
一种水下机器人重心调节装置.pdf

Jo****34

1/7
2/7
3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种水下机器人重心调节装置.pdf
本发明提供了一种水下机器人重心调节装置,包括外壳后端盖和外壳前端盖,外壳前端盖和外壳后端盖分别安装在外壳的前后两个端面,玻璃前罩安装在外壳前端盖的前端,本装置还包括前支撑板和后支撑板,前支撑板安装在外壳前端盖后侧,后支撑板安装在外壳后端盖前侧,丝杆的前后两端分别安装在前支撑板和后支撑板上,丝杆的前端通过同步轮及同步带与步进电机连接,直线滑杆安装在丝杆的下方,滑块安装在丝杆上,直线滑杆穿过滑块,电池箱安装在滑块的下端,电池箱箱体外侧配有配重碟,电池箱通过螺旋电源线管与步进电机连接。本发明将水下机器人电池箱充

一种作业型水下机器人重心调节装置.pdf
本发明提供一种作业型水下机器人重心调节装置,涉及水下机器人应用领域,旨在为水下机器人系统提供一种可靠的有效的重心调节装置,以平衡水下机器人系统作业时因机械手展开而产生的倾覆力矩或调节水下机器人的运动姿态,通过步进电机经一级锥齿轮传动,利用丝杠螺母传动原理调节重块的位置,位置检测传感器随重块一同运动,可以实时检测重块在密封筒体内的位置。本发明充分利用了水下机器人本体内部的有效空间,可以用于控制水下机器人的作业平衡与运动姿态,实现水下机器人的俯仰姿态控制或横滚姿态控制,且具有体积小,结构紧凑、可靠,调节精度高

一种水下机器人浮力调节装置.pdf
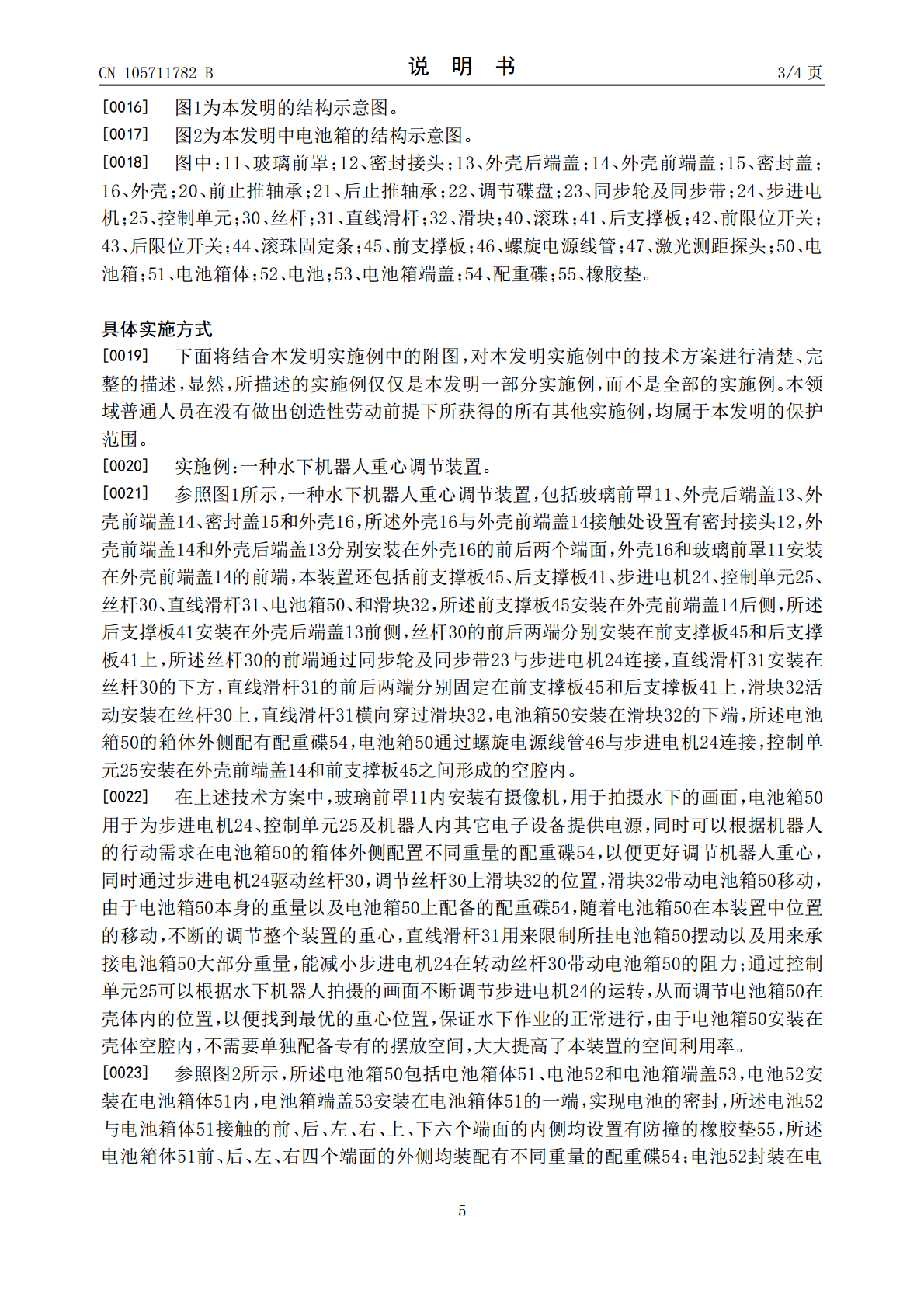
本发明涉及水下机器人的配套设备,具体地说是一种水下机器人浮力调节装置,包括载体外壳、端盖、内皮囊、外皮囊、直流电机、齿轮泵及阀组,载体外壳的两端分别连接有端盖、共同形成密封舱,内皮囊、直流电机、齿轮泵及阀组分别安装在密封舱内;齿轮泵通过直流电机驱动工作,齿轮泵的出油口串联单向阀、过滤器后接至阀组,齿轮泵的吸油口通过管路与阀组直联;内、外皮囊的油口分别通过管路与阀组连接;外皮囊的体积通过齿轮泵向内注油而增大、浮力增加,外皮囊的液压油通过水压或齿轮泵吸油流向内皮囊,外皮囊体积缩小、浮力减小。本发明简单可靠,功
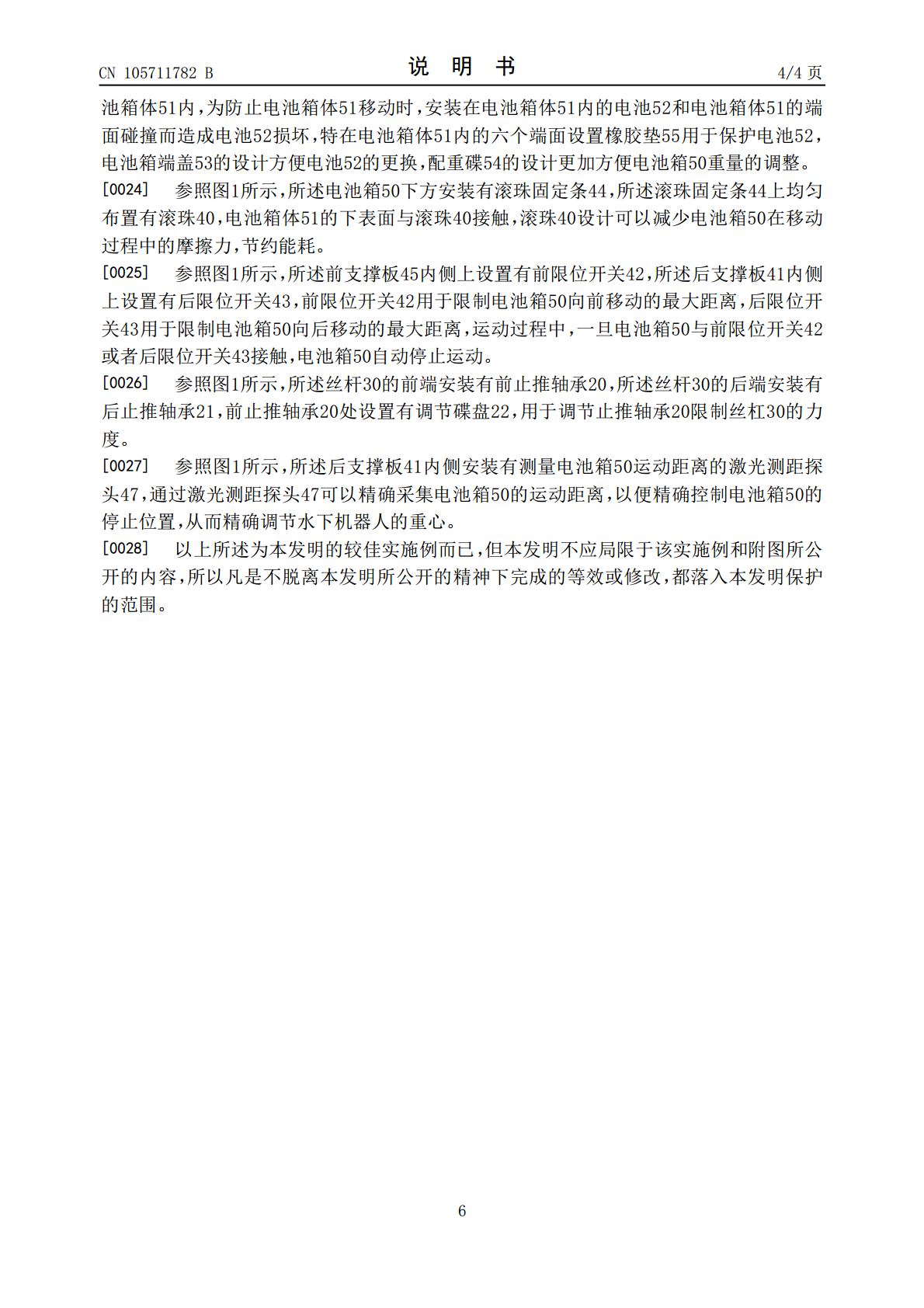
一种水下机器人用质心调节装置.pdf
本发明属于水下机器人领域,具体地说是一种水下机器人用质心调节装置,利用水下机器人的偏心电池组作为本发明的质量块,通过俯仰驱动装置的俯仰蜗轮、俯仰蜗杆及齿轮齿条做啮合传动,使偏心电池组在方管轴上滑动,从而实现质心调节装置调节质心在沿其轴线方向运动;通过横倾调节装置的横倾蜗轮与横倾蜗杆做啮合转动,带动方管轴及偏心电池组做旋转运动,由于偏心电池组的质心与方管轴的轴线存在偏心,从而实现了整个质心调节装置质心绕其轴线的回转运动,这样实现了整个水下机器人系统的俯仰与横倾调节功能。本发明满足水下机器人结构紧凑,能耗小,

一种水下机器人用能够调节排水的调节装置.pdf
本发明公开了一种水下机器人用能够调节排水的调节装置,包括第一平衡板和第二平衡板,所述第一平衡板的左侧固定有基板,且基板的左侧设置有铰链,所述第二平衡板的右侧固定有尾板,且第一平衡板与第二平衡板之间安装有连接中枢,该水下机器人用便于调节重力与浮力的装置通过架杆和连接螺栓将重力调节板每三个拼接成一组,在第一平衡板与第二平衡板中各自形成两个重力调节板块,利用连杆对各个重力调节板的支撑作用,以及通过连接栓对各个连杆在第一平衡板与第二平衡板上的配合关系,使由重力调节板组成的重力调节板块自身承载面积能够得到调节变化,