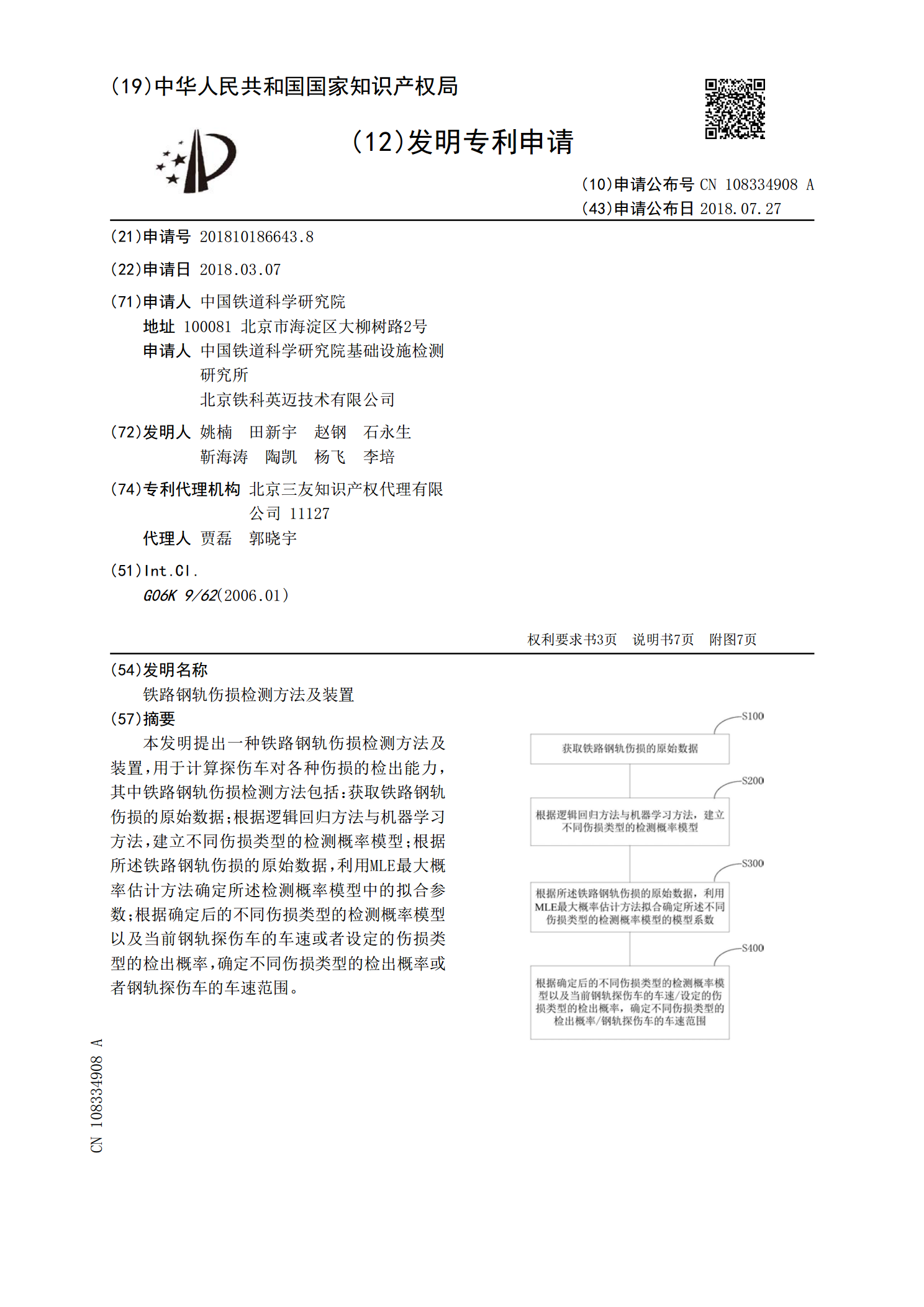
本发明提出一种铁路钢轨伤损检测方法及装置,用于计算探伤车对各种伤损的检出能力,其中铁路钢轨伤损检测方法包括:获取铁路钢轨伤损的原始数据;根据逻辑回归方法与机器学习方法,建立不同伤损类型的检测概率模型;根据所述铁路钢轨伤损的原始数据,利用MLE最大概率估计方法确定所述检测概率模型中的拟合参数;根据确定后的不同伤损类型的检测概率模型以及当前钢轨探伤车的车速或者设定的伤损类型的检出概率,确定不同伤损类型的检出概率或者钢轨探伤车的车速范围。
钢轨伤损检测方法.pdf
本发明公开了一种钢轨伤损检测方法,车载计算机对数据文件进行解析和伤损识别后显示存储识别结果,并将伤损样本和识别结果发送至样本库服务器。地面计算机对数据文件进行解析和伤损识别后显示存储识别结果,并将伤损样本和识别结果传输至样本库服务器。样本库服务器进行样本库管理,深度学习工作站根据样本库服务器中的选定样本优化伤损识别模型,并升级车载或地面计算机中的伤损识别模型。伤损识别模型基于卷积神经网络生成,输入卷积神经网络的图像为N个通道叠加而成且带有方向的RGB重构图像。本发明能解决现有钢轨伤损识别方式的网络输入直接

非接触式钢轨磨耗检测装置.pdf
本发明公开一种非接触式钢轨磨耗检测装置,该钢轨磨耗检测装置包括走行部分、检测部分、数据采集部分以及显示设备四个部分。本发明的优点在于:走行部分由在传统的只有两个纵向走行轮的基础上增加了八个小走行轮组成,可以保证装置在推行的过程中不会发生掉道的情况,测量装置采用非接触式测量方式,能够在装置的推行过程中完成磨耗测量,具有较高的效率,同时测量点位具有连续性,该方式具有较高的精度和可靠性,装置具有好的适用性。