
一种倾斜式踏步训练系统.pdf

一只****写意

1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种倾斜式踏步训练系统.pdf
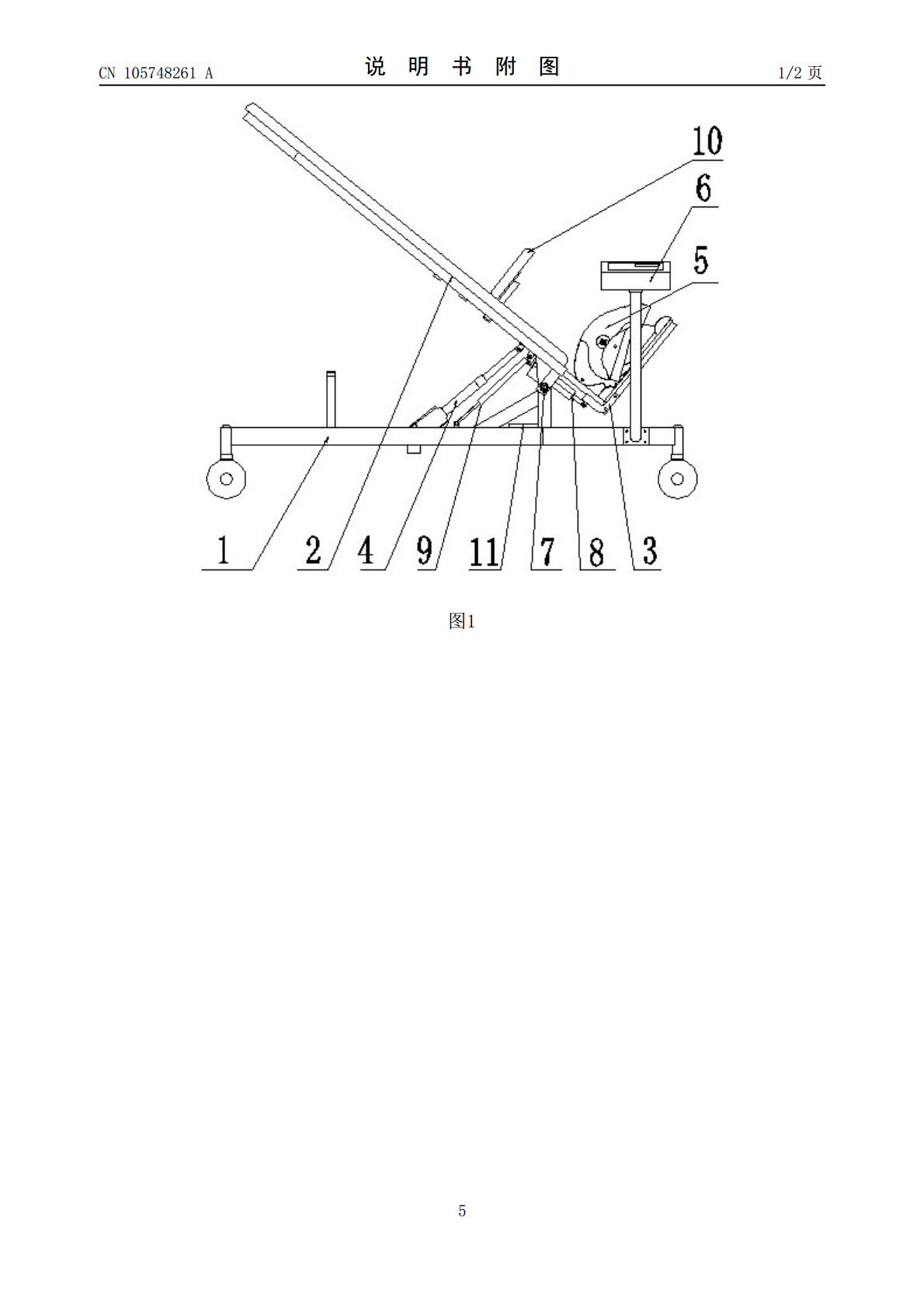
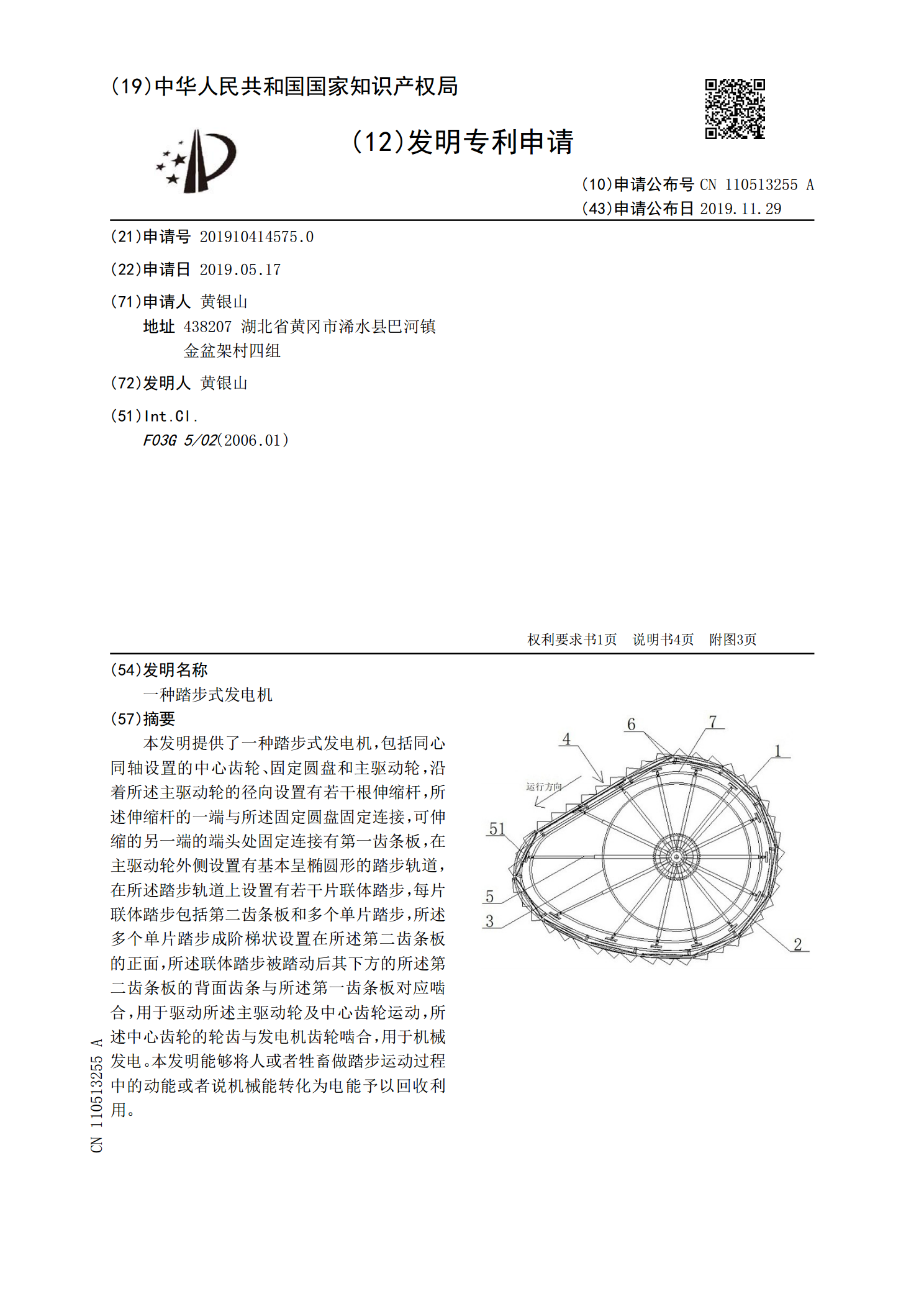
一种倾斜式踏步训练系统涉及一种医疗康复训练器材。本训练系统底座下安有四个带有自锁功能的万向脚轮,床架由床面水平支架和床面回转机构组成,床架在电动推杆的驱动下可以作0?90°的旋转,足踏板调节装置两侧设置有导轨,分别连接在床架两侧,电动推杆一段铰接在踏板架下方,另一端铰接在床板上,下肢运动训练装置内部设置有步进电机用以驱动脚踏板座进行往复运动,脚踏板设置在步进电机旋转轴两端,控制装置采用计算机中心控制,上边设置有显示屏和操作面板。本发明在使用时能够通过电动推杆调节床架倾斜功能实现人体不同程度的减重,在减重状
一种踏步式发电机.pdf
本发明提供了一种踏步式发电机,包括同心同轴设置的中心齿轮、固定圆盘和主驱动轮,沿着所述主驱动轮的径向设置有若干根伸缩杆,所述伸缩杆的一端与所述固定圆盘固定连接,可伸缩的另一端的端头处固定连接有第一齿条板,在主驱动轮外侧设置有基本呈椭圆形的踏步轨道,在所述踏步轨道上设置有若干片联体踏步,每片联体踏步包括第二齿条板和多个单片踏步,所述多个单片踏步成阶梯状设置在所述第二齿条板的正面,所述联体踏步被踏动后其下方的所述第二齿条板的背面齿条与所述第一齿条板对应啮合,用于驱动所述主驱动轮及中心齿轮运动,所述中心齿轮的轮

一种闹钟式踏步机.pdf
本发明涉及闹钟领域,公开了一种闹钟式踏步机,包括底座闹钟式踏步机、踏板组闹钟式踏步机、踏板支架闹钟式踏步机、阻力元件闹钟式踏步机、油压缸、电源、定时器闹钟式踏步机、声音模块闹钟式踏步机及压力开关,其中,所述压力开关设于所述踏板组闹钟式踏步机下方,所述电源、定时器闹钟式踏步机、声音模块闹钟式踏步机、压力开关连成闹钟回路,所述踏板组闹钟式踏步机下踏动作控制所述压力开关由闭合变为断开。本发明的闹钟式踏步机在闹钟铃声响起后,利用脚踏踏步机踏板来实现关闭闹钟提醒功能,结构合理、美观实用,具有良好的叫醒效果。
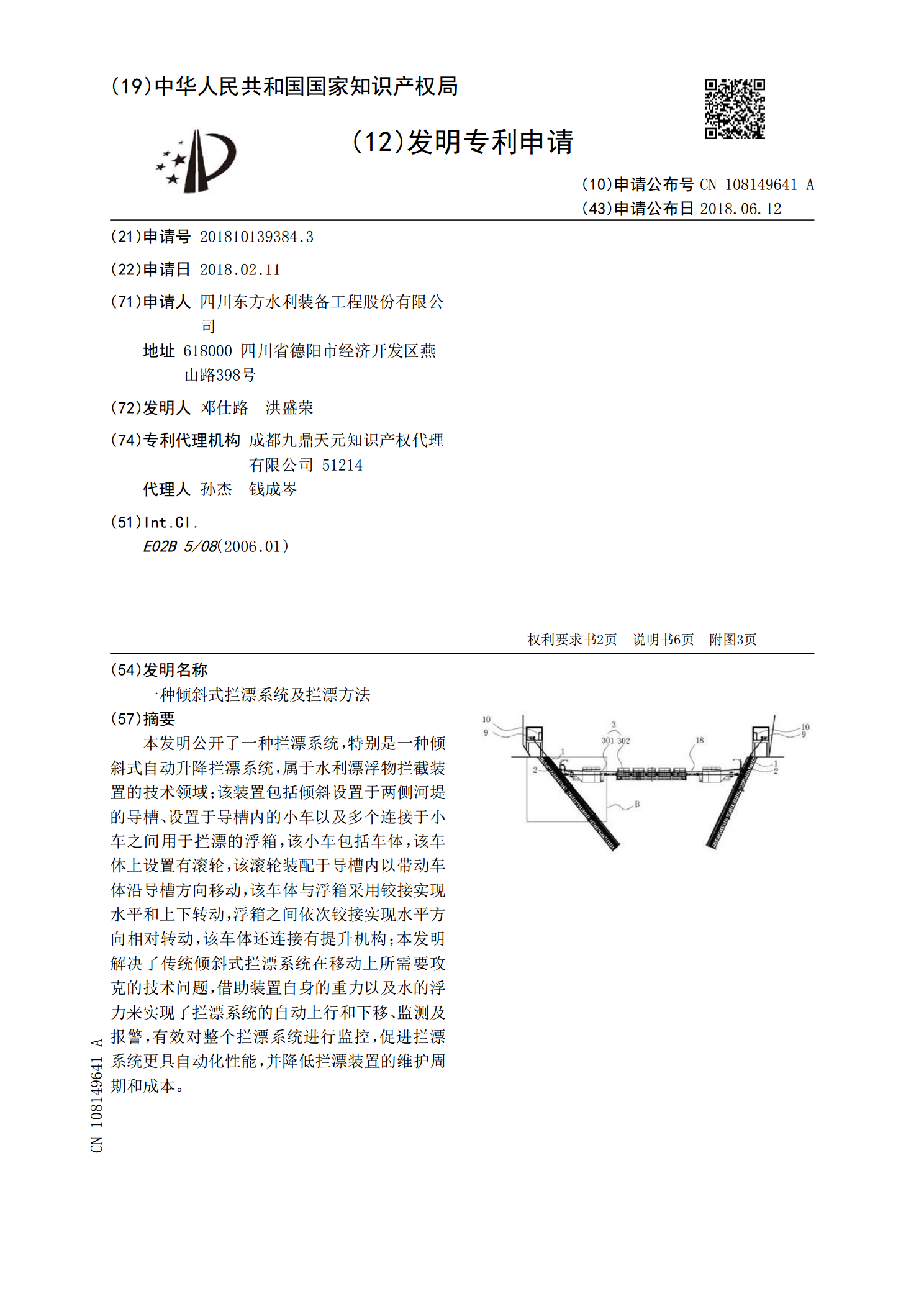
一种倾斜式拦漂系统及拦漂方法.pdf
本发明公开了一种拦漂系统,特别是一种倾斜式自动升降拦漂系统,属于水利漂浮物拦截装置的技术领域;该装置包括倾斜设置于两侧河堤的导槽、设置于导槽内的小车以及多个连接于小车之间用于拦漂的浮箱,该小车包括车体,该车体上设置有滚轮,该滚轮装配于导槽内以带动车体沿导槽方向移动,该车体与浮箱采用铰接实现水平和上下转动,浮箱之间依次铰接实现水平方向相对转动,该车体还连接有提升机构;本发明解决了传统倾斜式拦漂系统在移动上所需要攻克的技术问题,借助装置自身的重力以及水的浮力来实现了拦漂系统的自动上行和下移、监测及报警,有效对
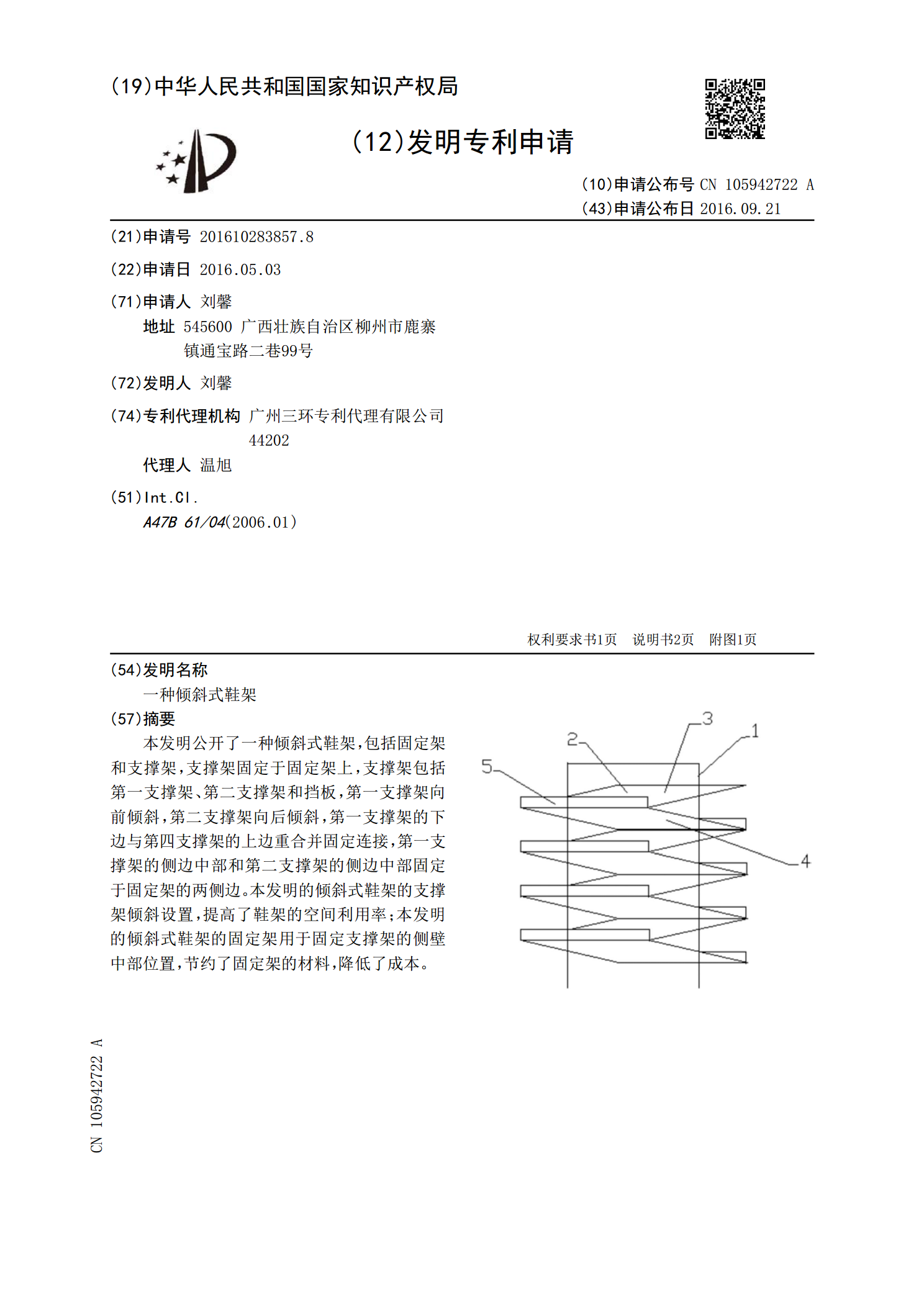
一种倾斜式鞋架.pdf
本发明公开了一种倾斜式鞋架,包括固定架和支撑架,支撑架固定于固定架上,支撑架包括第一支撑架、第二支撑架和挡板,第一支撑架向前倾斜,第二支撑架向后倾斜,第一支撑架的下边与第四支撑架的上边重合并固定连接,第一支撑架的侧边中部和第二支撑架的侧边中部固定于固定架的两侧边。本发明的倾斜式鞋架的支撑架倾斜设置,提高了鞋架的空间利用率;本发明的倾斜式鞋架的固定架用于固定支撑架的侧壁中部位置,节约了固定架的材料,降低了成本。