
一种行星轮驱动的往复式定位移动装置.pdf

努力****妙风


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种行星轮驱动的往复式定位移动装置.pdf
一种行星轮驱动的往复式定位移动装置,第一铲斗和第二铲斗的根部安装在一起,大臂下端连接在底座上,第一伸缩杆一端连接在底座上,第一伸缩杆另一端与三角连接板的第一角连接,三角连接板的第二角连接在大臂上,三角连接板的第三角与第二伸缩杆一端连接,第二伸缩杆另一端连接的转轴上,第三伸缩杆下端连接在底座上,第三伸缩杆上端连接在第一滑套上,第一滑套套装在第二伸缩杆上。本装置具有结构紧凑、动作灵活、占地面积小、工作空间大等优点。
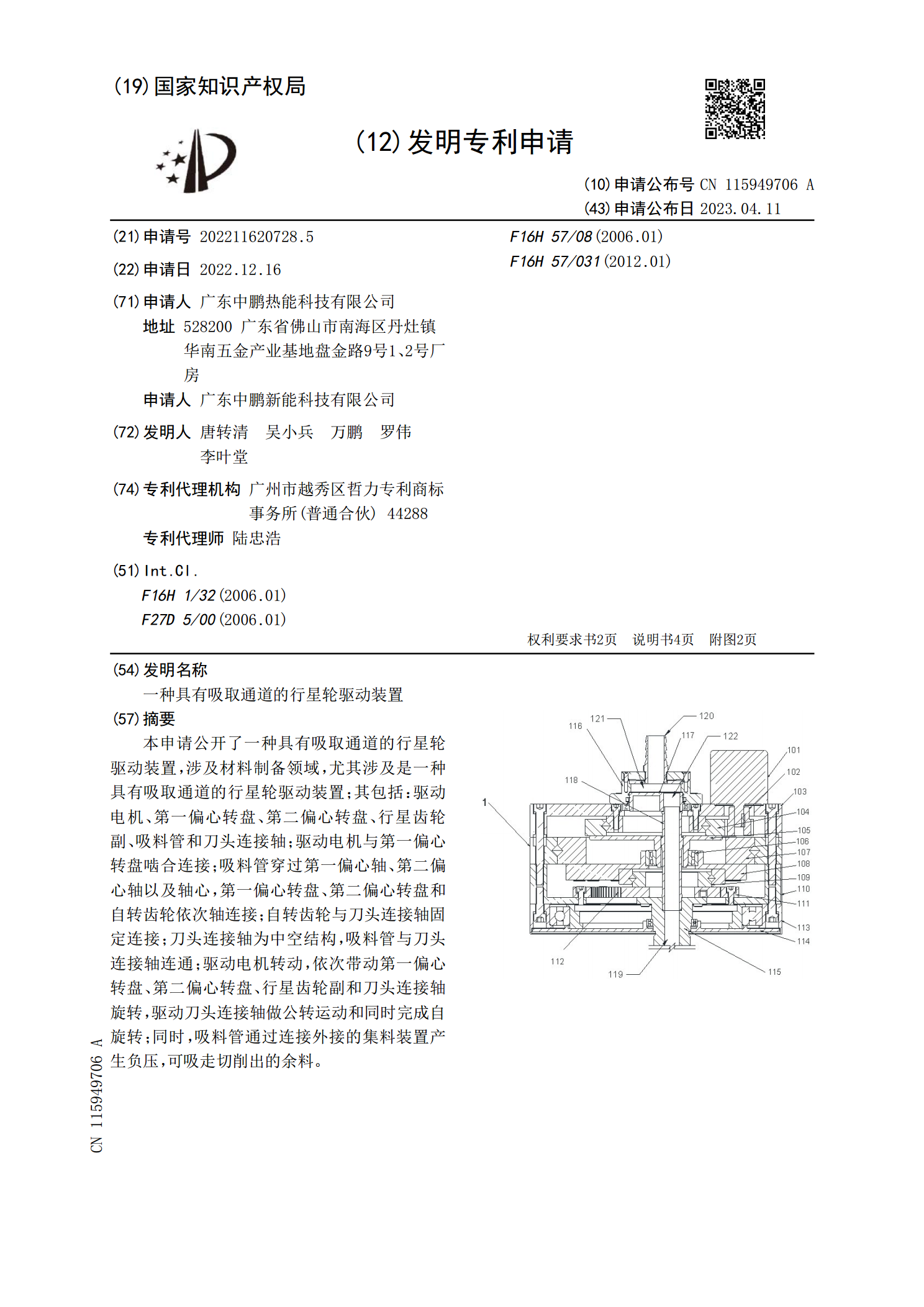
一种具有吸取通道的行星轮驱动装置.pdf
本申请公开了一种具有吸取通道的行星轮驱动装置,涉及材料制备领域,尤其涉及是一种具有吸取通道的行星轮驱动装置;其包括:驱动电机、第一偏心转盘、第二偏心转盘、行星齿轮副、吸料管和刀头连接轴;驱动电机与第一偏心转盘啮合连接;吸料管穿过第一偏心轴、第二偏心轴以及轴心,第一偏心转盘、第二偏心转盘和自转齿轮依次轴连接;自转齿轮与刀头连接轴固定连接;刀头连接轴为中空结构,吸料管与刀头连接轴连通;驱动电机转动,依次带动第一偏心转盘、第二偏心转盘、行星齿轮副和刀头连接轴旋转,驱动刀头连接轴做公转运动和同时完成自旋转;同时,

一种行星轮减速机构及驱动装置.pdf
本发明公开了一种行星轮减速机构及驱动装置,包括上端盖和下端盖,上端盖和下端盖之间固定设置有齿圈,齿圈的内部转动设置有由外界动力驱动的太阳轮,其中,齿圈的轴心线与太阳轮的轴心线重合。太阳轮与齿圈之间转动设置有固定架,固定架上固定设置有行星轮,其中,太阳轮和齿圈均与行星轮啮合。行星轮上固定设置有传动架,传动架与上端盖转动连接。该行星轮减速机构结构简单,体积小巧,减速效果优良。

一种行星轮驱动式筛分装置.pdf
本发明公开了一种行星轮驱动式筛分装置,其特征在于,包括:底座,用于将筛分装置固定于地面上;行星座,设于底座一端的两侧;筛板,设于筛分装置的上方,用于筛分物料;行星驱动机构,设于行星座的一侧,用于驱动筛板运动;滑槽,位于筛板的另一端,用于滑杆的指销在其中滑动;滑杆,通过一段的指销与滑槽相连接,可以通过指销在滑槽内滑动,滑杆的另一端设置有滑槽;以及驱动盘,驱动盘的圆心处与滑杆铰接,通过驱动盘上设置的指销在滑杆上的滑槽内滑动,从而驱动滑杆绕着驱动盘的圆心旋转。本发明的筛分装置结构简单、紧凑,操作空间大,筛板动作
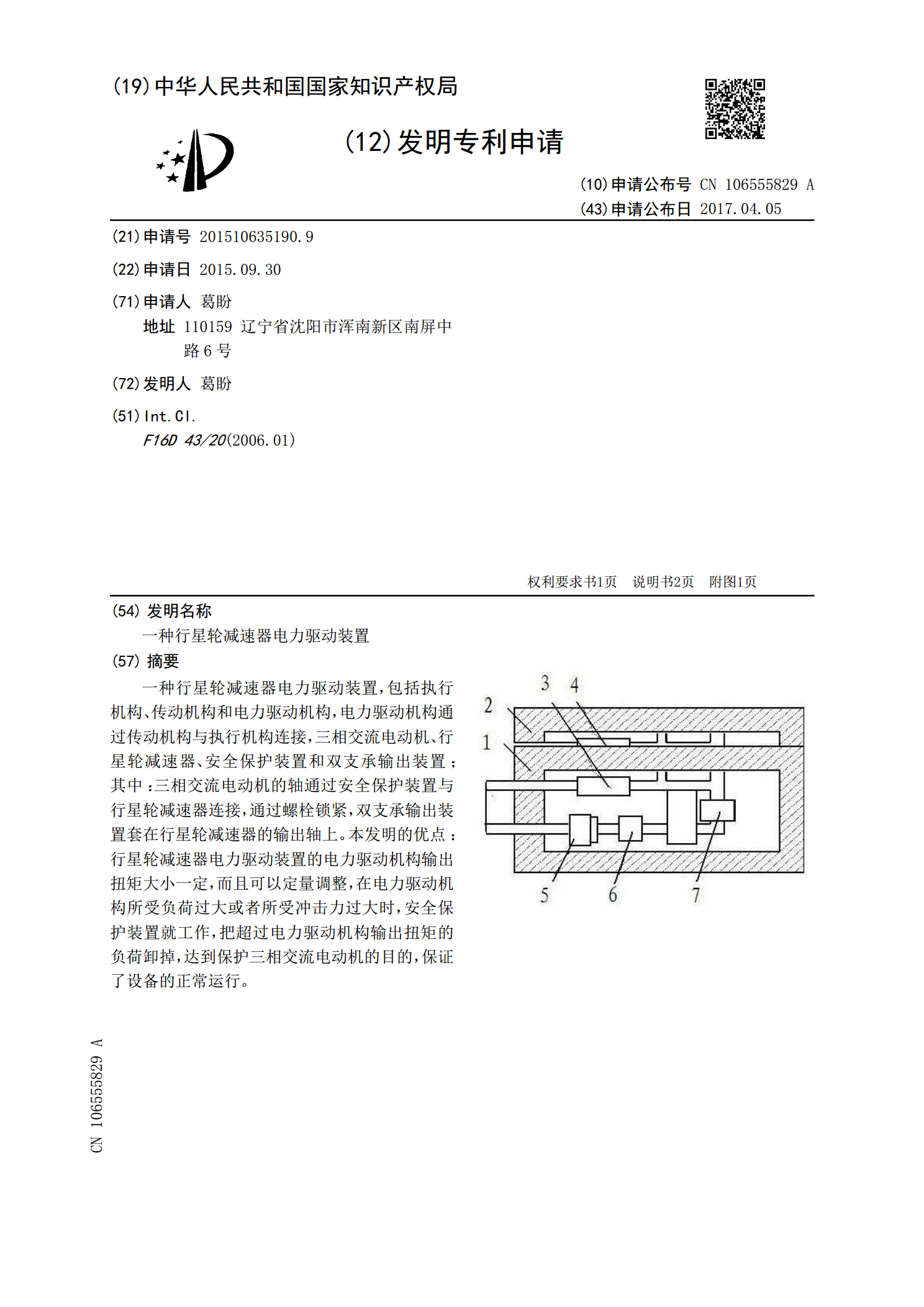
一种行星轮减速器电力驱动装置.pdf
一种行星轮减速器电力驱动装置,包括执行机构、传动机构和电力驱动机构,电力驱动机构通过传动机构与执行机构连接,三相交流电动机、行星轮减速器、安全保护装置和双支承输出装置;其中:三相交流电动机的轴通过安全保护装置与行星轮减速器连接,通过螺栓锁紧,双支承输出装置套在行星轮减速器的输出轴上。本发明的优点:行星轮减速器电力驱动装置的电力驱动机构输出扭矩大小一定,而且可以定量调整,在电力驱动机构所受负荷过大或者所受冲击力过大时,安全保护装置就工作,把超过电力驱动机构输出扭矩的负荷卸掉,达到保护三相交流电动机的目的,保