
一种采摘器.pdf

是湛****21


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种采摘器.pdf
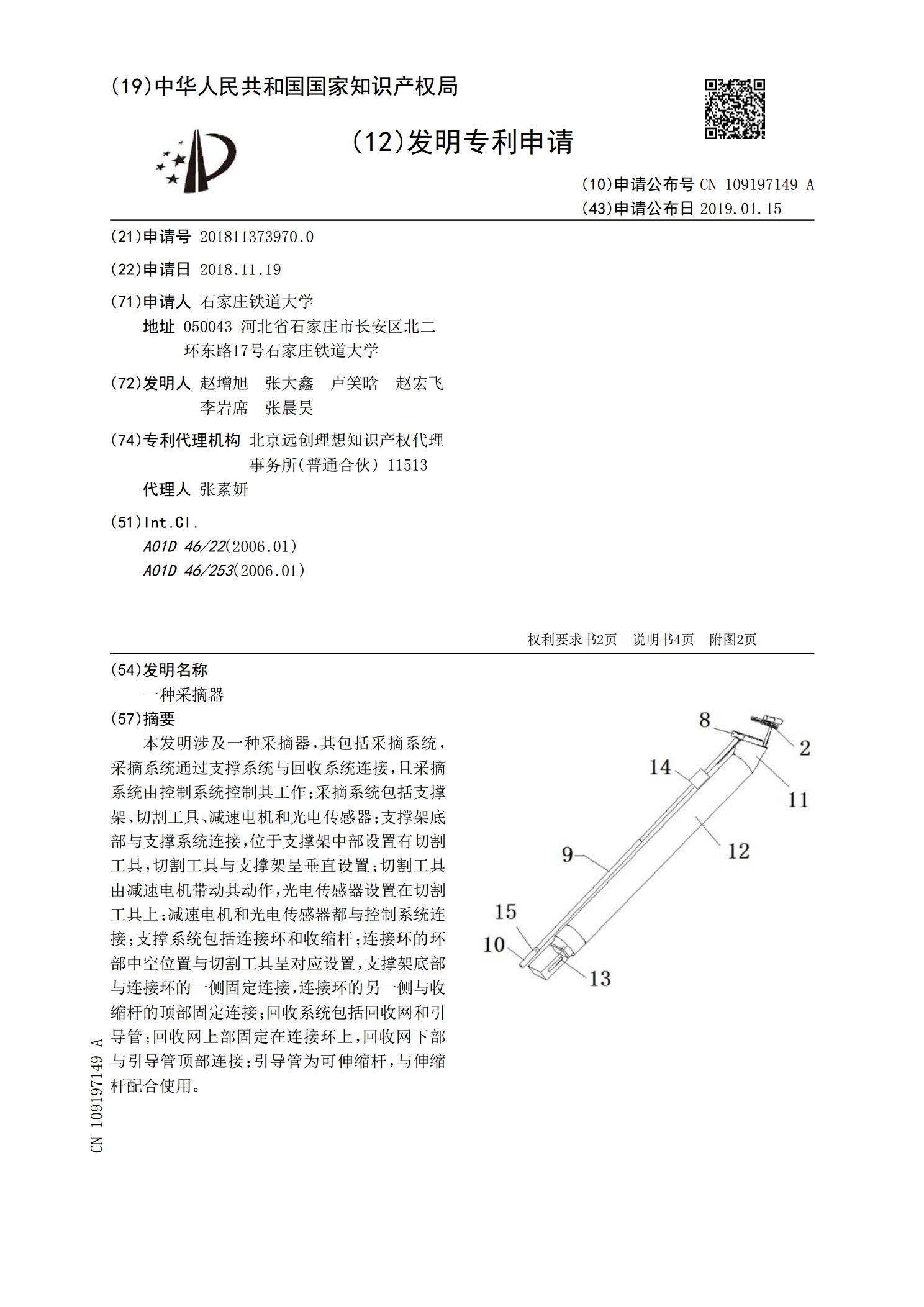
本发明涉及一种采摘器,其包括采摘系统,采摘系统通过支撑系统与回收系统连接,且采摘系统由控制系统控制其工作;采摘系统包括支撑架、切割工具、减速电机和光电传感器;支撑架底部与支撑系统连接,位于支撑架中部设置有切割工具,切割工具与支撑架呈垂直设置;切割工具由减速电机带动其动作,光电传感器设置在切割工具上;减速电机和光电传感器都与控制系统连接;支撑系统包括连接环和收缩杆;连接环的环部中空位置与切割工具呈对应设置,支撑架底部与连接环的一侧固定连接,连接环的另一侧与收缩杆的顶部固定连接;回收系统包括回收网和引导管;回
一种采摘器.pdf
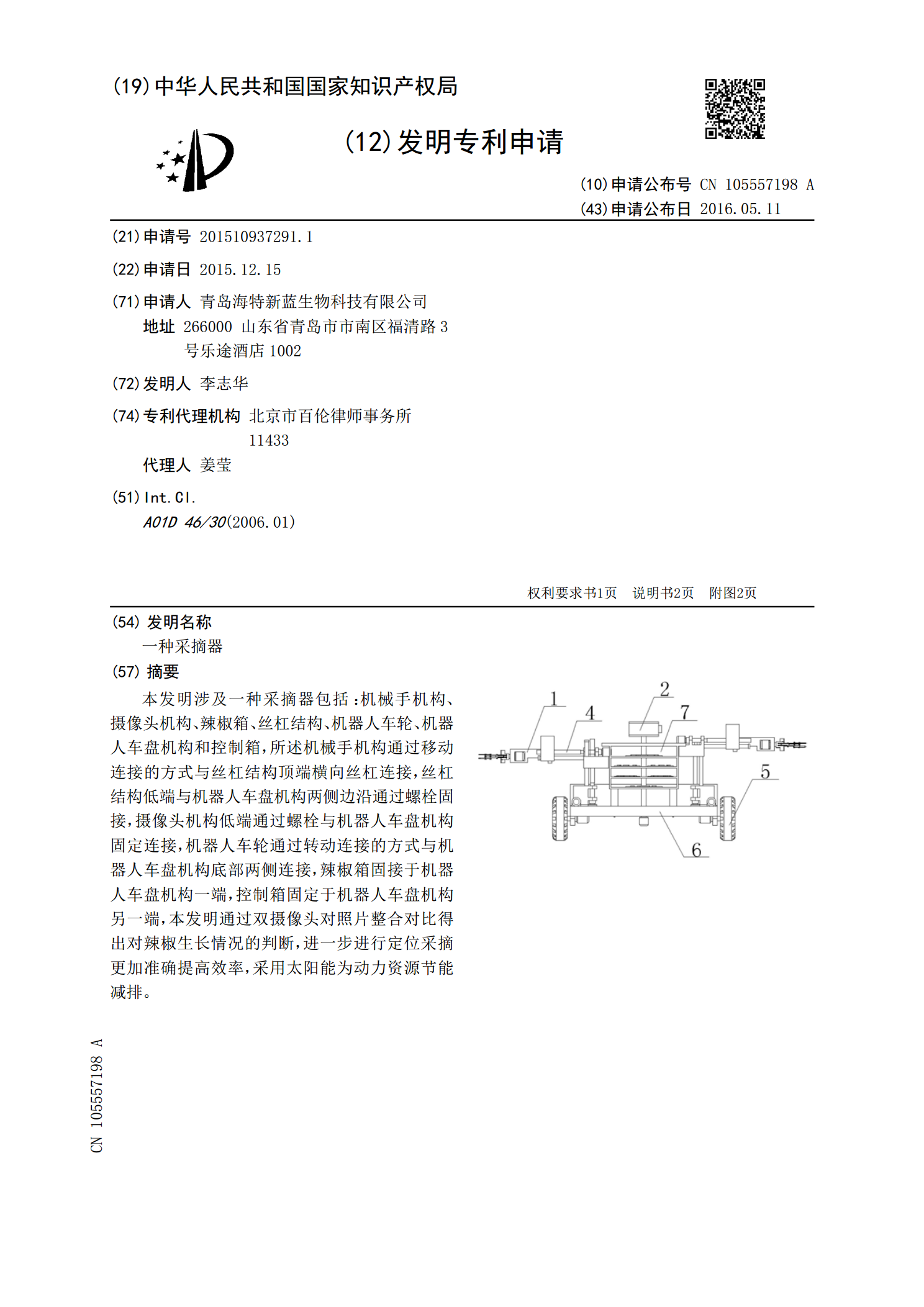
本发明涉及一种采摘器包括:机械手机构、摄像头机构、辣椒箱、丝杠结构、机器人车轮、机器人车盘机构和控制箱,所述机械手机构通过移动连接的方式与丝杠结构顶端横向丝杠连接,丝杠结构低端与机器人车盘机构两侧边沿通过螺栓固接,摄像头机构低端通过螺栓与机器人车盘机构固定连接,机器人车轮通过转动连接的方式与机器人车盘机构底部两侧连接,辣椒箱固接于机器人车盘机构一端,控制箱固定于机器人车盘机构另一端,本发明通过双摄像头对照片整合对比得出对辣椒生长情况的判断,进一步进行定位采摘更加准确提高效率,采用太阳能为动力资源节能减排。
一种可连续采摘的水果采摘器.pdf
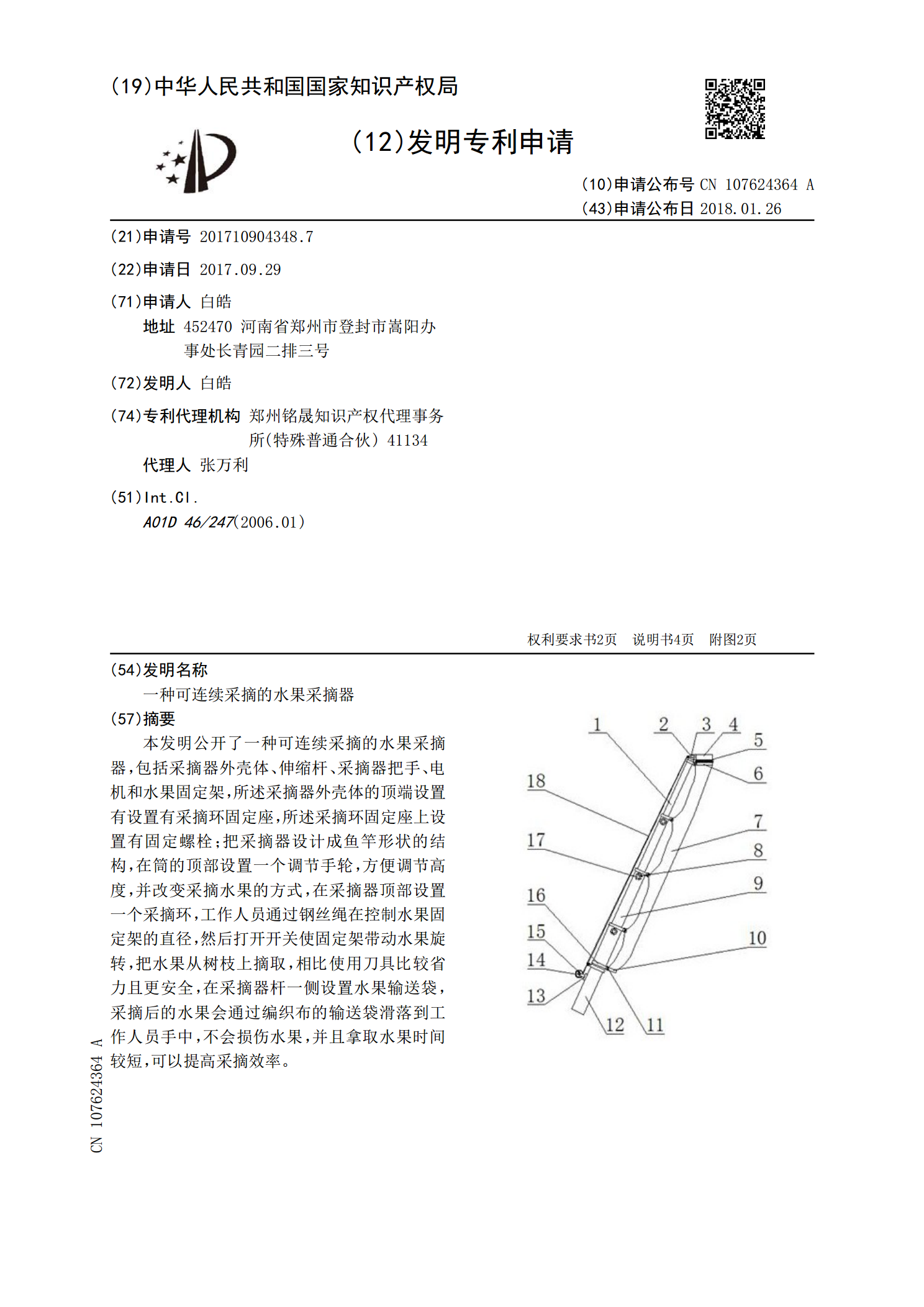
本发明公开了一种可连续采摘的水果采摘器,包括采摘器外壳体、伸缩杆、采摘器把手、电机和水果固定架,所述采摘器外壳体的顶端设置有设置有采摘环固定座,所述采摘环固定座上设置有固定螺栓;把采摘器设计成鱼竿形状的结构,在筒的顶部设置一个调节手轮,方便调节高度,并改变采摘水果的方式,在采摘器顶部设置一个采摘环,工作人员通过钢丝绳在控制水果固定架的直径,然后打开开关使固定架带动水果旋转,把水果从树枝上摘取,相比使用刀具比较省力且更安全,在采摘器杆一侧设置水果输送袋,采摘后的水果会通过编织布的输送袋滑落到工作人员手中,不

一种石榴采摘执行器、采摘系统及采摘方法.pdf
本发明公开了一种石榴采摘执行器、采摘系统及采摘方法,包括执行器框架环,所述执行器框架环上设置有内剪切环模块,所述内剪切环模块的外侧套设有外剪切环模块,所述外剪切环模块与内剪切环模块转动连接,所述外剪切环模块连接驱动单元;所述内剪切环模块上设置有周向分布的内环剪切刀片,所述外剪切环模块上设置有周向分布的外环剪切刀片,当外剪切环模块沿着内剪切环模块周向转动时,所述内环剪切刀片和外环剪切刀片之间处于开合状态或封闭状态,采摘环阵列一周剪切刀片,无需特定角度,采摘容错率高,末端执行器与果实无夹持等外力接触,不会造成

一种电动可连续采摘的水果采摘器.pdf
本发明公开了一种电动可连续采摘的水果采摘器,包括空心套杆、采摘器外壳体、弧形挡板和刀片,所述采摘器外壳体的顶端设置有水果采摘环固定座架,所述水果采摘环固定座架的右端设置有水果采摘环转轴;在采摘器顶部设置一个水果采摘环,水果采摘环采用空心结构,把刀具以及电机放到内部,利用齿轮传动,实现刀具的剪切,不需要人力剪切,方便操作,在水果采摘环的下方设置两个水果存储筐,两个水果存储筐通过钢丝绳和定滑轮在弧形挡板顶部交替运行,上下输送水果,保证机器工作的连续性,可以实现连续工作,提高采摘器的采摘效率,并把采摘器设置成三