
基于SPSA的电力系统单区域负荷频率的数据驱动控制方法.pdf

一吃****永贺

1/10
2/10
3/10
4/10

5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于SPSA的电力系统单区域负荷频率的数据驱动控制方法.pdf
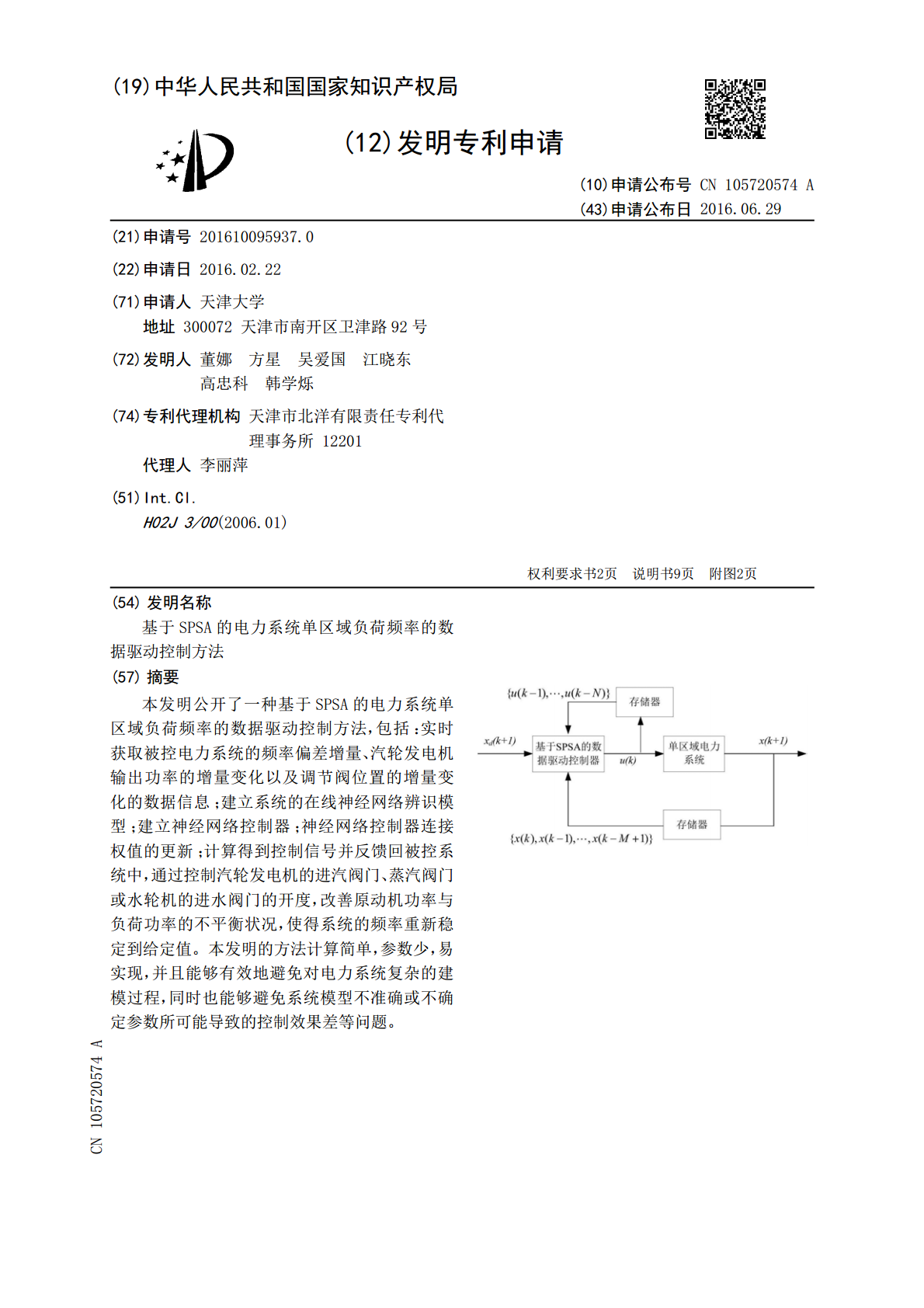
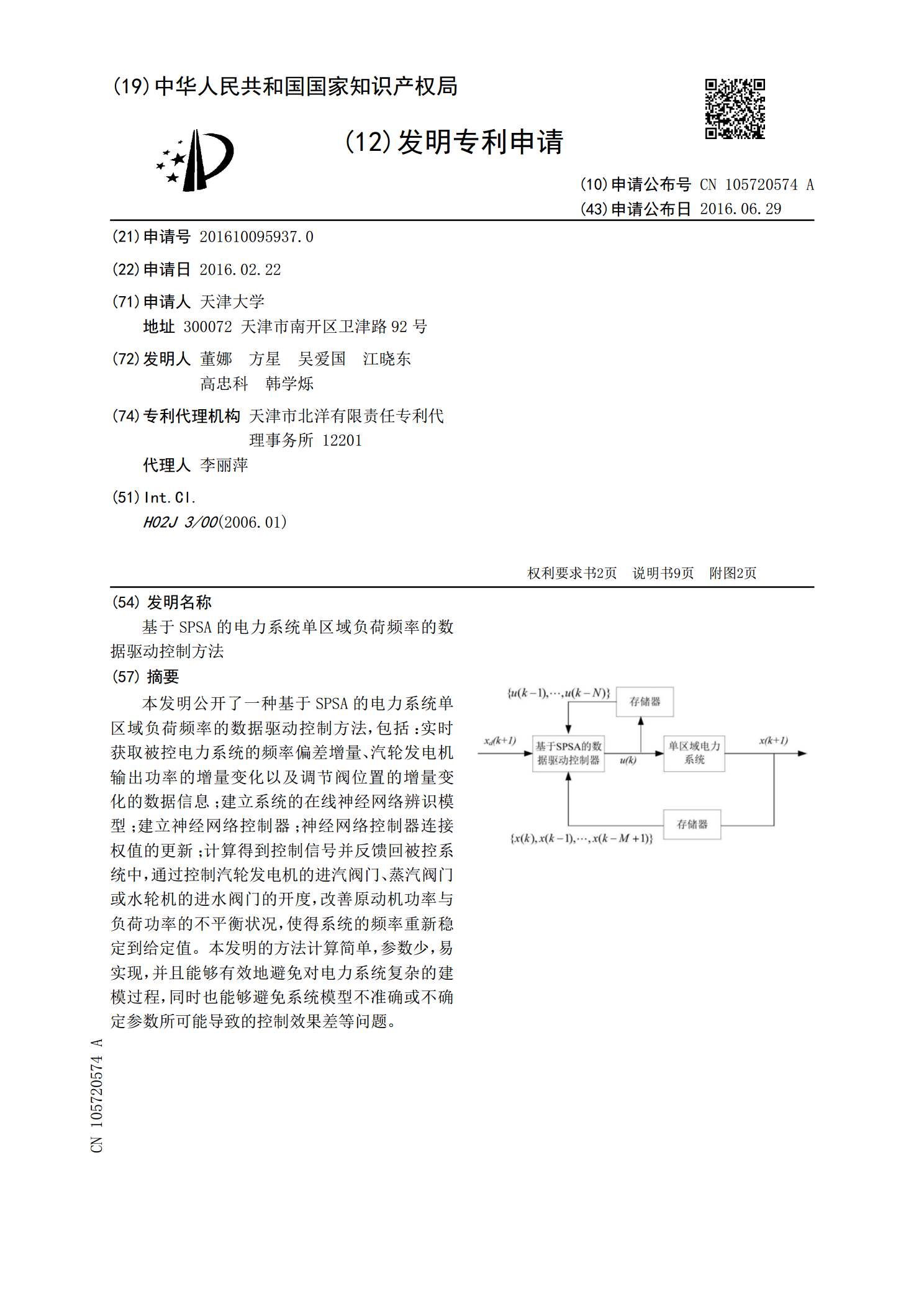
本发明公开了一种基于SPSA的电力系统单区域负荷频率的数据驱动控制方法,包括:实时获取被控电力系统的频率偏差增量、汽轮发电机输出功率的增量变化以及调节阀位置的增量变化的数据信息;建立系统的在线神经网络辨识模型;建立神经网络控制器;神经网络控制器连接权值的更新;计算得到控制信号并反馈回被控系统中,通过控制汽轮发电机的进汽阀门、蒸汽阀门或水轮机的进水阀门的开度,改善原动机功率与负荷功率的不平衡状况,使得系统的频率重新稳定到给定值。本发明的方法计算简单,参数少,易实现,并且能够有效地避免对电力系统复杂的建模过程

基于神经网络的数据驱动互联电力系统负荷频率控制.docx
基于神经网络的数据驱动互联电力系统负荷频率控制基于神经网络的数据驱动互联电力系统负荷频率控制摘要:随着电力系统的规模不断扩大和智能化的发展,负荷频率控制成为电力系统中至关重要的问题。传统的负荷频率控制方法往往面临着不准确、计算量大等问题,难以适应大规模电力系统的需求。本文提出了基于神经网络的数据驱动互联电力系统负荷频率控制方法。通过建立负荷频率控制模型,将系统实时数据与神经网络进行训练和学习,实现对电力系统负荷频率的精确预测和合理控制。该方法的优势在于可以通过大量的历史数据进行训练,提高了预测精度和控制效
单区域PI型负荷频率控制的时滞电力系统稳定性分析方法.pdf
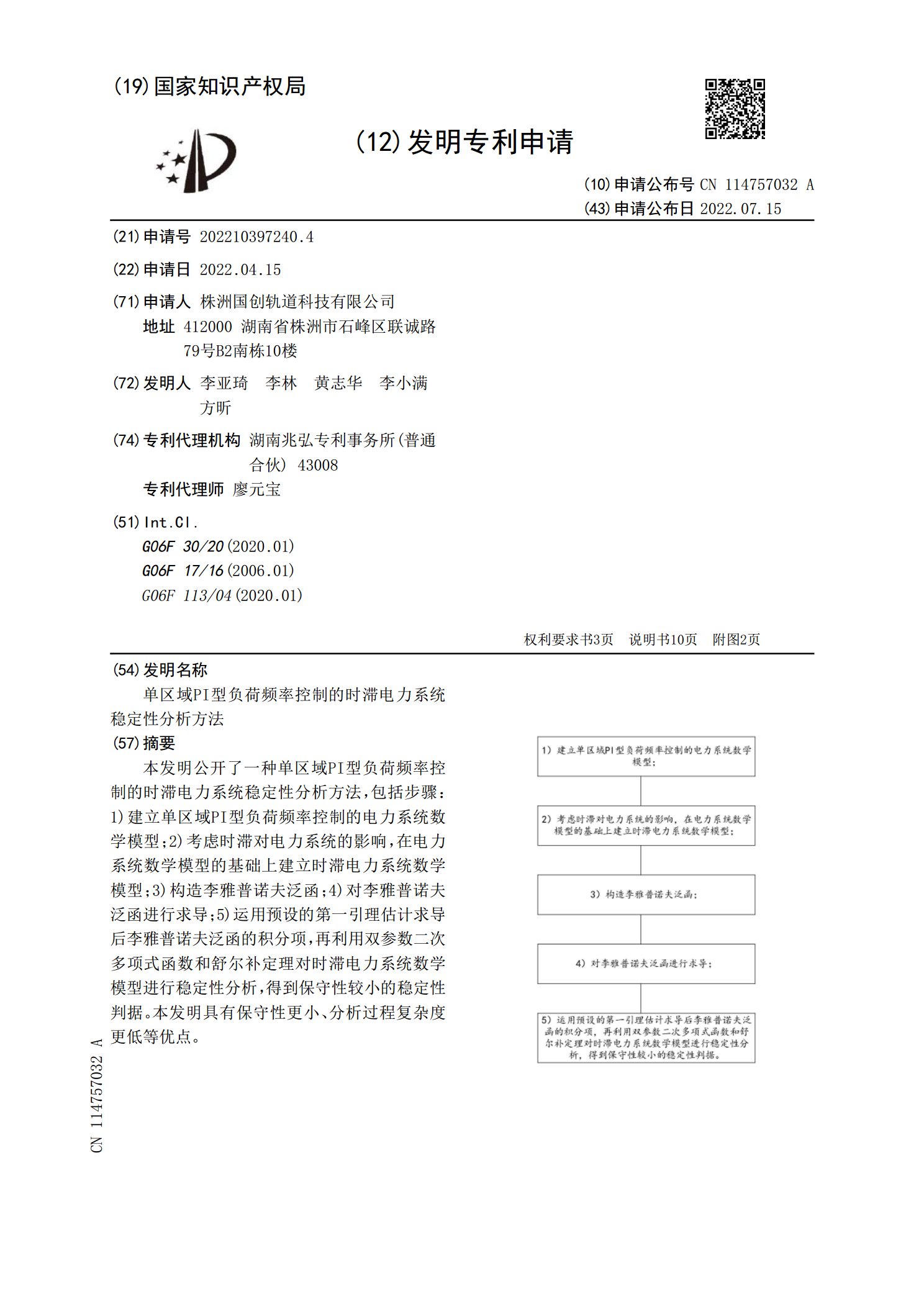
本发明公开了一种单区域PI型负荷频率控制的时滞电力系统稳定性分析方法,包括步骤:1)建立单区域PI型负荷频率控制的电力系统数学模型;2)考虑时滞对电力系统的影响,在电力系统数学模型的基础上建立时滞电力系统数学模型;3)构造李雅普诺夫泛函;4)对李雅普诺夫泛函进行求导;5)运用预设的第一引理估计求导后李雅普诺夫泛函的积分项,再利用双参数二次多项式函数和舒尔补定理对时滞电力系统数学模型进行稳定性分析,得到保守性较小的稳定性判据。本发明具有保守性更小、分析过程复杂度更低等优点。

多区域互联电力系统负荷频率控制研究.docx
多区域互联电力系统负荷频率控制研究多区域互联电力系统负荷频率控制研究摘要:随着电力系统规模的不断扩大和电力交互的增加,多区域互联电力系统的工作频率控制成为了电力系统运行的重要问题。本论文首先介绍了多区域互联电力系统的概念和特点,然后分析了负荷频率控制的目标和挑战,并综述了国内外在这一领域的研究进展。接下来,本论文提出了一种基于协同控制的负荷频率控制策略,并对其进行了仿真实验和分析。最后,本论文总结了研究结果,提出了下一步的研究方向。关键词:多区域互联电力系统、负荷频率控制、协同控制、仿真实验1.引言随着经

基于MPC算法的电力系统负荷频率控制.docx
基于MPC算法的电力系统负荷频率控制基于MPC算法的电力系统负荷频率控制摘要:随着电力系统规模的不断扩大和复杂性的增加,负荷频率控制成为电力系统运行的重要问题。本文基于MPC(ModelPredictiveControl)算法,探讨了其在电力系统负荷频率控制中的应用,并分析了其优势和可能面临的挑战。通过对算法的原理和实施过程的详细介绍,论文描述了基于MPC算法的电力系统负荷频率控制的工作流程。最后,通过实验结果的分析,验证了MPC算法在电力系统负荷频率控制中的有效性和可行性。关键词:电力系统,负荷频率控制