
基于直流并网飞轮储能系统的快速动态响应控制方法.pdf

猫巷****雪凝

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于直流并网飞轮储能系统的快速动态响应控制方法.pdf
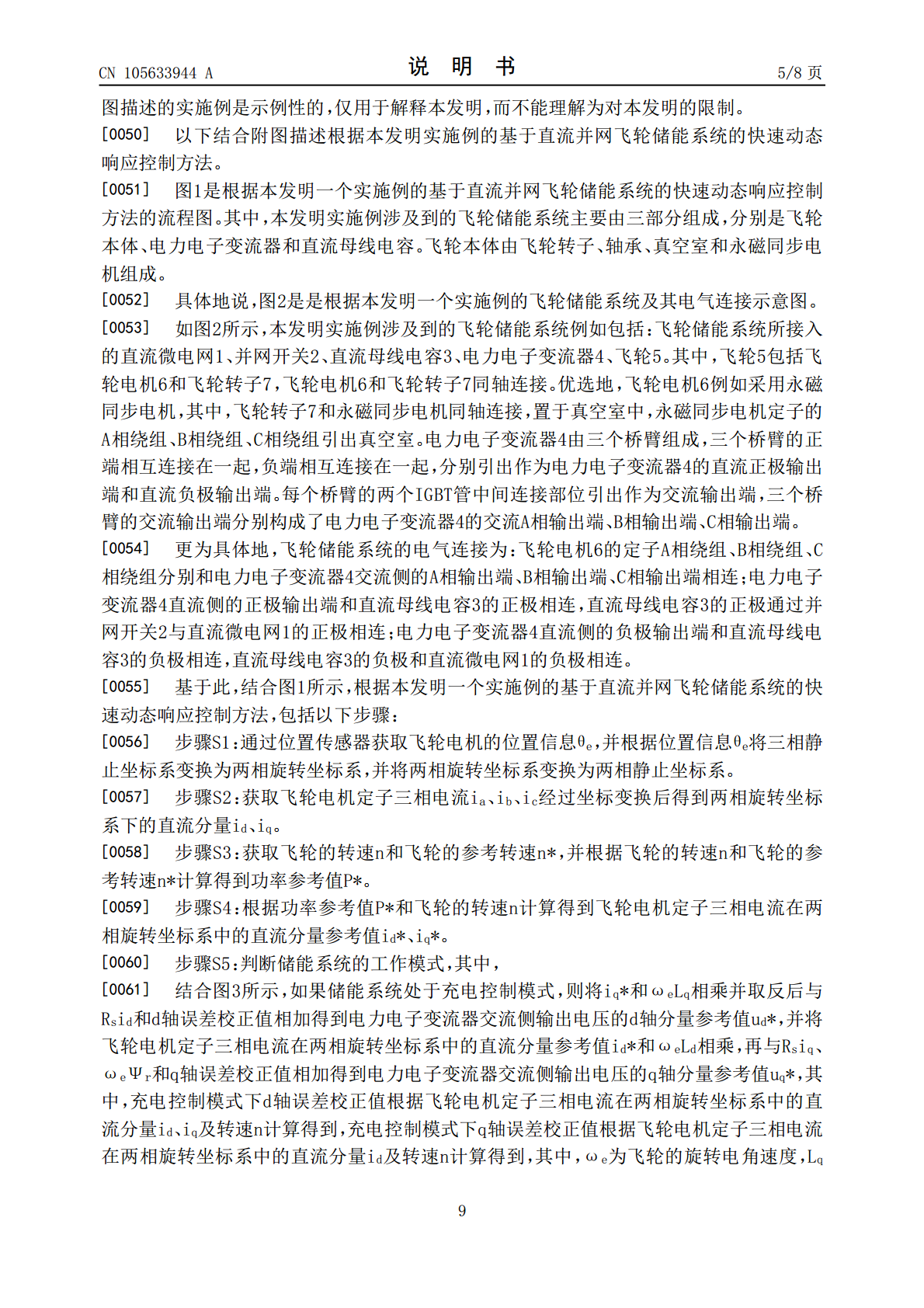
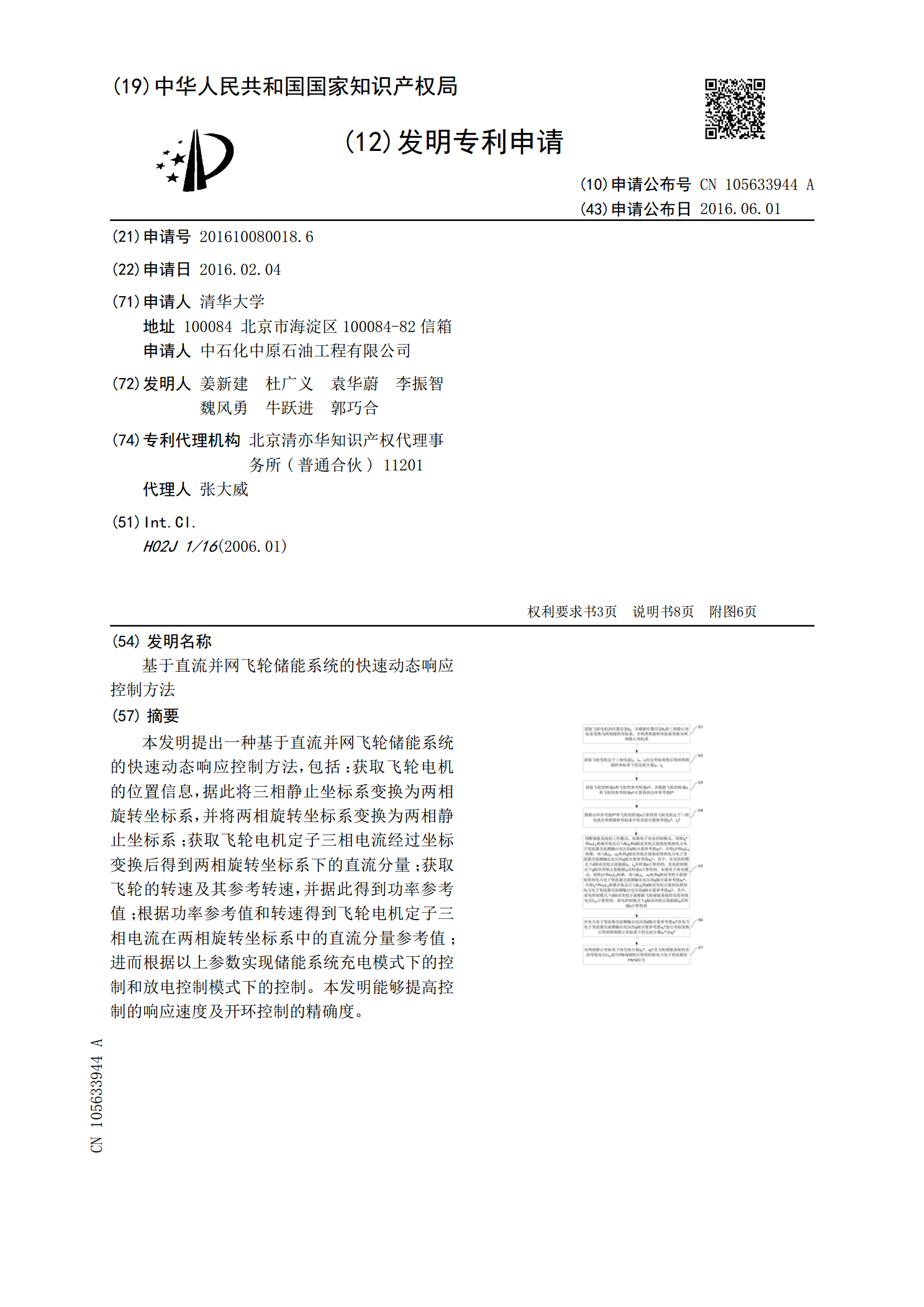
本发明提出一种基于直流并网飞轮储能系统的快速动态响应控制方法,包括:获取飞轮电机的位置信息,据此将三相静止坐标系变换为两相旋转坐标系,并将两相旋转坐标系变换为两相静止坐标系;获取飞轮电机定子三相电流经过坐标变换后得到两相旋转坐标系下的直流分量;获取飞轮的转速及其参考转速,并据此得到功率参考值;根据功率参考值和转速得到飞轮电机定子三相电流在两相旋转坐标系中的直流分量参考值;进而根据以上参数实现储能系统充电模式下的控制和放电控制模式下的控制。本发明能够提高控制的响应速度及开环控制的精确度。
基于交流并网飞轮储能系统的快速动态响应控制方法.pdf
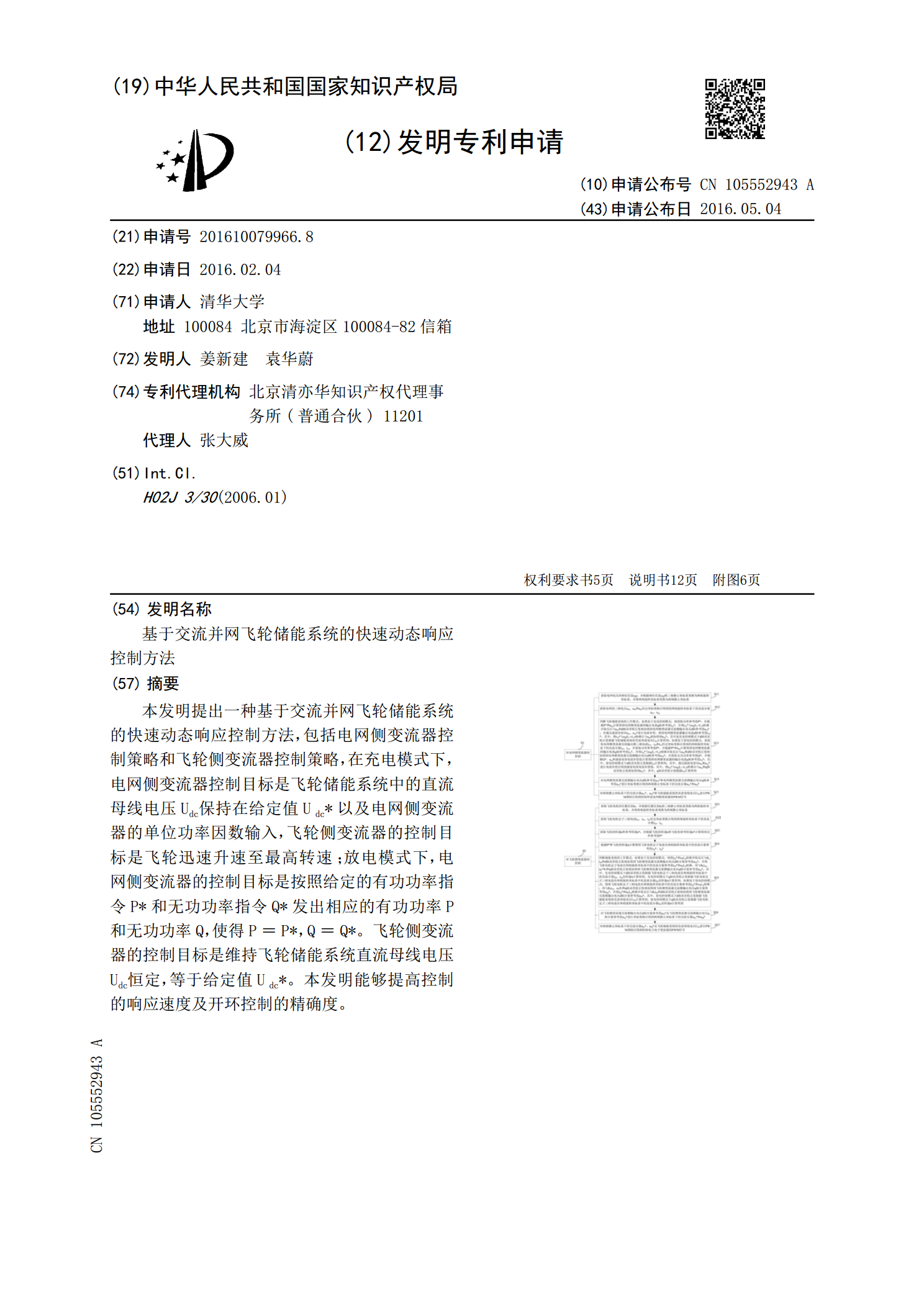
本发明提出一种基于交流并网飞轮储能系统的快速动态响应控制方法,包括电网侧变流器控制策略和飞轮侧变流器控制策略,在充电模式下,电网侧变流器控制目标是飞轮储能系统中的直流母线电压U

基于飞轮储能系统的直流UPS控制方法研究.docx
基于飞轮储能系统的直流UPS控制方法研究基于飞轮储能系统的直流UPS控制方法研究摘要:直流UPS(UninterruptiblePowerSupply)在电力系统中起到了至关重要的作用,其中储能系统是其核心组成部分。本文主要研究基于飞轮储能系统的直流UPS控制方法,包括飞轮储能系统的特点、控制策略和实现方式。通过对该控制方法的研究,可以为直流UPS的运行稳定性和可靠性提供有效的支持。1.引言随着电子设备应用的广泛,在电力系统中需要保证电力供应的连续性和稳定性。直流UPS作为一种常用的备电系统,能够在发生电

一种飞轮储能系统并网控制方法及其储能系统.pdf
一种飞轮储能系统并网控制方法及其储能系统,其电网侧变流器控制方法是将静止坐标系下的电网侧电流ia1、ib1、ic1与变流器侧电流ia2、ib2、ic2分别变换为两相旋转坐标系下的直流分量id1、iq1与id2、iq2,将此两相旋转坐标系下的直流分量作为旋转坐标系下电网侧变流器控制的反馈信号,以控制飞轮储能系统并网有功与无功功率的大小及流向。其电机侧变流器控制方法是将静止坐标系下的电机定子电流ia3、ib3、ic3变换为两相旋转坐标系下的直流分量id3、iq3,将id3、iq3及直流母线电压Udc作为旋转坐

针对并网型风储微网的飞轮储能阵列系统控制方法.docx
针对并网型风储微网的飞轮储能阵列系统控制方法飞轮储能阵列是一种高效、快速响应且具有较长寿命的储能技术,被广泛应用于并网型风储微网系统中。为了保证系统的稳定运行和优化性能,对飞轮储能阵列的控制方法进行研究具有重要意义。本论文将针对并网型风储微网的飞轮储能阵列系统控制方法进行深入研究和探讨。首先,我们需要了解飞轮储能阵列的基本原理和结构。飞轮储能阵列由多个飞轮组成,每个飞轮都通过电动机进行加速,并通过功率电子变流器将其动能转化为电能。飞轮之间通过耦合装置连接,以实现能量的传递和分配。系统中还需配置监测和控制单