
基于轮系的绳驱动解耦机构及其解耦方法.pdf

小琛****82


1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于轮系的绳驱动解耦机构及其解耦方法.pdf
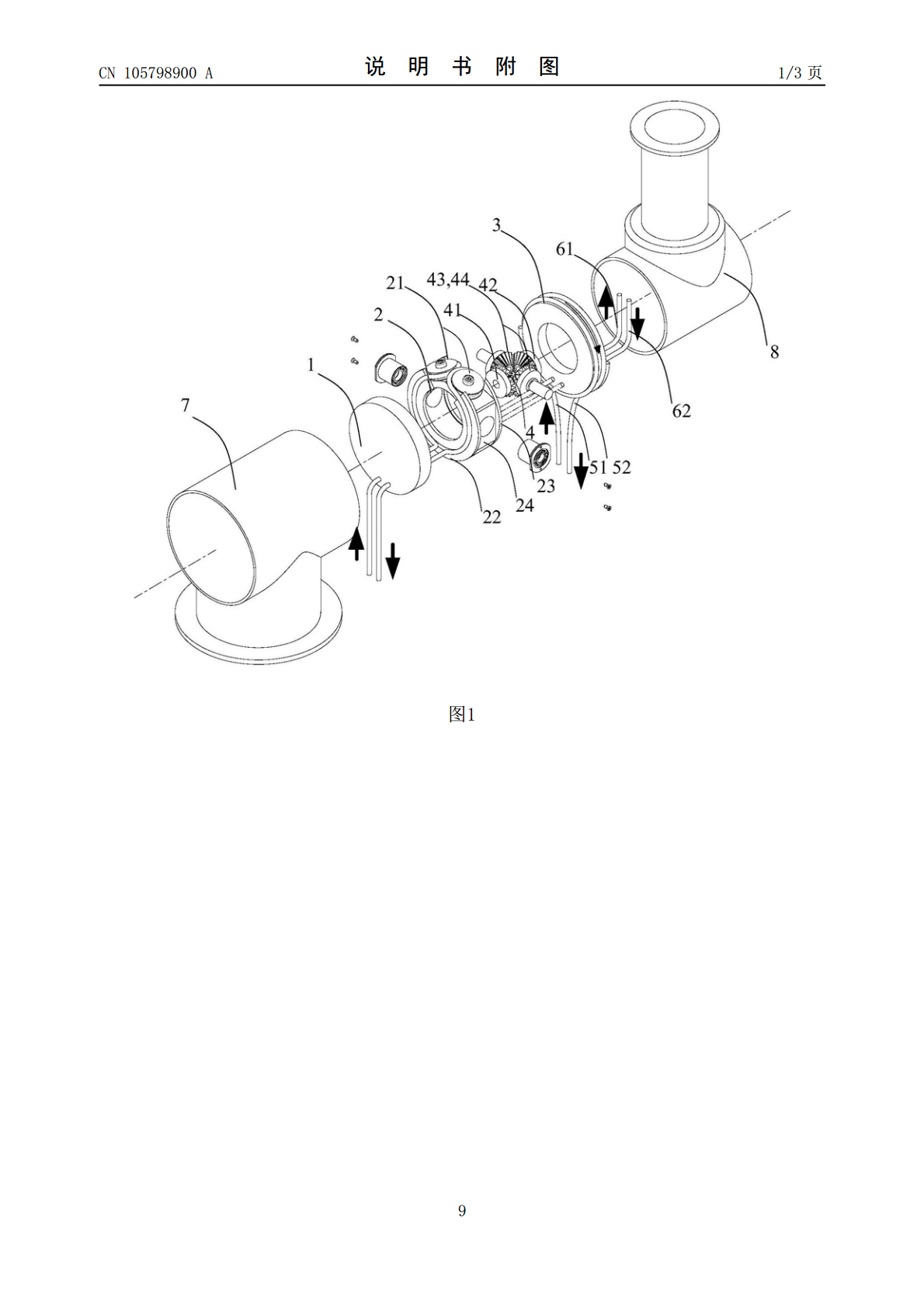
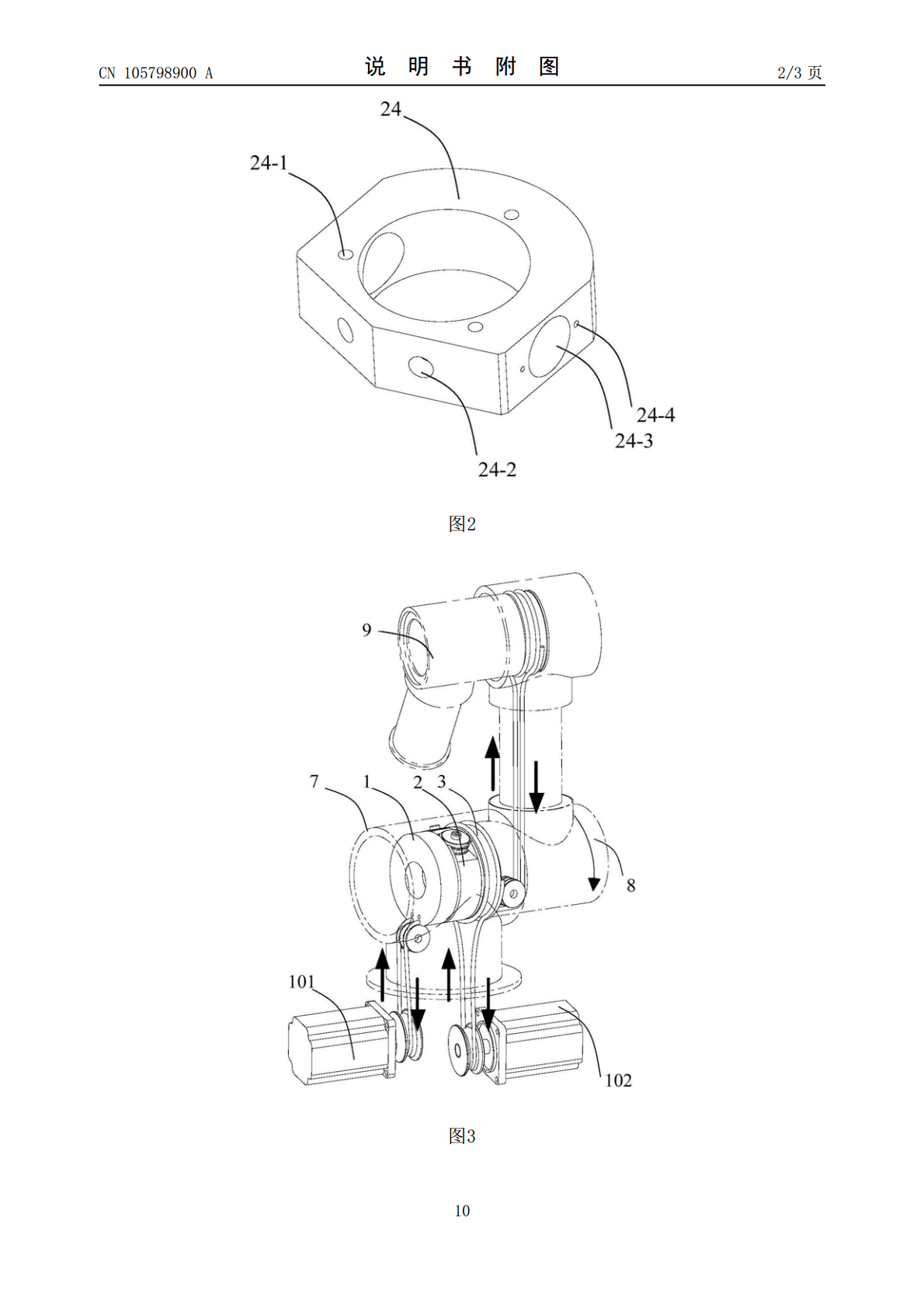
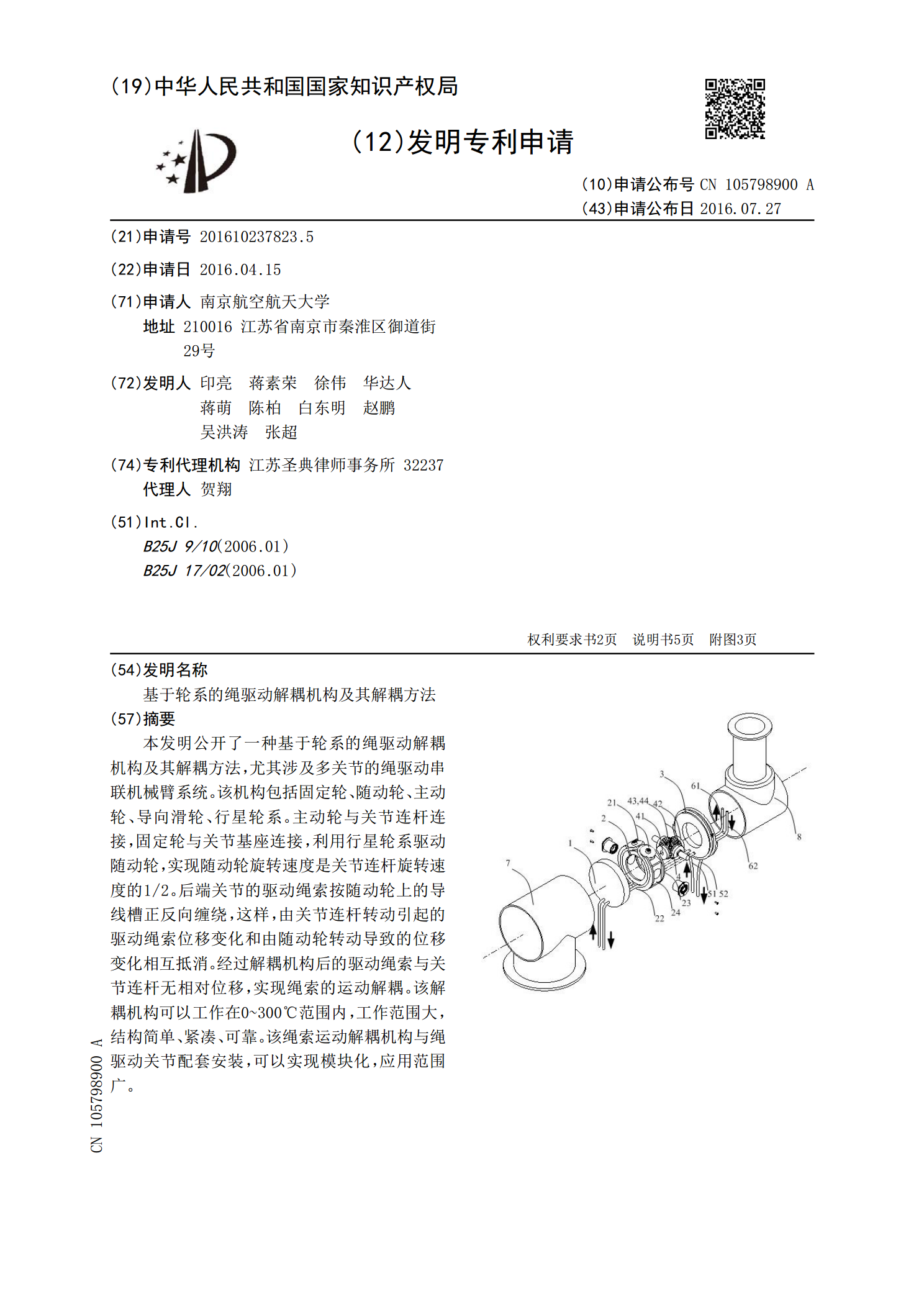
本发明公开了一种基于轮系的绳驱动解耦机构及其解耦方法,尤其涉及多关节的绳驱动串联机械臂系统。该机构包括固定轮、随动轮、主动轮、导向滑轮、行星轮系。主动轮与关节连杆连接,固定轮与关节基座连接,利用行星轮系驱动随动轮,实现随动轮旋转速度是关节连杆旋转速度的1/2。后端关节的驱动绳索按随动轮上的导线槽正反向缠绕,这样,由关节连杆转动引起的驱动绳索位移变化和由随动轮转动导致的位移变化相互抵消。经过解耦机构后的驱动绳索与关节连杆无相对位移,实现绳索的运动解耦。该解耦机构可以工作在0~300℃范围内,工作范围大,结构
无摩擦的绳驱动被动解耦机构及其解耦减摩方法.pdf
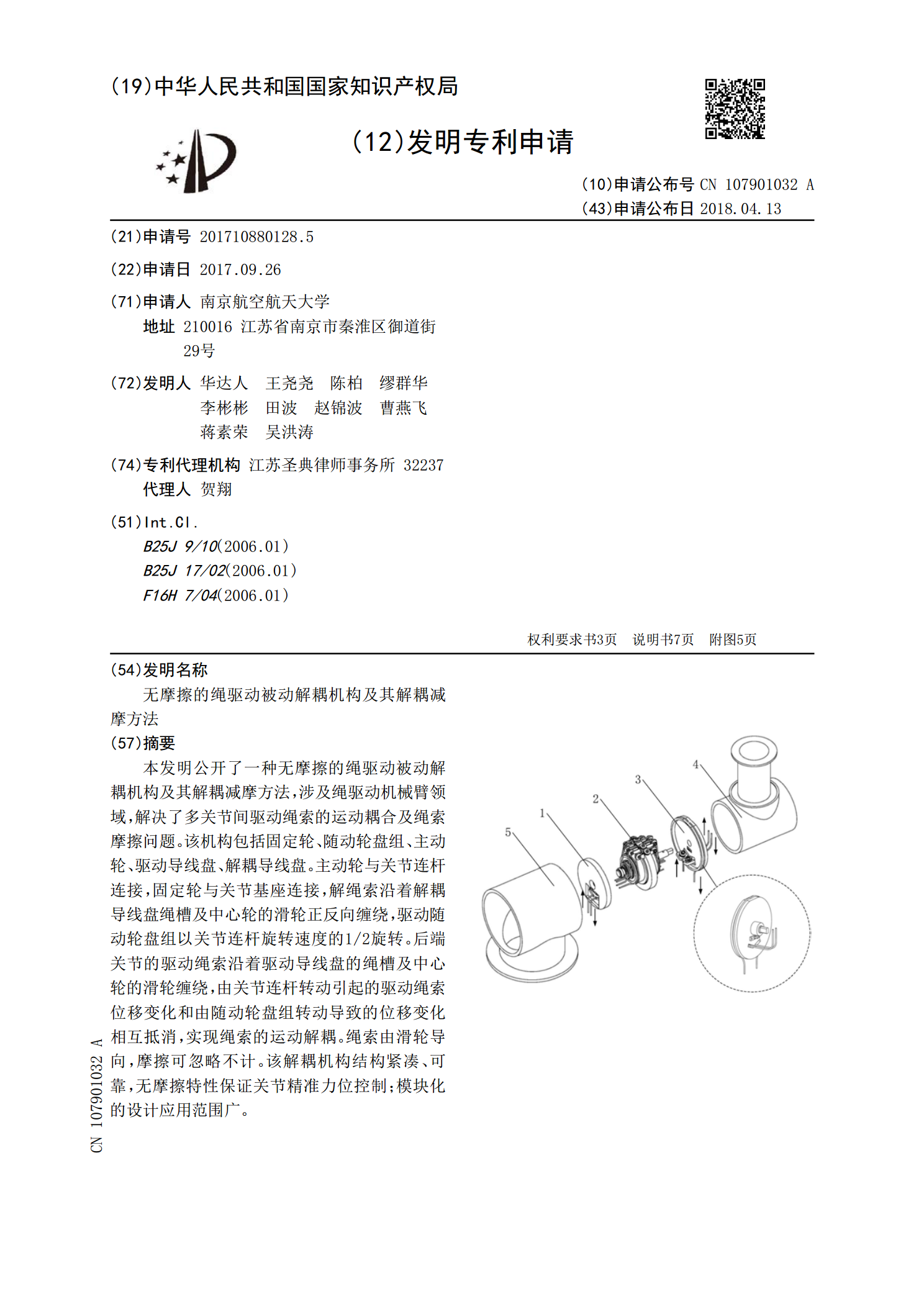
本发明公开了一种无摩擦的绳驱动被动解耦机构及其解耦减摩方法,涉及绳驱动机械臂领域,解决了多关节间驱动绳索的运动耦合及绳索摩擦问题。该机构包括固定轮、随动轮盘组、主动轮、驱动导线盘、解耦导线盘。主动轮与关节连杆连接,固定轮与关节基座连接,解绳索沿着解耦导线盘绳槽及中心轮的滑轮正反向缠绕,驱动随动轮盘组以关节连杆旋转速度的1/2旋转。后端关节的驱动绳索沿着驱动导线盘的绳槽及中心轮的滑轮缠绕,由关节连杆转动引起的驱动绳索位移变化和由随动轮盘组转动导致的位移变化相互抵消,实现绳索的运动解耦。绳索由滑轮导向,摩擦可
针对绳索运动耦合的被动解耦机构及其解耦方法.pdf
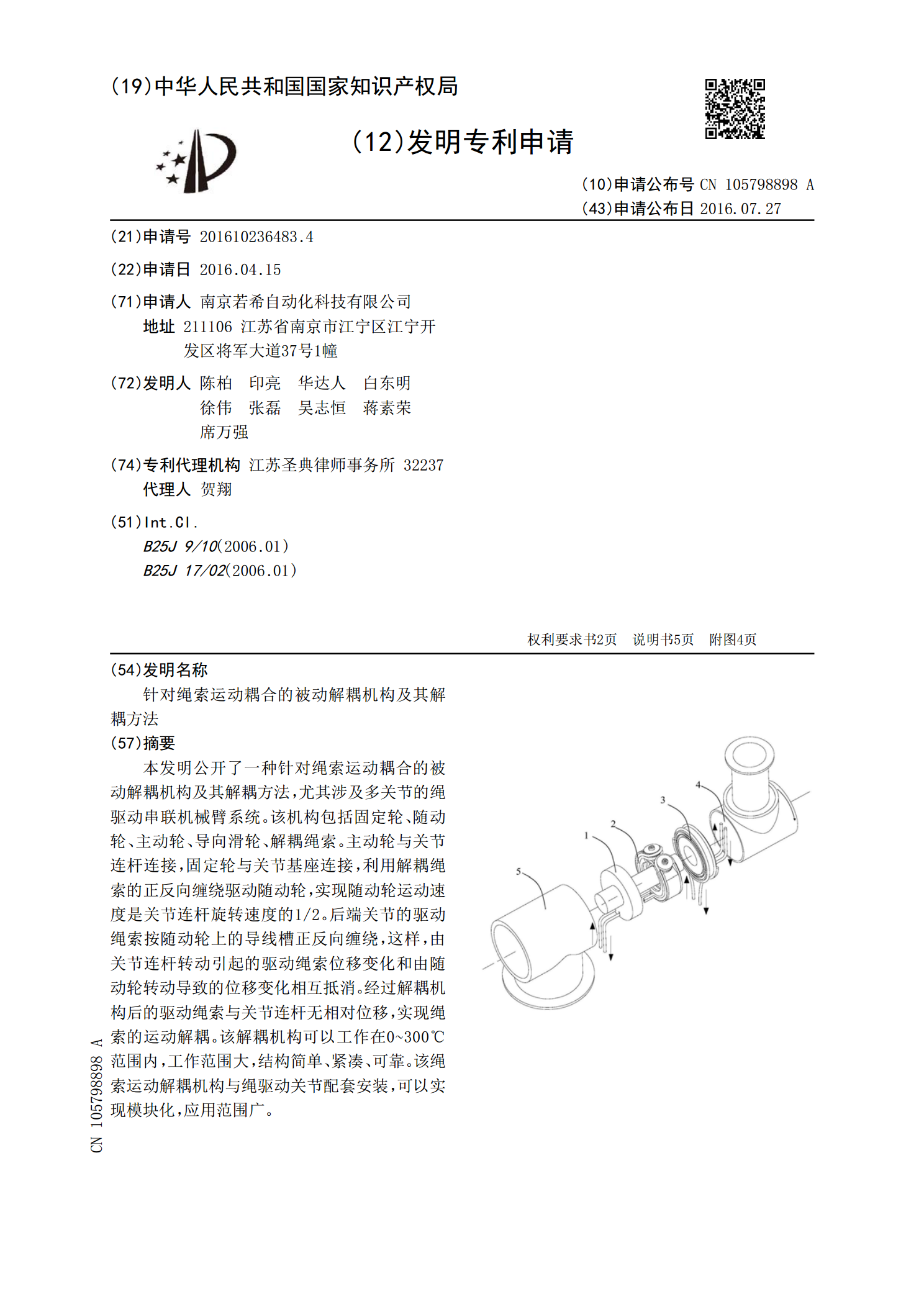
本发明公开了一种针对绳索运动耦合的被动解耦机构及其解耦方法,尤其涉及多关节的绳驱动串联机械臂系统。该机构包括固定轮、随动轮、主动轮、导向滑轮、解耦绳索。主动轮与关节连杆连接,固定轮与关节基座连接,利用解耦绳索的正反向缠绕驱动随动轮,实现随动轮运动速度是关节连杆旋转速度的1/2。后端关节的驱动绳索按随动轮上的导线槽正反向缠绕,这样,由关节连杆转动引起的驱动绳索位移变化和由随动轮转动导致的位移变化相互抵消。经过解耦机构后的驱动绳索与关节连杆无相对位移,实现绳索的运动解耦。该解耦机构可以工作在0~300℃范围内

解耦系统和用于解耦系统的方法.pdf
公开了一种解耦系统,其包括被配置为跨越低压室的低压孔口耦合的偏转板。所述偏转板包括延伸通过偏转板的一个或多个真空孔。剥落凸缘在柔顺关节处与偏转板的其余部分耦合。管芯轮廓开口围绕剥落凸缘从柔顺关节以管芯轮廓的形状延伸。所述管芯轮廓开口将剥落凸缘与偏转板的其余部分分开。剥落凸缘包括放松构造和剥落构造,所述放松构造和剥落构造被配置为将管芯从管芯介质解耦。在放松构造中,所述剥落凸缘与所述偏转板的其余部分重合。在剥落构造中,剥落凸缘被偏转,并且凸缘的至少一部分与偏转板的其余部分间隔开。

用于时计机构的解耦装置及包括该解耦装置的手表机芯.pdf
本发明涉及一种竖向类型的解耦装置,尤其用于自动手表上发条机构中的解耦装置,其包括振荡质块和将振荡质块连接到发条匣(9)的齿轮系,其中所述齿轮系包括换向装置(11、12)、减速齿轮(13、14、15、16)以及解耦装置(20)。解耦装置包括两个共轴轮(17、7),由于设置在所述两个共轴轮相对侧上的相应宝玑齿(21、22),所述两个共轴轮(17、7)能在沿一个方向旋转时耦接。沿轴向可动的共轴轮(17)固定到滑动轴(18),滑动轴安装成能在固定轴承(24、25)内旋转和滑动。复位弹簧(26)包括弹性板,其抵靠滑