
一种基于多尺度不变量描述的目标识别方法及装置.pdf

爱欢****23

1/10
2/10
3/10

4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于多尺度不变量描述的目标识别方法及装置.pdf
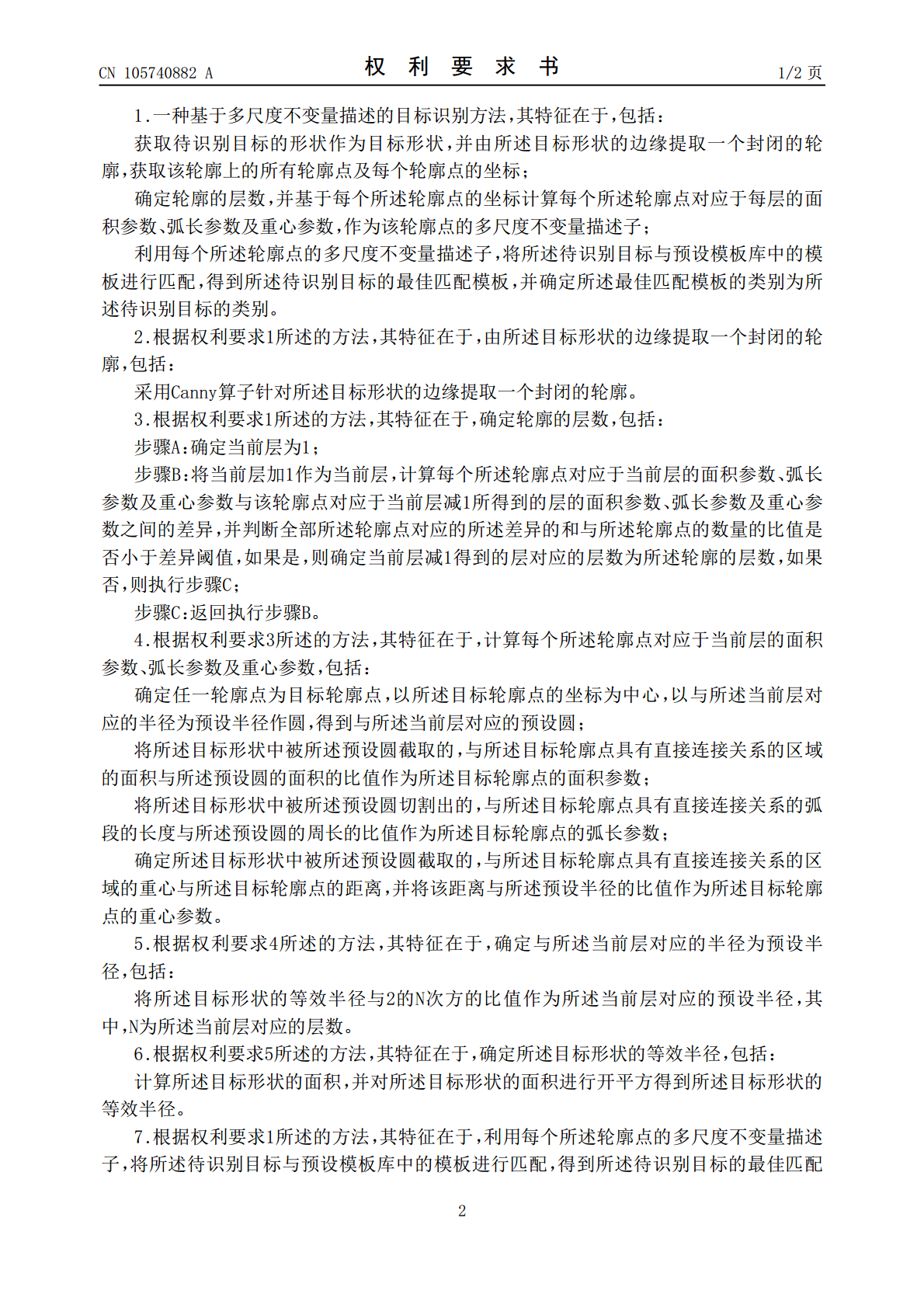
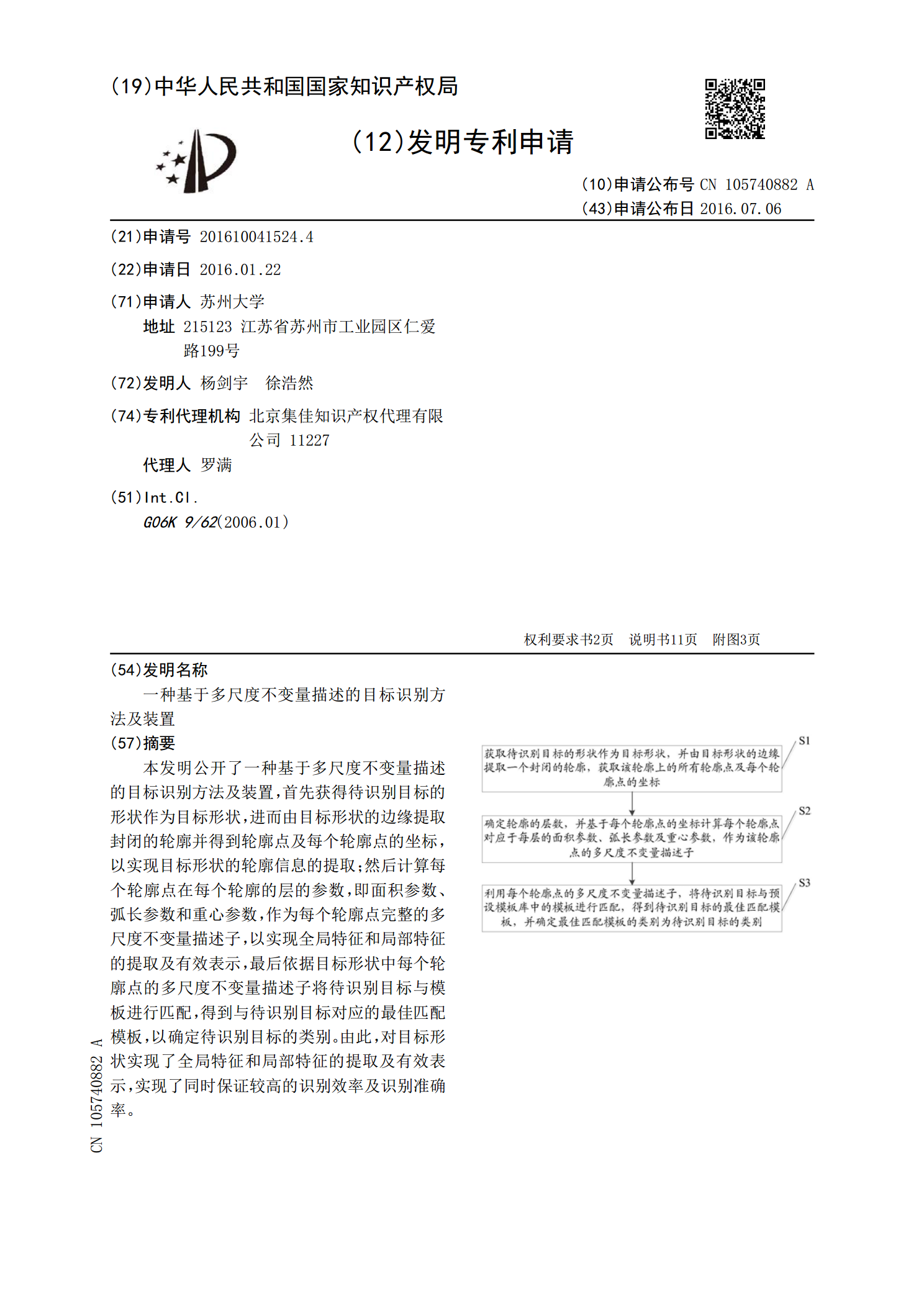
本发明公开了一种基于多尺度不变量描述的目标识别方法及装置,首先获得待识别目标的形状作为目标形状,进而由目标形状的边缘提取封闭的轮廓并得到轮廓点及每个轮廓点的坐标,以实现目标形状的轮廓信息的提取;然后计算每个轮廓点在每个轮廓的层的参数,即面积参数、弧长参数和重心参数,作为每个轮廓点完整的多尺度不变量描述子,以实现全局特征和局部特征的提取及有效表示,最后依据目标形状中每个轮廓点的多尺度不变量描述子将待识别目标与模板进行匹配,得到与待识别目标对应的最佳匹配模板,以确定待识别目标的类别。由此,对目标形状实现了全局
基于多尺度网络的水印识别方法、装置、设备及存储介质.pdf
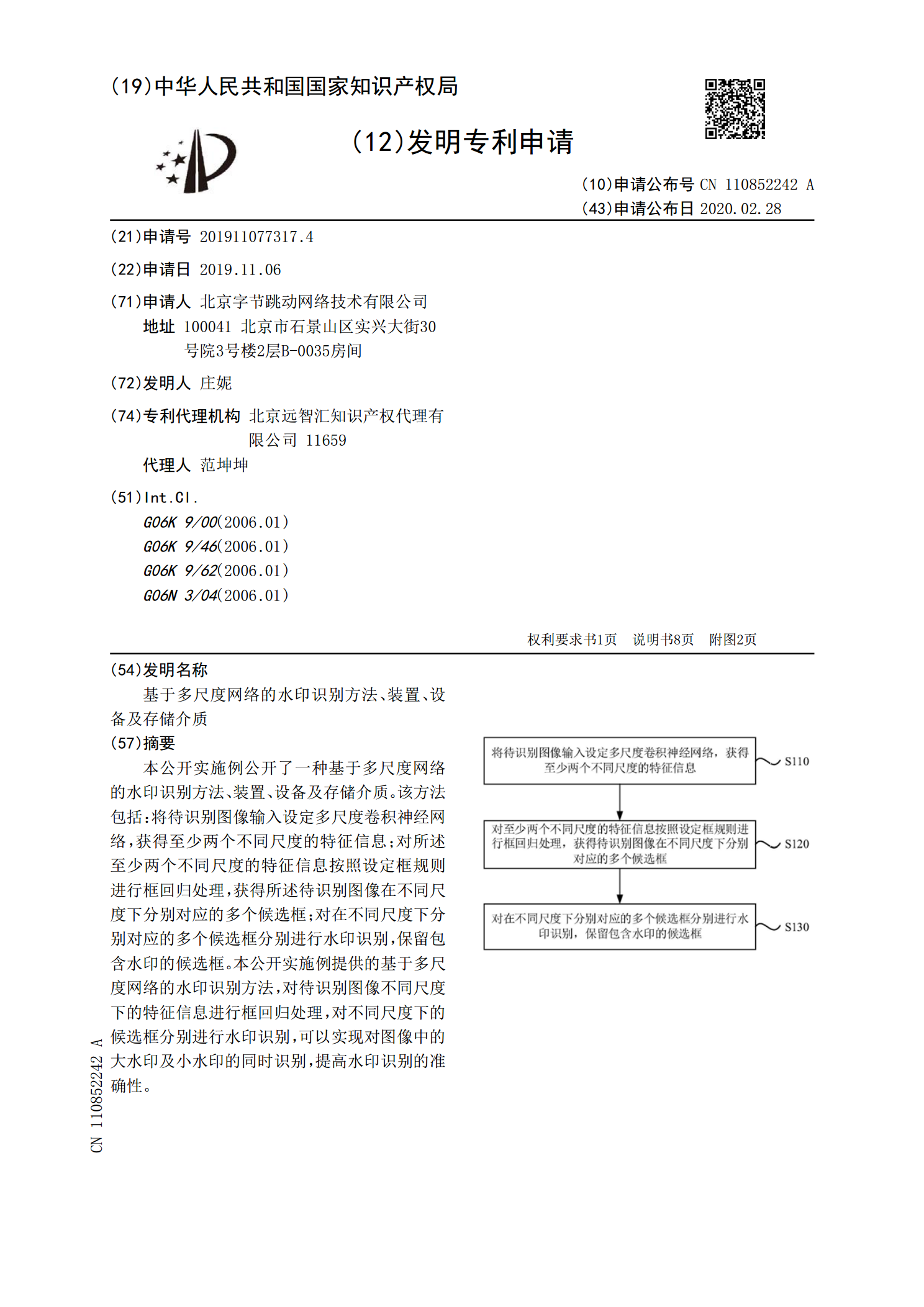
本公开实施例公开了一种基于多尺度网络的水印识别方法、装置、设备及存储介质。该方法包括:将待识别图像输入设定多尺度卷积神经网络,获得至少两个不同尺度的特征信息;对所述至少两个不同尺度的特征信息按照设定框规则进行框回归处理,获得所述待识别图像在不同尺度下分别对应的多个候选框;对在不同尺度下分别对应的多个候选框分别进行水印识别,保留包含水印的候选框。本公开实施例提供的基于多尺度网络的水印识别方法,对待识别图像不同尺度下的特征信息进行框回归处理,对不同尺度下的候选框分别进行水印识别,可以实现对图像中的大水印及小水
一种基于多尺度卷积胶囊网络的雷达目标识别方法.pdf
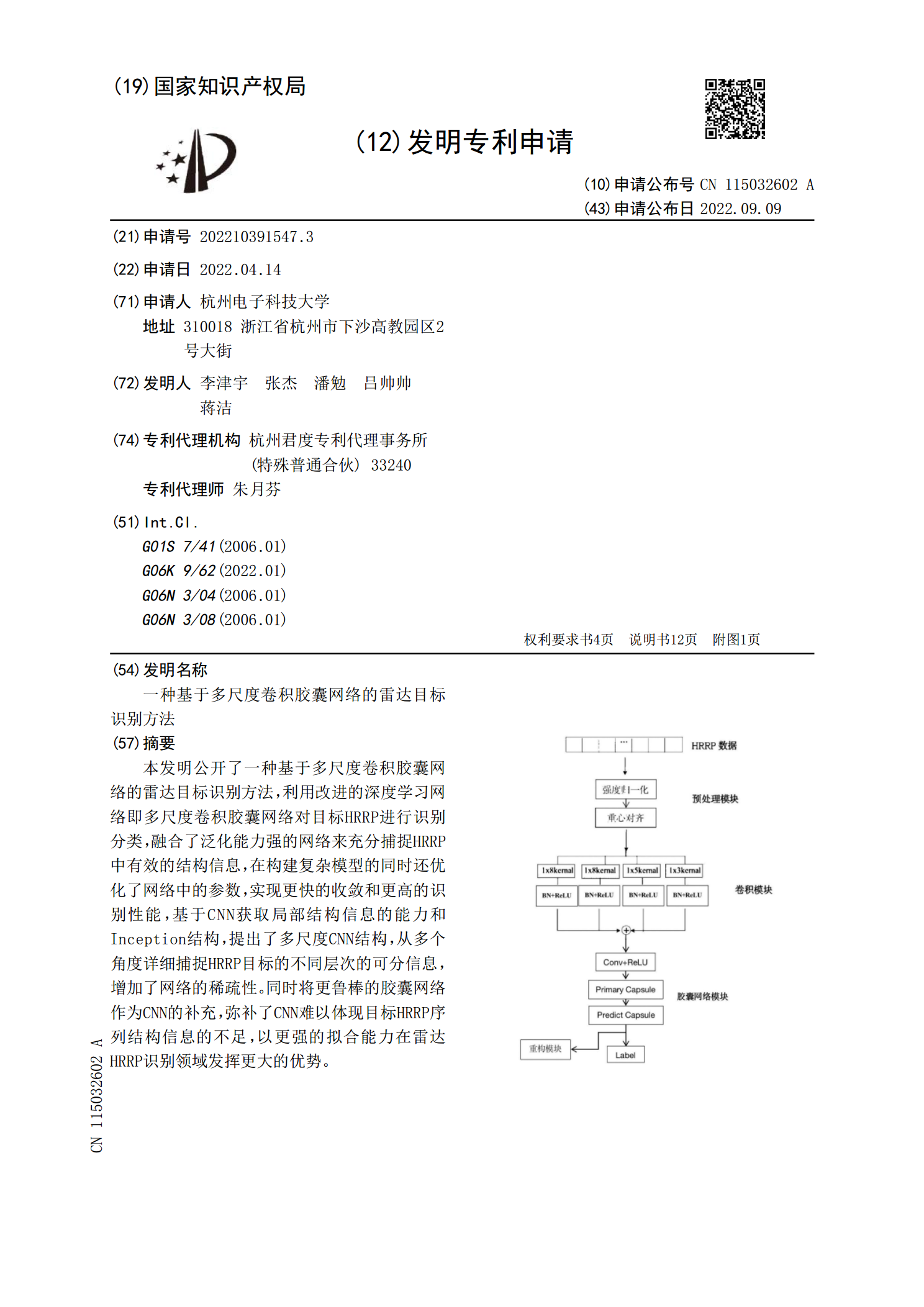
本发明公开了一种基于多尺度卷积胶囊网络的雷达目标识别方法,利用改进的深度学习网络即多尺度卷积胶囊网络对目标HRRP进行识别分类,融合了泛化能力强的网络来充分捕捉HRRP中有效的结构信息,在构建复杂模型的同时还优化了网络中的参数,实现更快的收敛和更高的识别性能,基于CNN获取局部结构信息的能力和Inception结构,提出了多尺度CNN结构,从多个角度详细捕捉HRRP目标的不同层次的可分信息,增加了网络的稀疏性。同时将更鲁棒的胶囊网络作为CNN的补充,弥补了CNN难以体现目标HRRP序列结构信息的不足,以更
一种基于多尺度特征融合的行人重识别方法.pdf
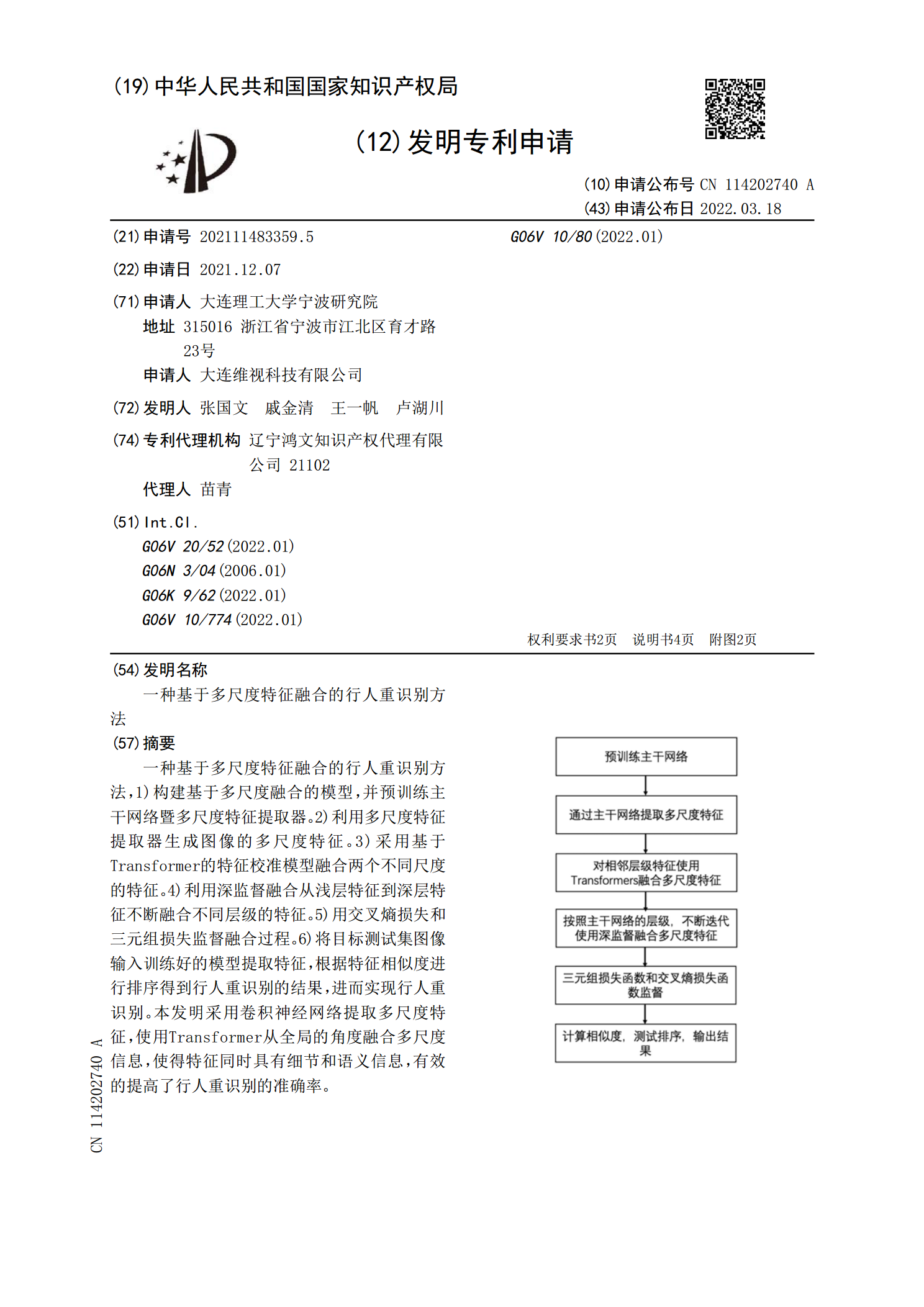
一种基于多尺度特征融合的行人重识别方法,1)构建基于多尺度融合的模型,并预训练主干网络暨多尺度特征提取器。2)利用多尺度特征提取器生成图像的多尺度特征。3)采用基于Transformer的特征校准模型融合两个不同尺度的特征。4)利用深监督融合从浅层特征到深层特征不断融合不同层级的特征。5)用交叉熵损失和三元组损失监督融合过程。6)将目标测试集图像输入训练好的模型提取特征,根据特征相似度进行排序得到行人重识别的结果,进而实现行人重识别。本发明采用卷积神经网络提取多尺度特征,使用Transformer从全局的
基于几何重构和多尺度分析的目标识别方法.pdf
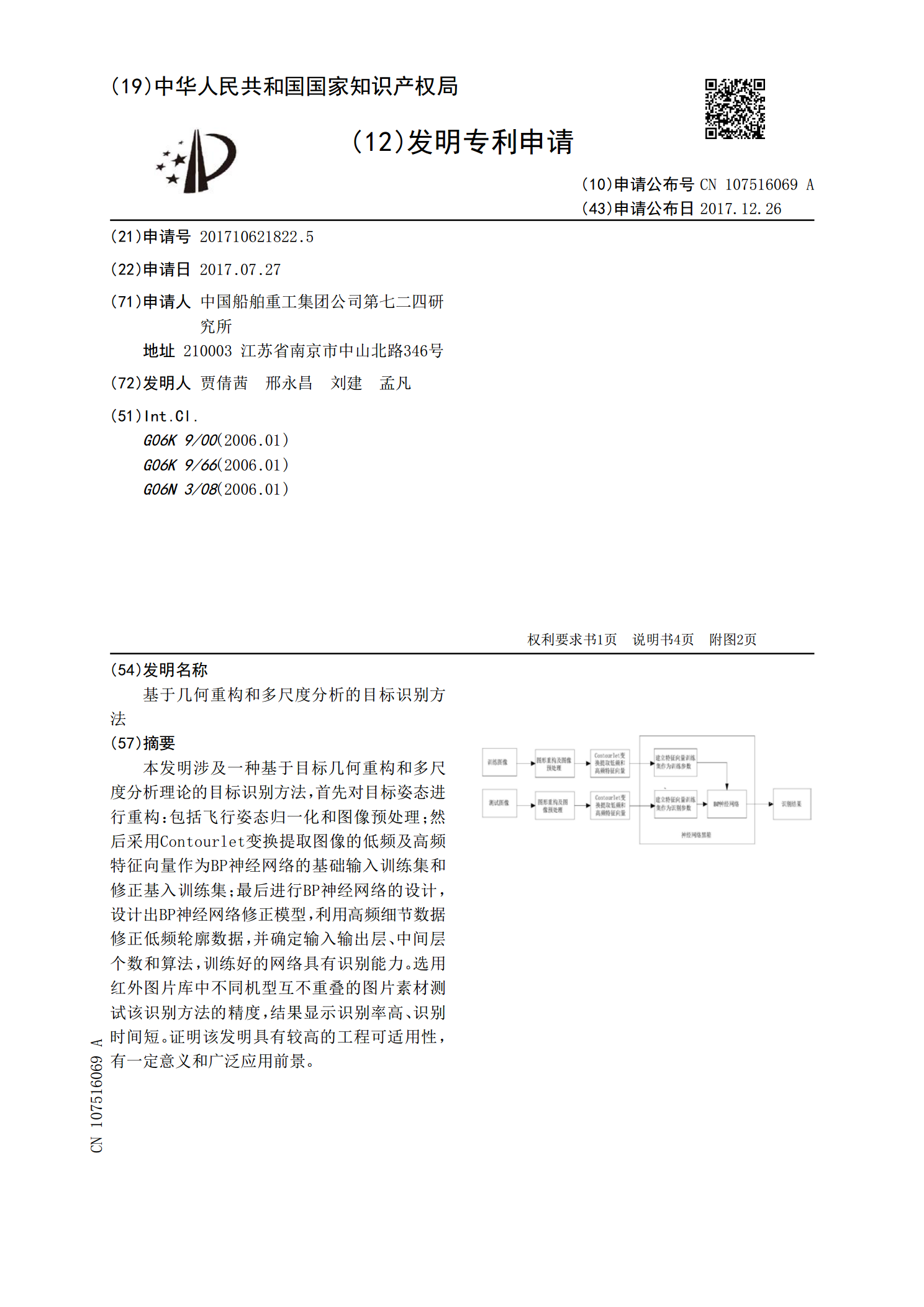
本发明涉及一种基于目标几何重构和多尺度分析理论的目标识别方法,首先对目标姿态进行重构:包括飞行姿态归一化和图像预处理;然后采用Contourlet变换提取图像的低频及高频特征向量作为BP神经网络的基础输入训练集和修正基入训练集;最后进行BP神经网络的设计,设计出BP神经网络修正模型,利用高频细节数据修正低频轮廓数据,并确定输入输出层、中间层个数和算法,训练好的网络具有识别能力。选用红外图片库中不同机型互不重叠的图片素材测试该识别方法的精度,结果显示识别率高、识别时间短。证明该发明具有较高的工程可适用性,有