
轮差提醒方法和系统.pdf

听云****君哇


1/10

2/10
3/10
4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
轮差提醒方法和系统.pdf
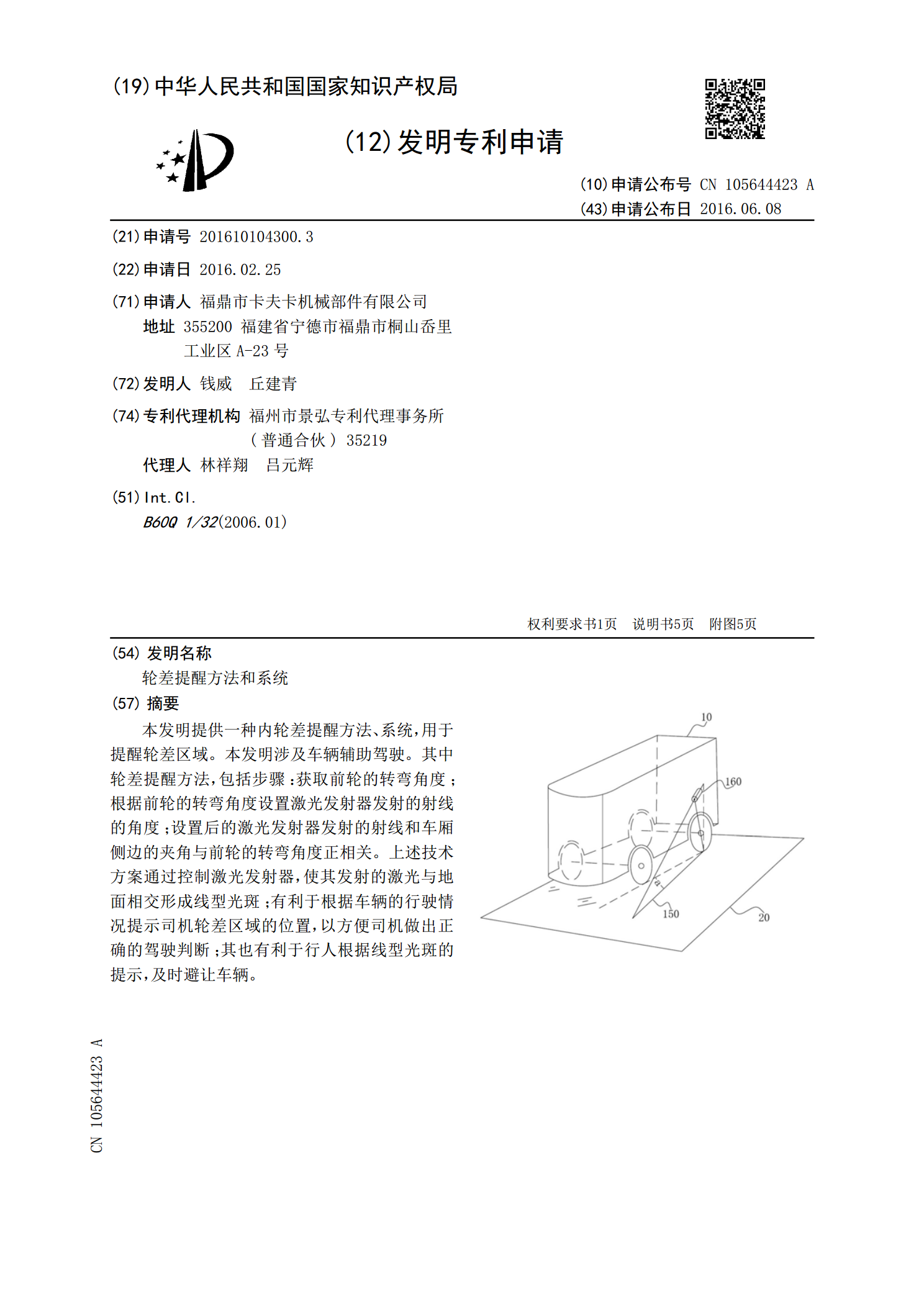
本发明提供一种内轮差提醒方法、系统,用于提醒轮差区域。本发明涉及车辆辅助驾驶。其中轮差提醒方法,包括步骤:获取前轮的转弯角度;根据前轮的转弯角度设置激光发射器发射的射线的角度;设置后的激光发射器发射的射线和车厢侧边的夹角与前轮的转弯角度正相关。上述技术方案通过控制激光发射器,使其发射的激光与地面相交形成线型光斑;有利于根据车辆的行驶情况提示司机轮差区域的位置,以方便司机做出正确的驾驶判断;其也有利于行人根据线型光斑的提示,及时避让车辆。

轴箱振动的轮径差检测系统和方法.pdf
本发明提供了一种基于轴箱振动的轮径差检测系统和方法,该系统包括通信连接的加速度传感器、信号采集器,以及轮径差判别器;其中:加速度传感器布置在轨道车辆的轴箱上,用于采集轴箱的纵向振动信号和横向振动信号,并将纵向振动信号和横向振动信号发送给信号采集器;信号采集器用于根据纵向振动信号和横向振动信号,提取出轴箱的振动特征,并将轴箱的振动特征发送给轮径差判别器;轮径差判别器用于根据轴箱的振动特征,判别同一转向架上的轮对的轮径差类别。本发明中的系统,结构简单,可以方便地测量出轮径差,且整个测量系统受环境影响小,测量准
消息提醒方法和系统.pdf
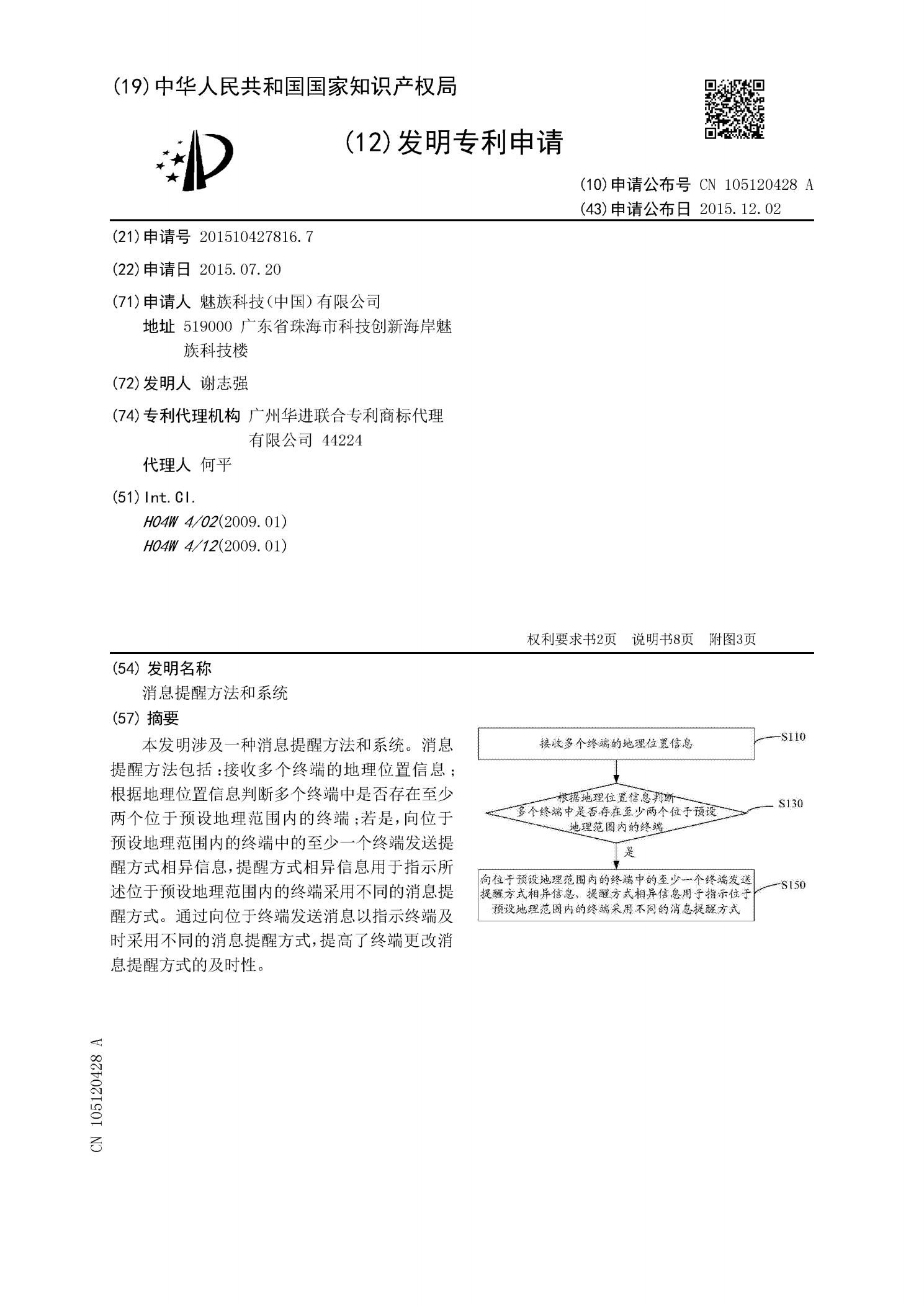
本发明涉及一种消息提醒方法和系统。消息提醒方法包括:接收多个终端的地理位置信息;根据地理位置信息判断多个终端中是否存在至少两个位于预设地理范围内的终端;若是,向位于预设地理范围内的终端中的至少一个终端发送提醒方式相异信息,提醒方式相异信息用于指示所述位于预设地理范围内的终端采用不同的消息提醒方式。通过向位于终端发送消息以指示终端及时采用不同的消息提醒方式,提高了终端更改消息提醒方式的及时性。

监护提醒方法和系统.pdf
本发明公开了一种监护提醒方法和系统,所述方法包括:接收监护人输入的监护目标的当前状态和特征信息;根据所述当前状态,所述特征信息,预先存储的睡眠信息,以及接收所述当前状态和所述特征信息时的系统时间,得到所述监护目标的第一睡眠时刻,以及与所述第一睡眠时刻对应的第一睡眠时间;根据所述第一睡眠时刻和所述第一睡眠时间确定第一监护提醒时间;根据所述第一监护提醒时间发送第一提醒时间设置指令给可视终端。本发明可视终端根据上述提醒时间设置指令设置提醒时间,到提醒时间时,提醒监护人查看监护目标状况,防止监护人休闲娱乐时忘记看
新票提醒方法和系统.pdf
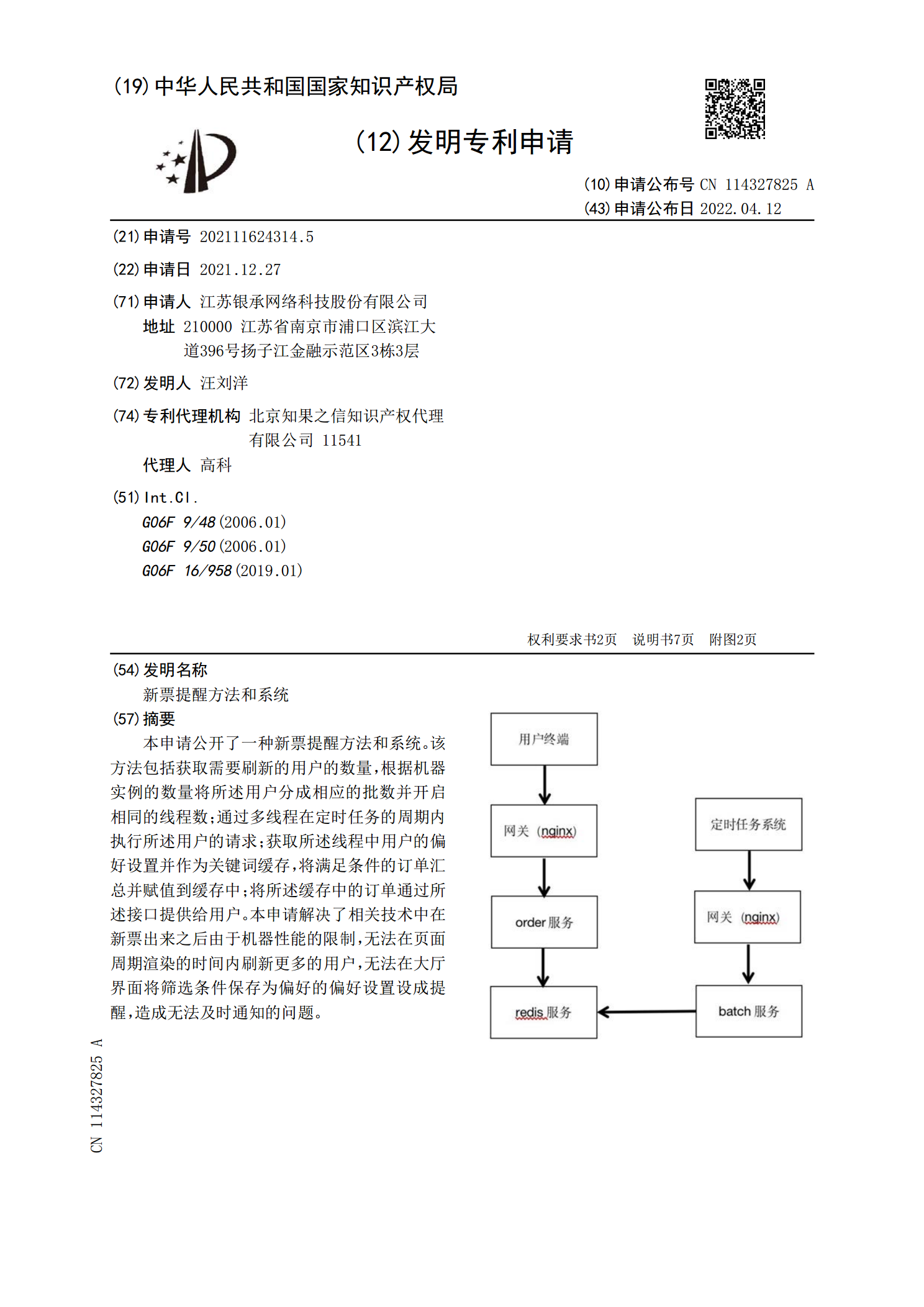
本申请公开了一种新票提醒方法和系统。该方法包括获取需要刷新的用户的数量,根据机器实例的数量将所述用户分成相应的批数并开启相同的线程数;通过多线程在定时任务的周期内执行所述用户的请求;获取所述线程中用户的偏好设置并作为关键词缓存,将满足条件的订单汇总并赋值到缓存中;将所述缓存中的订单通过所述接口提供给用户。本申请解决了相关技术中在新票出来之后由于机器性能的限制,无法在页面周期渲染的时间内刷新更多的用户,无法在大厅界面将筛选条件保存为偏好的偏好设置设成提醒,造成无法及时通知的问题。