
一种高效率的树木修剪器.pdf

是你****噩呀

1/10
2/10
3/10
4/10

5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种高效率的树木修剪器.pdf
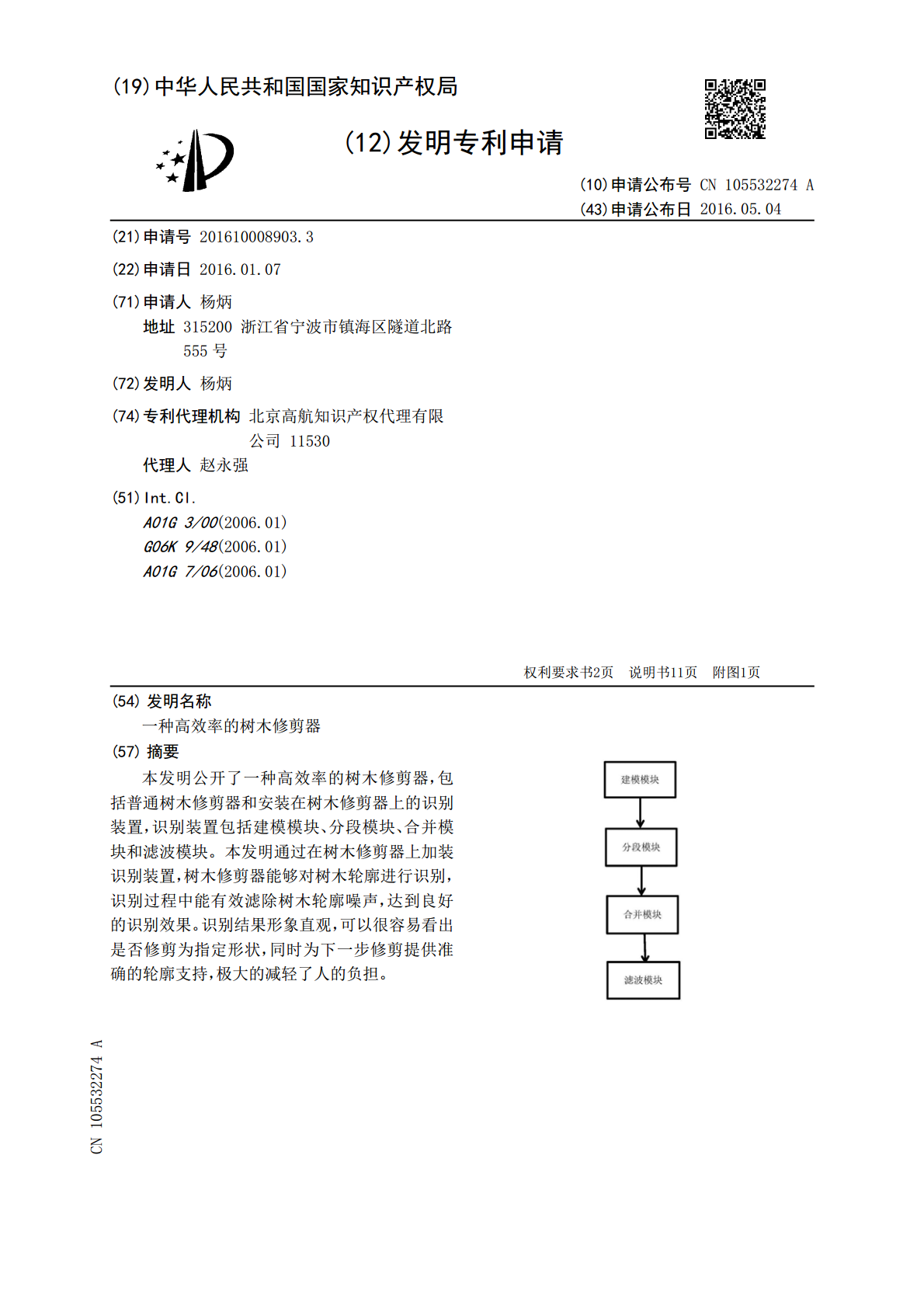
本发明公开了一种高效率的树木修剪器,包括普通树木修剪器和安装在树木修剪器上的识别装置,识别装置包括建模模块、分段模块、合并模块和滤波模块。本发明通过在树木修剪器上加装识别装置,树木修剪器能够对树木轮廓进行识别,识别过程中能有效滤除树木轮廓噪声,达到良好的识别效果。识别结果形象直观,可以很容易看出是否修剪为指定形状,同时为下一步修剪提供准确的轮廓支持,极大的减轻了人的负担。

一种树木修剪器.pdf
一种树木修剪器,包括底盘、支架以及切刀,底盘为圆盘结构,顶部中心竖直安装支架,底部安装滚轮;在支架顶端安装圆锥形框架,框架的底端活动连接在支架顶端,框架的顶口中心处通过连杆安装电机,所述电机的转轴上固接多个切刀;在框架的侧壁对称两端分别活动连接操控手柄。本发明具有设计合理、方便实用、操作简单等优点。
一种多功能树木修剪器.pdf
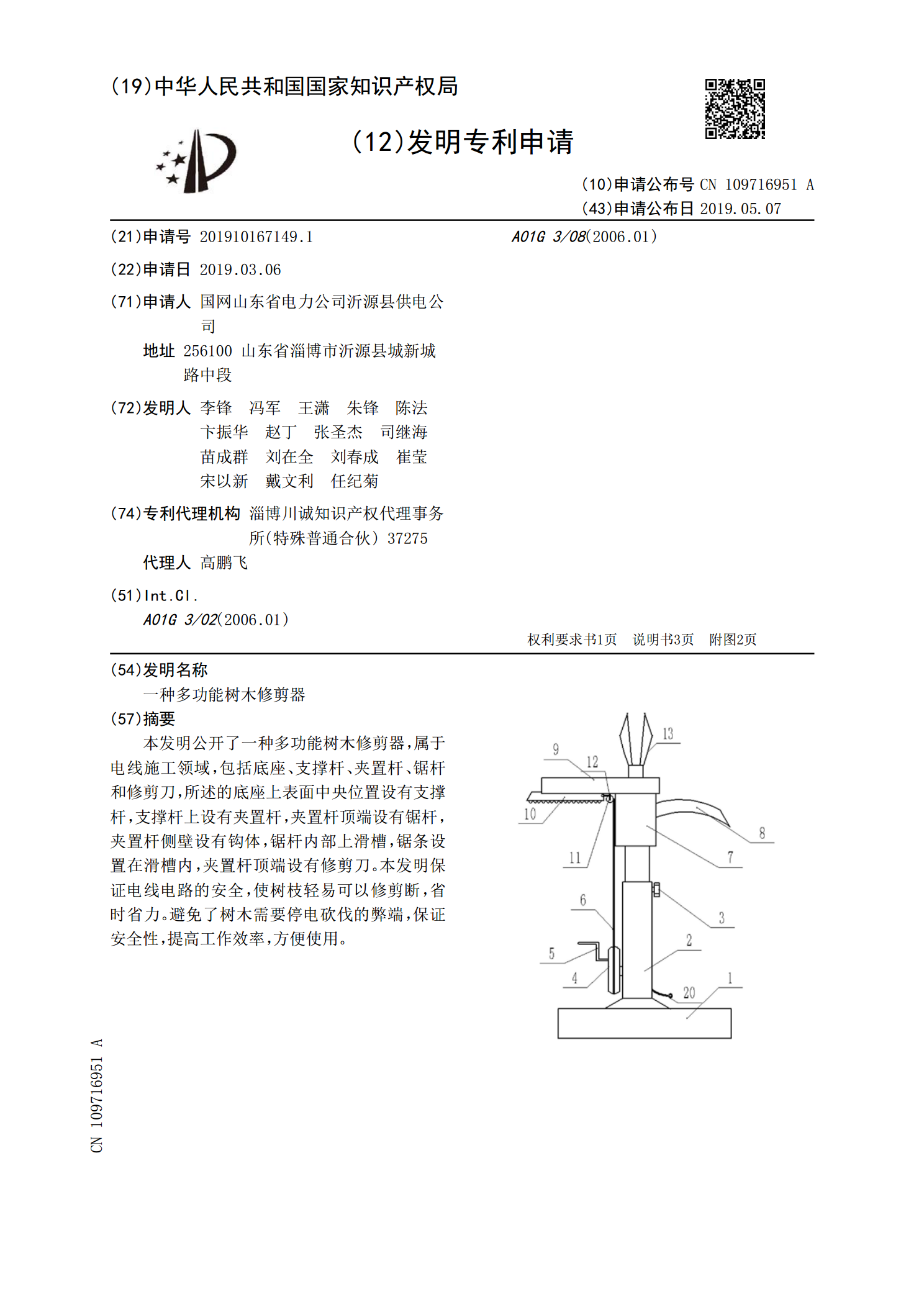
本发明公开了一种多功能树木修剪器,属于电线施工领域,包括底座、支撑杆、夹置杆、锯杆和修剪刀,所述的底座上表面中央位置设有支撑杆,支撑杆上设有夹置杆,夹置杆顶端设有锯杆,夹置杆侧壁设有钩体,锯杆内部上滑槽,锯条设置在滑槽内,夹置杆顶端设有修剪刀。本发明保证电线电路的安全,使树枝轻易可以修剪断,省时省力。避免了树木需要停电砍伐的弊端,保证安全性,提高工作效率,方便使用。

高压架空线路下树木修剪器.pdf
本申请实施例提供的高压架空线路下树木修剪器,通过四个连接杆和四个纵向行走器安装在高压架空线路下,能够沿高压架空线路的延伸方向移动,结构稳定,不易出现晃动。横向行走器可以在横梁上横向移动,进而调节了锯片的横向位置,在修剪茂密的树木时,树木修剪器能够将横梁覆盖范围内的树枝全部修剪,扩大了修剪的范围,充分地保护了电力设备。

一种树木修剪车.pdf
一种树木修剪车,包括车体、车轮以及车顶,在车顶安装机座,在机座内安装电机,电机转轴从机座顶面竖直伸出,在电机转轴上套接转动环,在转动环的外壁均匀安装切刀。本发明具有操作简单、方便实用、应用广泛等优点。