
一种采用无人飞行器对大型水域水质进行监测的监测方法.pdf

光誉****君哥


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种采用无人飞行器对大型水域水质进行监测的监测方法.pdf
本发明提供了一种采用无人飞行器对大型水域水质进行监测的监测方法,其首先通过边缘检测提取大型水域的轮廓,在无人飞行器在预定的航线飞行过程中对大型水域进行二次航拍,然后在同一坐标中的两张图像通过帧间差分法并进行二值化处理后得到包含异常灰度值的照片,从而得到水质发生异常的水域的坐标值,并对该水域进行高清航拍后回传地面基站,以进行后期分析处理。通过本发明,可有效降低无人飞行器的无效飞行路径,实现了对大型水域的水质的高效监测,节约了无人飞行器的飞行路线。
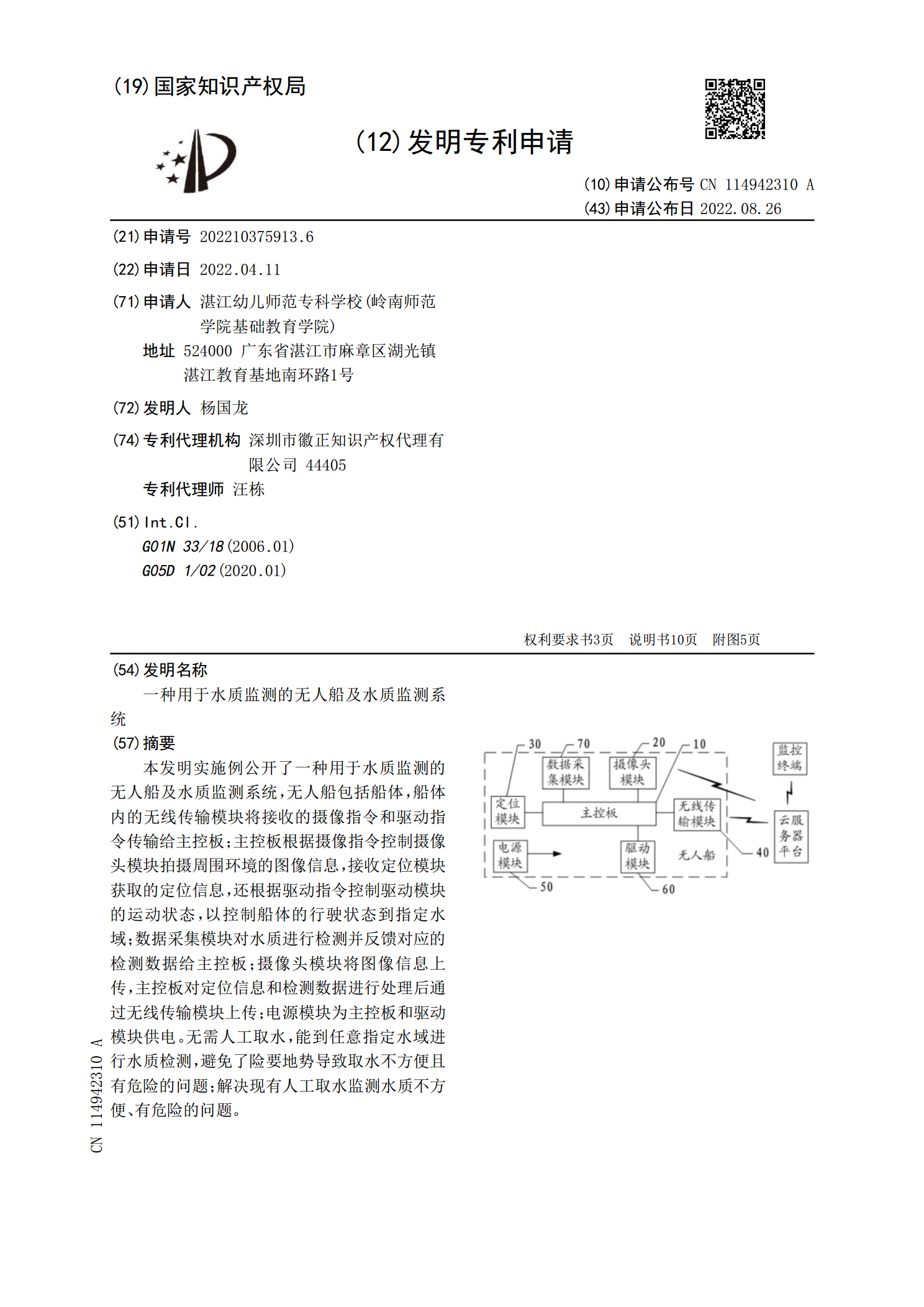
一种用于水质监测的无人船及水质监测系统.pdf
本发明实施例公开了一种用于水质监测的无人船及水质监测系统,无人船包括船体,船体内的无线传输模块将接收的摄像指令和驱动指令传输给主控板;主控板根据摄像指令控制摄像头模块拍摄周围环境的图像信息,接收定位模块获取的定位信息,还根据驱动指令控制驱动模块的运动状态,以控制船体的行驶状态到指定水域;数据采集模块对水质进行检测并反馈对应的检测数据给主控板;摄像头模块将图像信息上传,主控板对定位信息和检测数据进行处理后通过无线传输模块上传;电源模块为主控板和驱动模块供电。无需人工取水,能到任意指定水域进行水质检测,避免了

一种水域环境监测无人艇.pdf
本实用新型属于无人艇技术领域,公开了一种水域环境监测无人艇,包括无人艇本体,所述无人艇本体的内部设有PLC控制器和蓄电池,所述无人艇本体的顶部设有密封盖,所述密封盖的顶部左侧设有无线信号接收器,所述密封盖的顶部右侧固定连接有支撑杆,且支撑杆顶端设有监控探头,所述无人艇本体的右侧固定连接有固定板,且固定板的顶部左侧固定连接有收纳盒,所述收纳盒的内部固定连接有电机,且电机右侧设有的转轴转动连接在收纳盒的内部并延伸到收纳盒的外侧,所述转轴的右端固定连接有齿轮,便于更好的对不同深度的水进行取样,同时可对水域不同位

一种水质监测无人船.pdf
本实用新型公开了一种水质监测无人船,包括船体以及船体底部开设有的月池仓,所述月池仓内可拆卸连接有吊装结构,吊装结构的底部设置有取样盒;取样盒的外形呈圆柱体形状,所述取样盒的上侧边沿沿其圆周方向开设有等角度均匀分布的若干个放置槽,每个放置槽内均可拆卸放置有取样杯,每个取样杯的顶部开设有进水孔,所述取样盒的上侧可拆卸转动设置有盒盖,通过取样盒和水质传感器配合可以实现对水质检测的双重功能,及实时检测的同时,还可以实现对检测处水质样本的留样;隔槽可以实现将两个放置槽分隔开来,避免在盒盖转动过程中,液体发生窜动的情
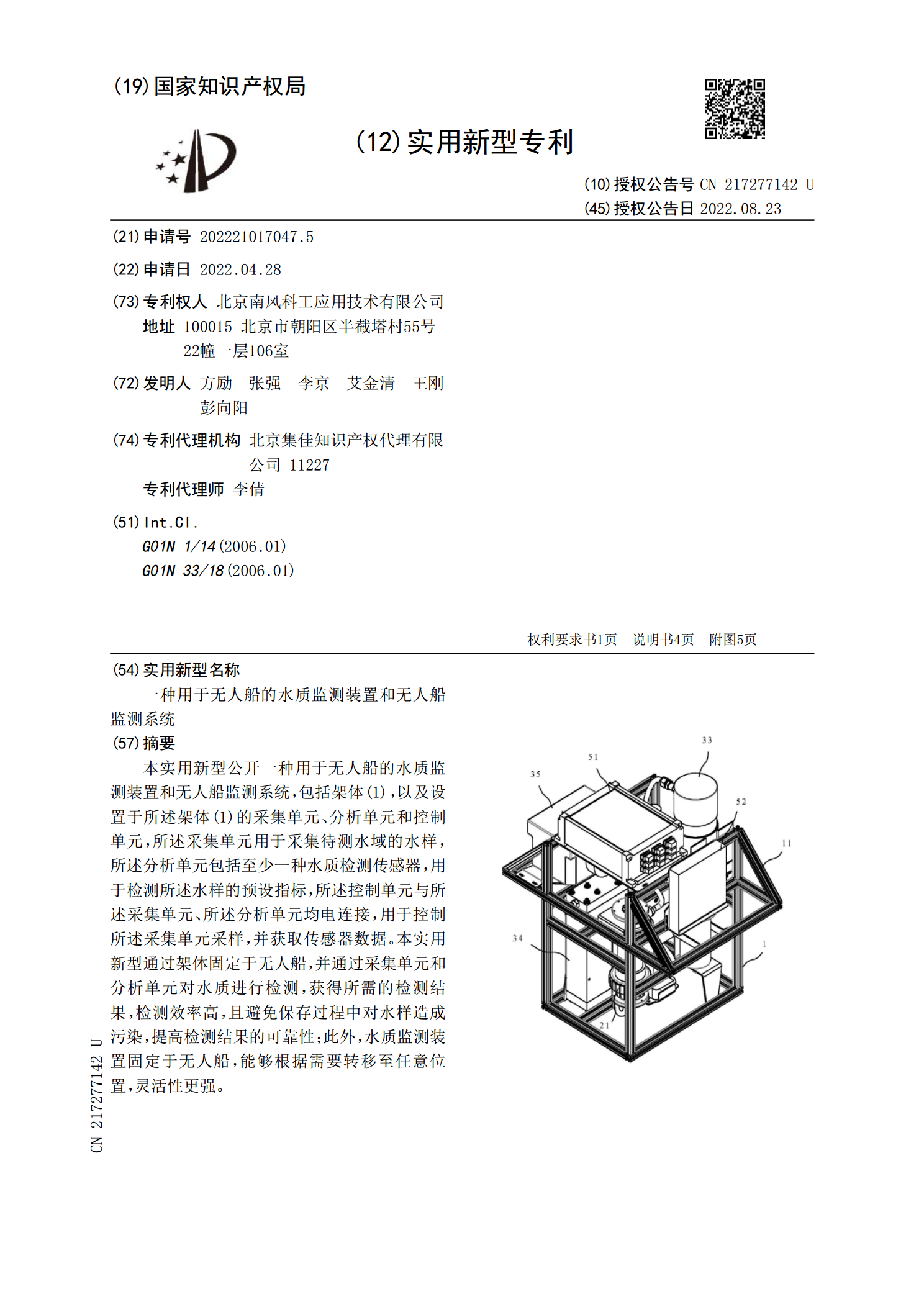
一种用于无人船的水质监测装置和无人船监测系统.pdf
本实用新型公开一种用于无人船的水质监测装置和无人船监测系统,包括架体(1),以及设置于所述架体(1)的采集单元、分析单元和控制单元,所述采集单元用于采集待测水域的水样,所述分析单元包括至少一种水质检测传感器,用于检测所述水样的预设指标,所述控制单元与所述采集单元、所述分析单元均电连接,用于控制所述采集单元采样,并获取传感器数据。本实用新型通过架体固定于无人船,并通过采集单元和分析单元对水质进行检测,获得所需的检测结果,检测效率高,且避免保存过程中对水样造成污染,提高检测结果的可靠性;此外,水质监测装置固定