
自主移动机器人及其控制方法.pdf

猫巷****觅蓉

1/10

2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

自主移动机器人及其控制方法.pdf
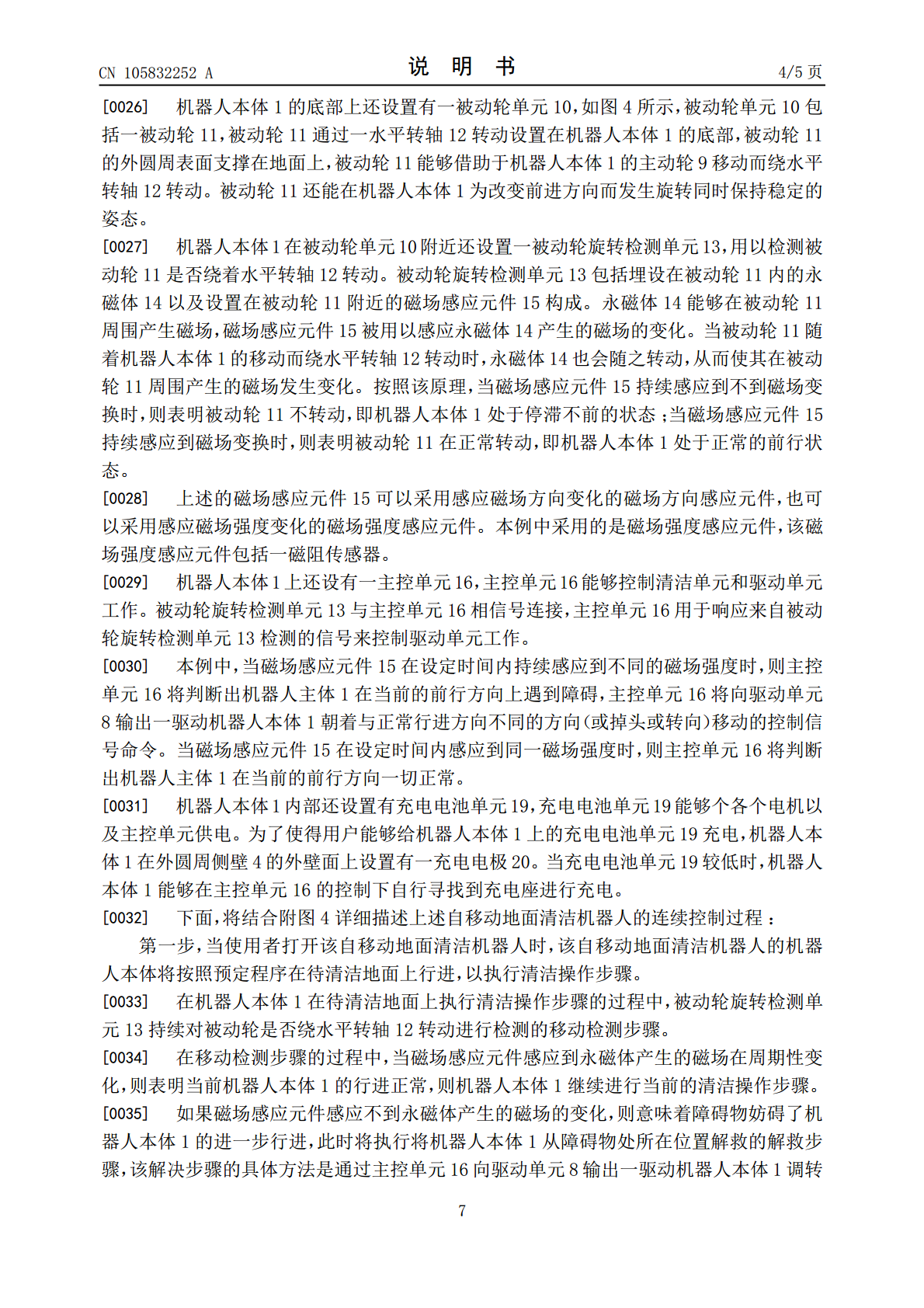
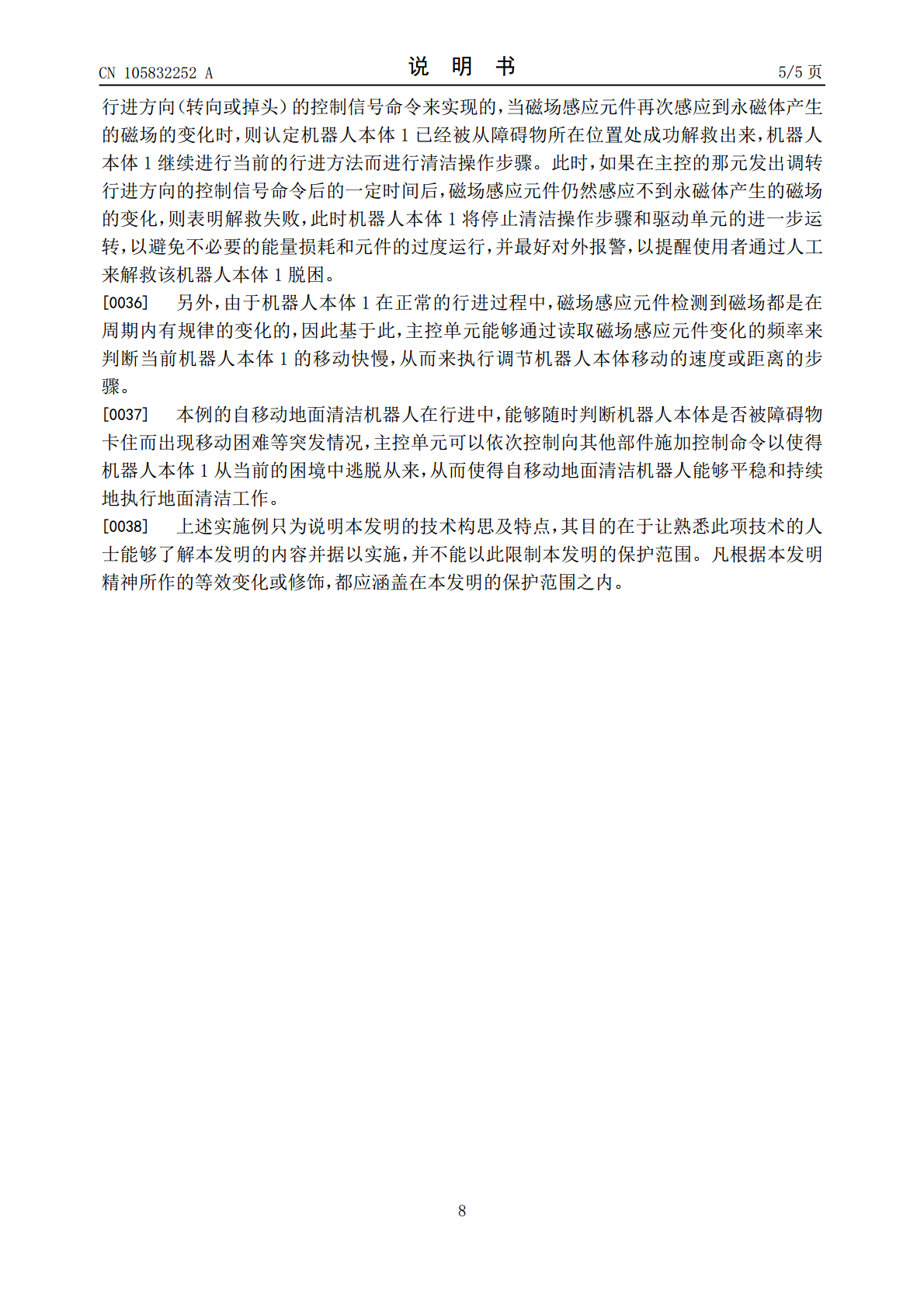
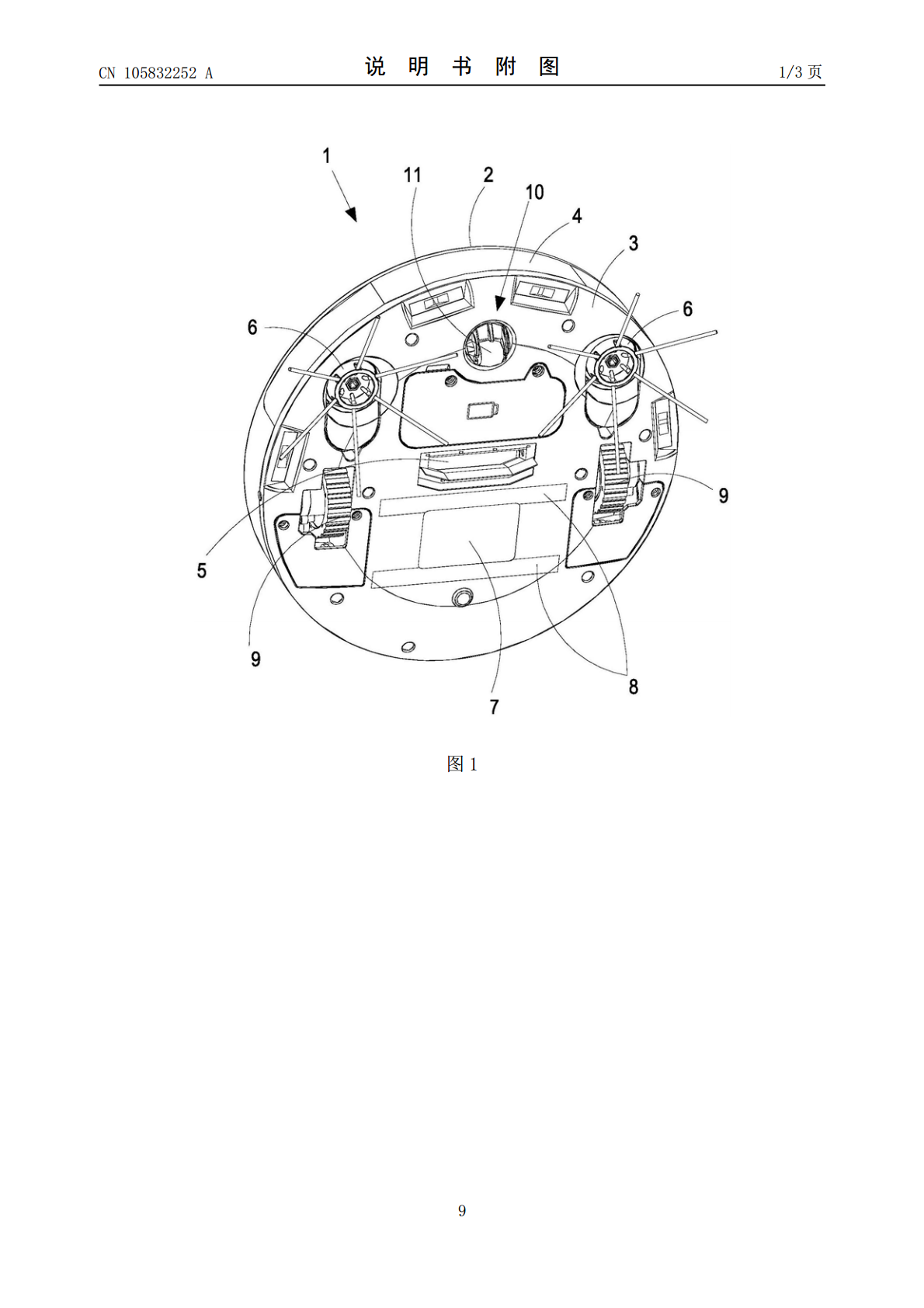
本发明涉及一种自主移动机器人及其控制方法,该机器人具有一能够在地面上移动的机器人本体,包括至少一个被动轮单元和一被动轮旋转检测单元,被动轮单元包括通过一转轴转动设置在机器人本体底部的被动轮,被动轮能够借助于机器人本体的移动而转动;被动轮旋转检测单元包括至少一个磁性元件和磁场感应元件,磁性元件设置在被动轮上并能够在被动轮周围产生磁场,磁场感应元件设置在被动轮附近并用以感应磁性元件产生的磁场变化。本发明的被动轮转动,磁性元件同被动轮一起转动,引起周边磁场有规律变化,磁场感应元件通过对磁场变换的检测来向主控单元
移动机器人及其控制方法.pdf
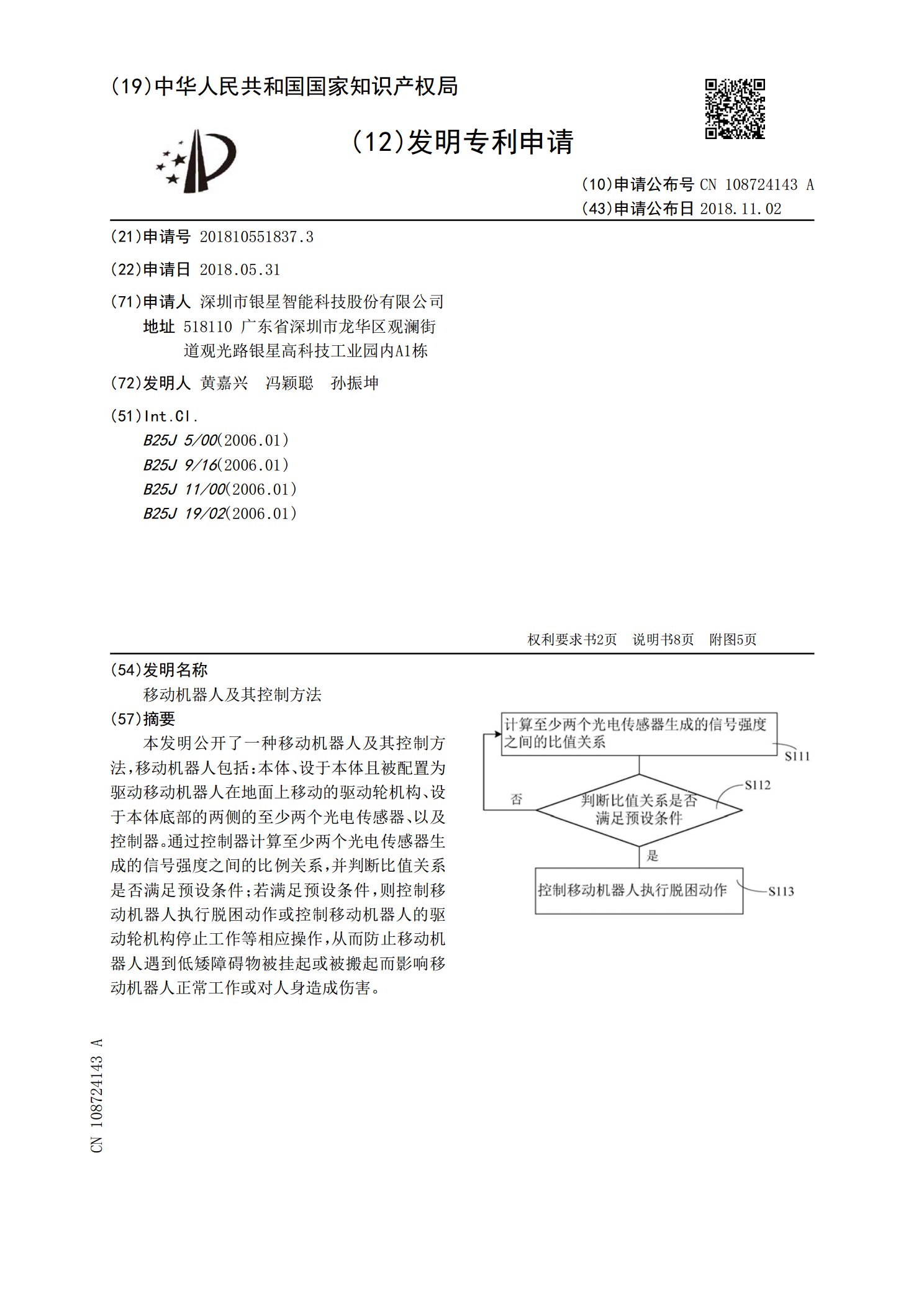
本发明公开了一种移动机器人及其控制方法,移动机器人包括:本体、设于本体且被配置为驱动移动机器人在地面上移动的驱动轮机构、设于本体底部的两侧的至少两个光电传感器、以及控制器。通过控制器计算至少两个光电传感器生成的信号强度之间的比例关系,并判断比值关系是否满足预设条件;若满足预设条件,则控制移动机器人执行脱困动作或控制移动机器人的驱动轮机构停止工作等相应操作,从而防止移动机器人遇到低矮障碍物被挂起或被搬起而影响移动机器人正常工作或对人身造成伤害。

移动机器人及其控制方法.pdf
本发明提出一种移动机器人及其控制系统,移动机器人包括可升降的激光雷达和双目摄像头,激光雷达在其有效检测范围内检测位于前行路线上的障碍物到移动机器人的距离并控制激光雷达下降至机器人本体中,双目摄像头在其到达有效检测范围后检测障碍物允许通行的最小高度并判断是否允许通过,激光雷达和双目摄像头的相互配合使移动机器人在不用减速或停止的情况下提前确定激光雷达的升降时机,高效通过有高度限制的障碍物。

控制自主移动机器人的系统和方法.pdf
一种用于控制在家庭内可机动操作的自主移动机器人的一个或多个操作的方法,所述方法包括:在自主移动机器人和远程计算系统之间建立无线通信,以及响应于从所述远程计算系统接收无线命令信号,启动所述自主移动机器人的一个或多个操作。所述自主移动机器人远离驻留在家庭内的音频媒体设备。所述音频媒体设备能够接收和发送音频。所述远程计算系统配置为将自主移动机器人的识别数据与音频媒体设备的识别数据相关联。所述无线命令信号对应于由所述音频媒体设备接收的可听用户命令。

自主移动机器人运动控制与协调方法研究.docx
自主移动机器人运动控制与协调方法研究一、概述随着科技的飞速发展,自主移动机器人在工业、农业、医疗、军事等诸多领域的应用越来越广泛。这些机器人能够自主感知环境、规划路径、执行任务,极大地提高了生产效率、降低了人力成本,并在某些特殊环境下保障了人员的安全。要实现机器人的自主移动,运动控制与协调方法的研究至关重要。自主移动机器人的运动控制涉及对机器人运动学、动力学特性的深入理解与建模,以及基于这些模型设计高效的控制算法。协调方法则需要考虑多个机器人之间的协同工作,以实现任务的优化分配和高效执行。本文旨在探讨自主