
一种多功能轮椅.pdf

静芙****可爱


1/7
2/7
3/7

4/7

5/7

6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种多功能轮椅.pdf
一种多功能轮椅,属于一种康复或辅助行走工具,主要解决传统轮椅功能单一、遇到台阶或上楼梯时不方便的问题。其结构包括轮椅本体,在轮椅本体的脚踏板两侧设有辅助轮组,该辅助轮组由三个小轮相互连接并在同一圆周上均匀分布而成,并列的两个辅助轮组之间由轮轴进行连接。本发明结构简单,操作、使用安全方便,可在原有的轮椅基础上进行改装,设计及改装成本低,适用范围广,尤其适合医院或家庭中有行动不便的重症病人使用。
一种多功能轮椅.pdf
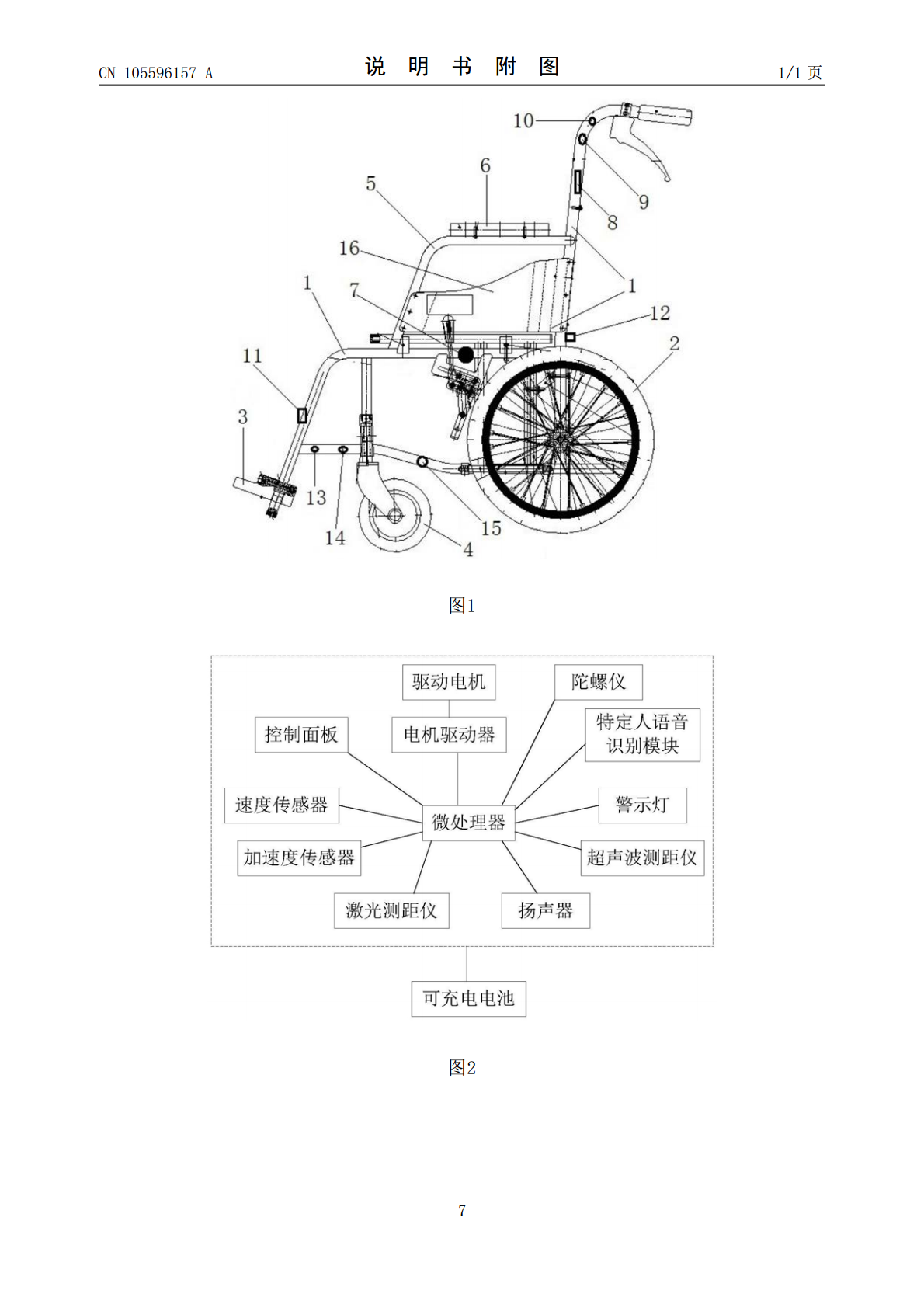
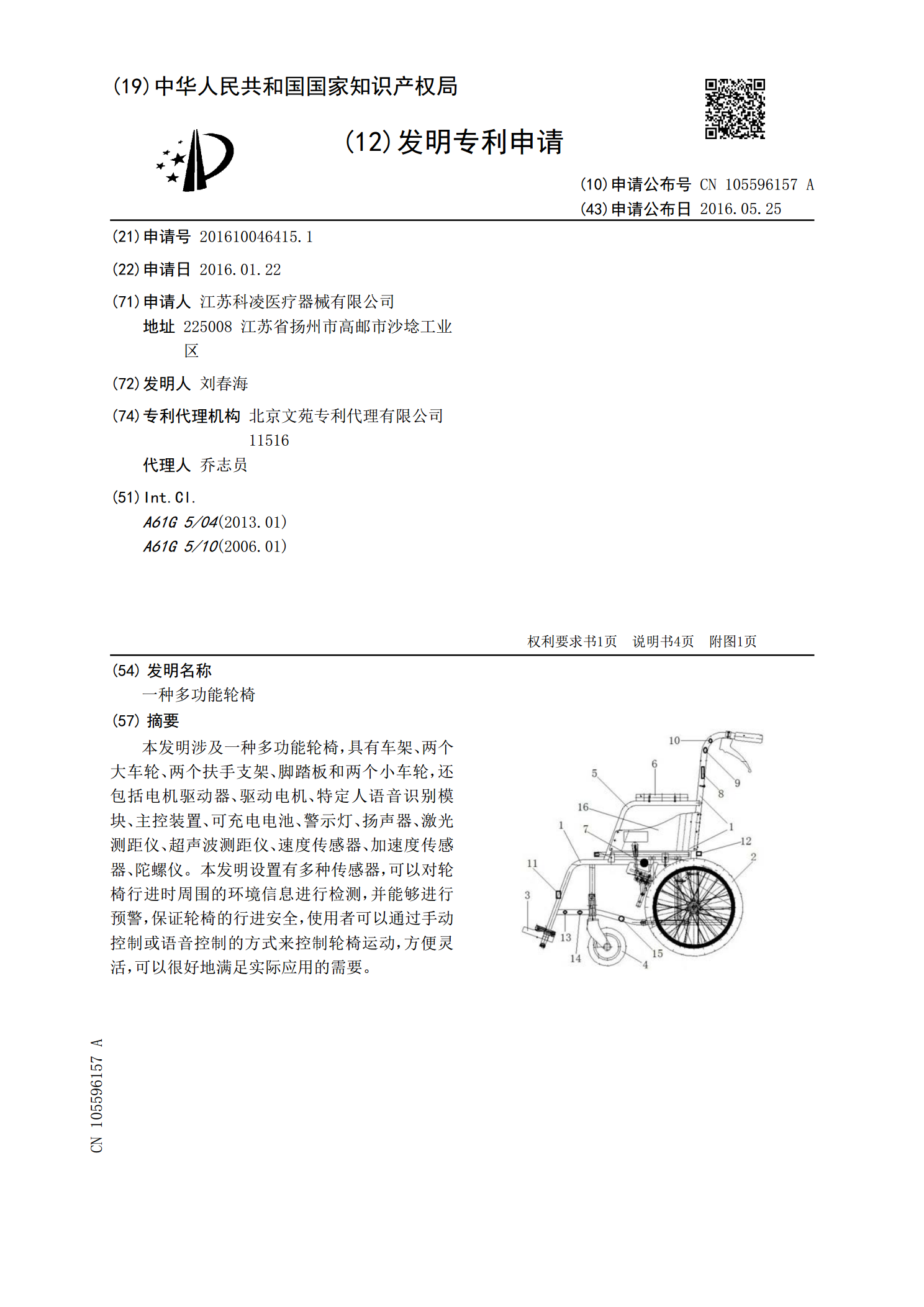
本发明涉及一种多功能轮椅,具有车架、两个大车轮、两个扶手支架、脚踏板和两个小车轮,还包括电机驱动器、驱动电机、特定人语音识别模块、主控装置、可充电电池、警示灯、扬声器、激光测距仪、超声波测距仪、速度传感器、加速度传感器、陀螺仪。本发明设置有多种传感器,可以对轮椅行进时周围的环境信息进行检测,并能够进行预警,保证轮椅的行进安全,使用者可以通过手动控制或语音控制的方式来控制轮椅运动,方便灵活,可以很好地满足实际应用的需要。
一种多功能轮椅.pdf
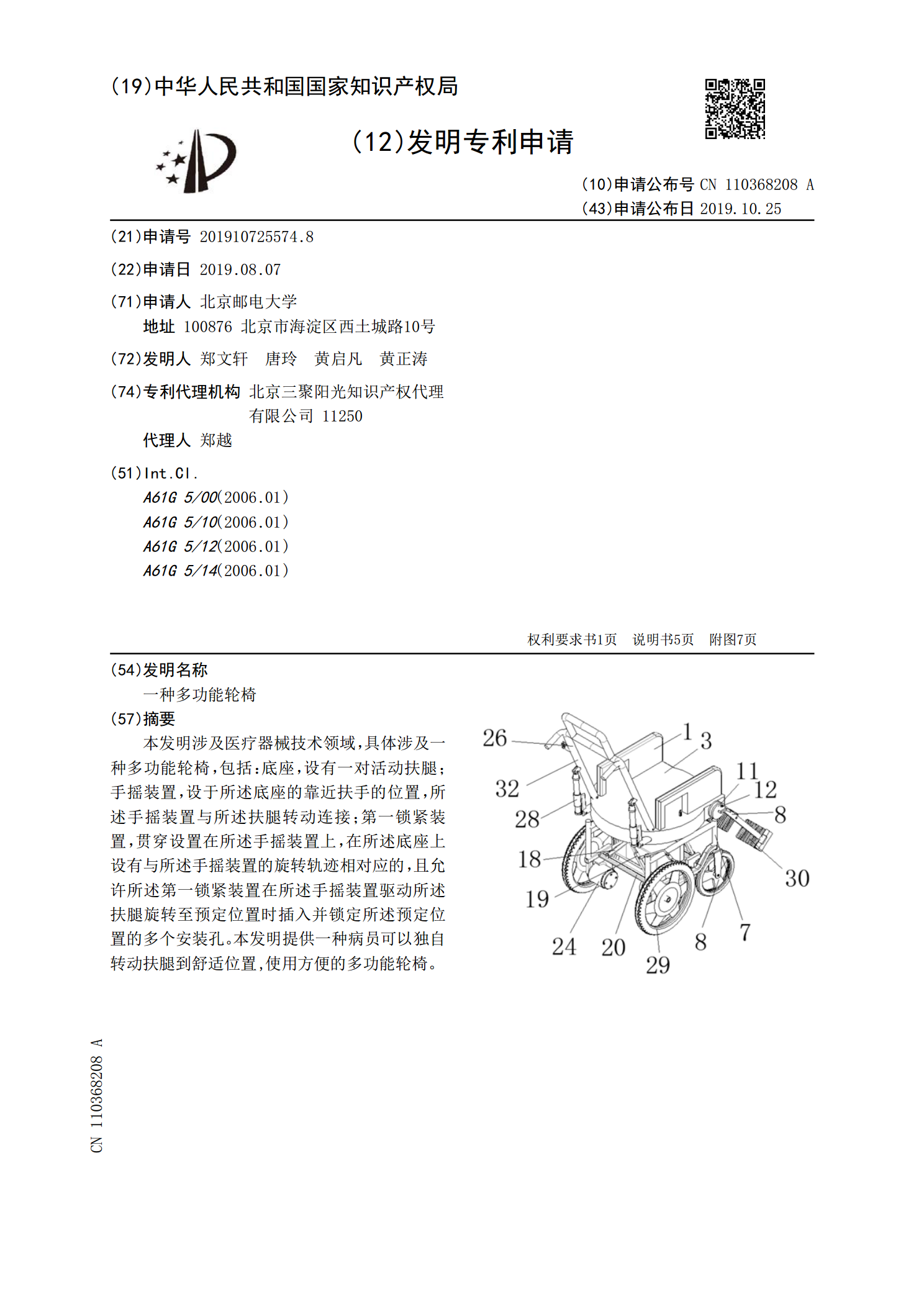
本发明涉及医疗器械技术领域,具体涉及一种多功能轮椅,包括:底座,设有一对活动扶腿;手摇装置,设于所述底座的靠近扶手的位置,所述手摇装置与所述扶腿转动连接;第一锁紧装置,贯穿设置在所述手摇装置上,在所述底座上设有与所述手摇装置的旋转轨迹相对应的,且允许所述第一锁紧装置在所述手摇装置驱动所述扶腿旋转至预定位置时插入并锁定所述预定位置的多个安装孔。本发明提供一种病员可以独自转动扶腿到舒适位置,使用方便的多功能轮椅。
一种多功能轮椅.pdf
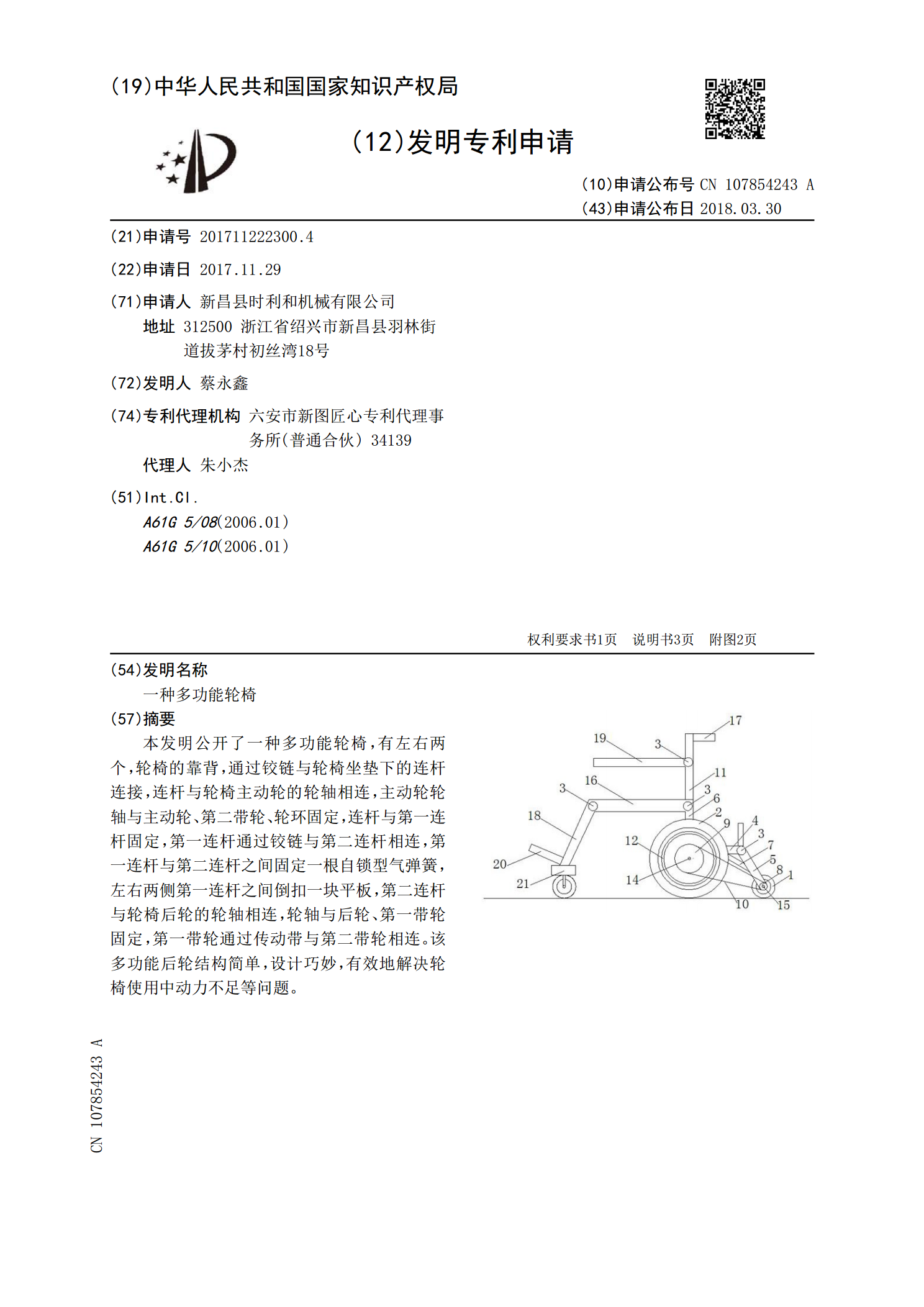
本发明公开了一种多功能轮椅,有左右两个,轮椅的靠背,通过铰链与轮椅坐垫下的连杆连接,连杆与轮椅主动轮的轮轴相连,主动轮轮轴与主动轮、第二带轮、轮环固定,连杆与第一连杆固定,第一连杆通过铰链与第二连杆相连,第一连杆与第二连杆之间固定一根自锁型气弹簧,左右两侧第一连杆之间倒扣一块平板,第二连杆与轮椅后轮的轮轴相连,轮轴与后轮、第一带轮固定,第一带轮通过传动带与第二带轮相连。该多功能后轮结构简单,设计巧妙,有效地解决轮椅使用中动力不足等问题。
一种多功能轮椅.pdf
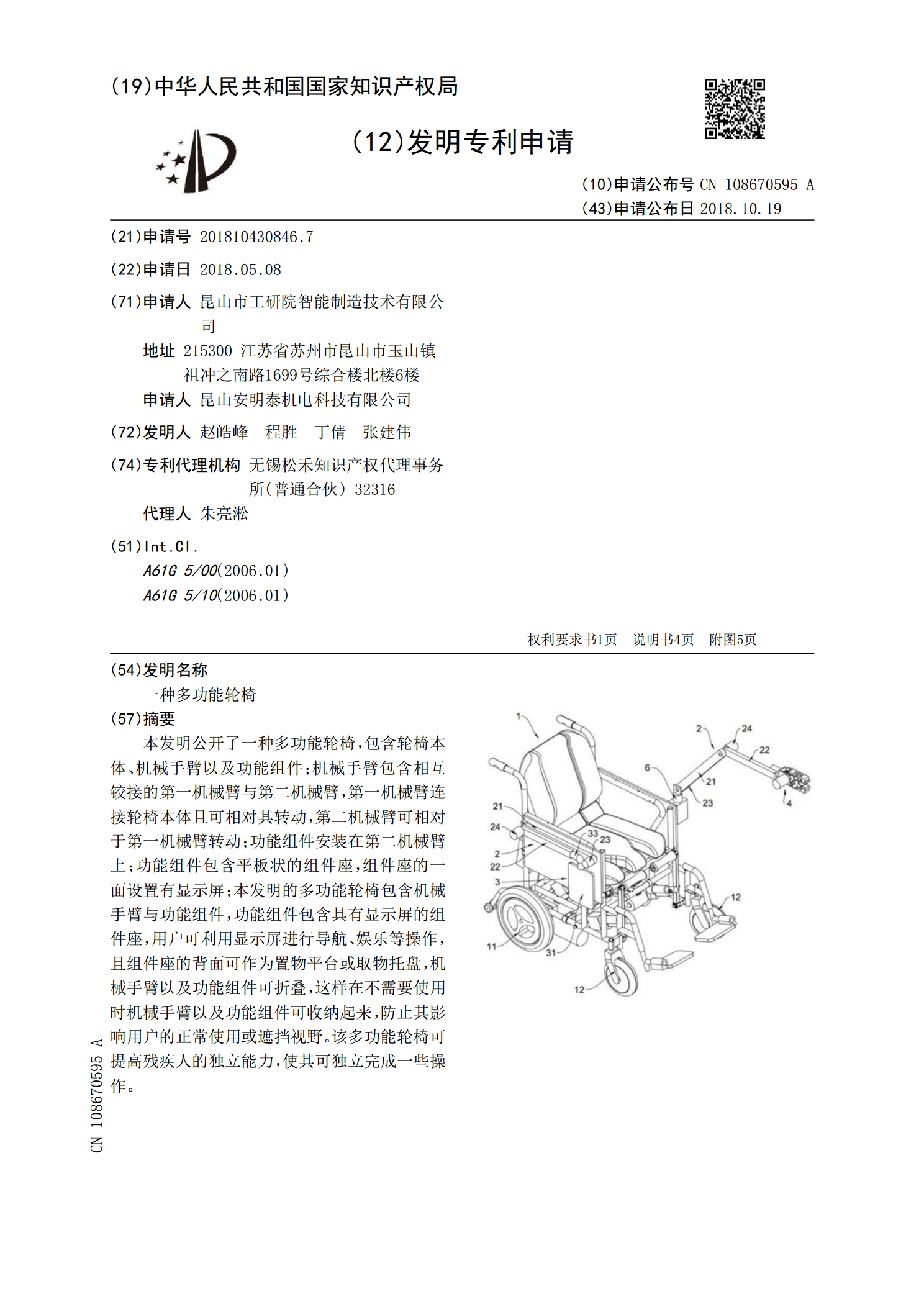
本发明公开了一种多功能轮椅,包含轮椅本体、机械手臂以及功能组件;机械手臂包含相互铰接的第一机械臂与第二机械臂,第一机械臂连接轮椅本体且可相对其转动,第二机械臂可相对于第一机械臂转动;功能组件安装在第二机械臂上;功能组件包含平板状的组件座,组件座的一面设置有显示屏;本发明的多功能轮椅包含机械手臂与功能组件,功能组件包含具有显示屏的组件座,用户可利用显示屏进行导航、娱乐等操作,且组件座的背面可作为置物平台或取物托盘,机械手臂以及功能组件可折叠,这样在不需要使用时机械手臂以及功能组件可收纳起来,防止其影响用户的