
自平衡车.pdf

论文****可爱


1/7

2/7
3/7
4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
自平衡车控制系统及自平衡车.pdf
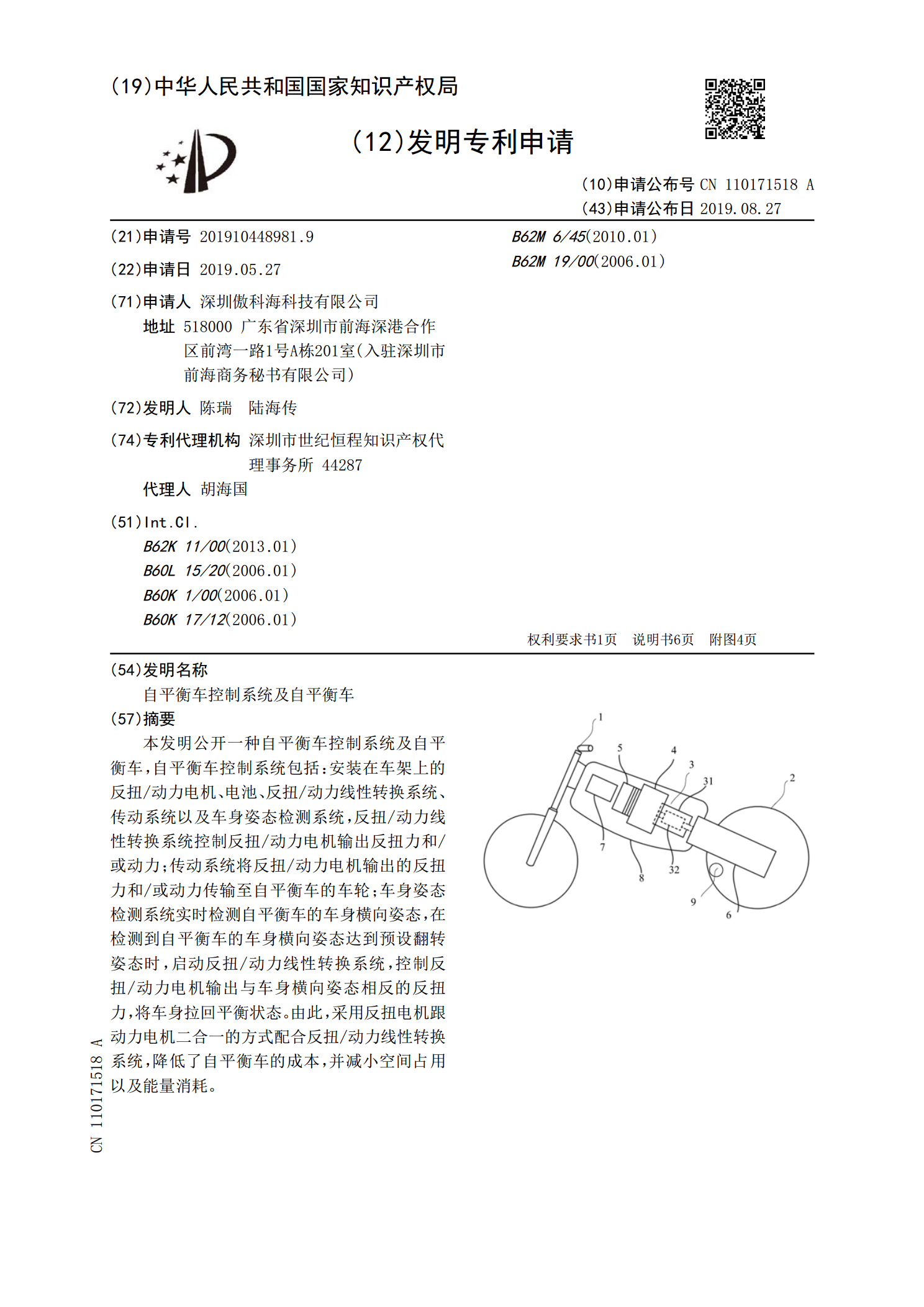
本发明公开一种自平衡车控制系统及自平衡车,自平衡车控制系统包括:安装在车架上的反扭/动力电机、电池、反扭/动力线性转换系统、传动系统以及车身姿态检测系统,反扭/动力线性转换系统控制反扭/动力电机输出反扭力和/或动力;传动系统将反扭/动力电机输出的反扭力和/或动力传输至自平衡车的车轮;车身姿态检测系统实时检测自平衡车的车身横向姿态,在检测到自平衡车的车身横向姿态达到预设翻转姿态时,启动反扭/动力线性转换系统,控制反扭/动力电机输出与车身横向姿态相反的反扭力,将车身拉回平衡状态。由此,采用反扭电机跟动力电机二
自平衡车.pdf
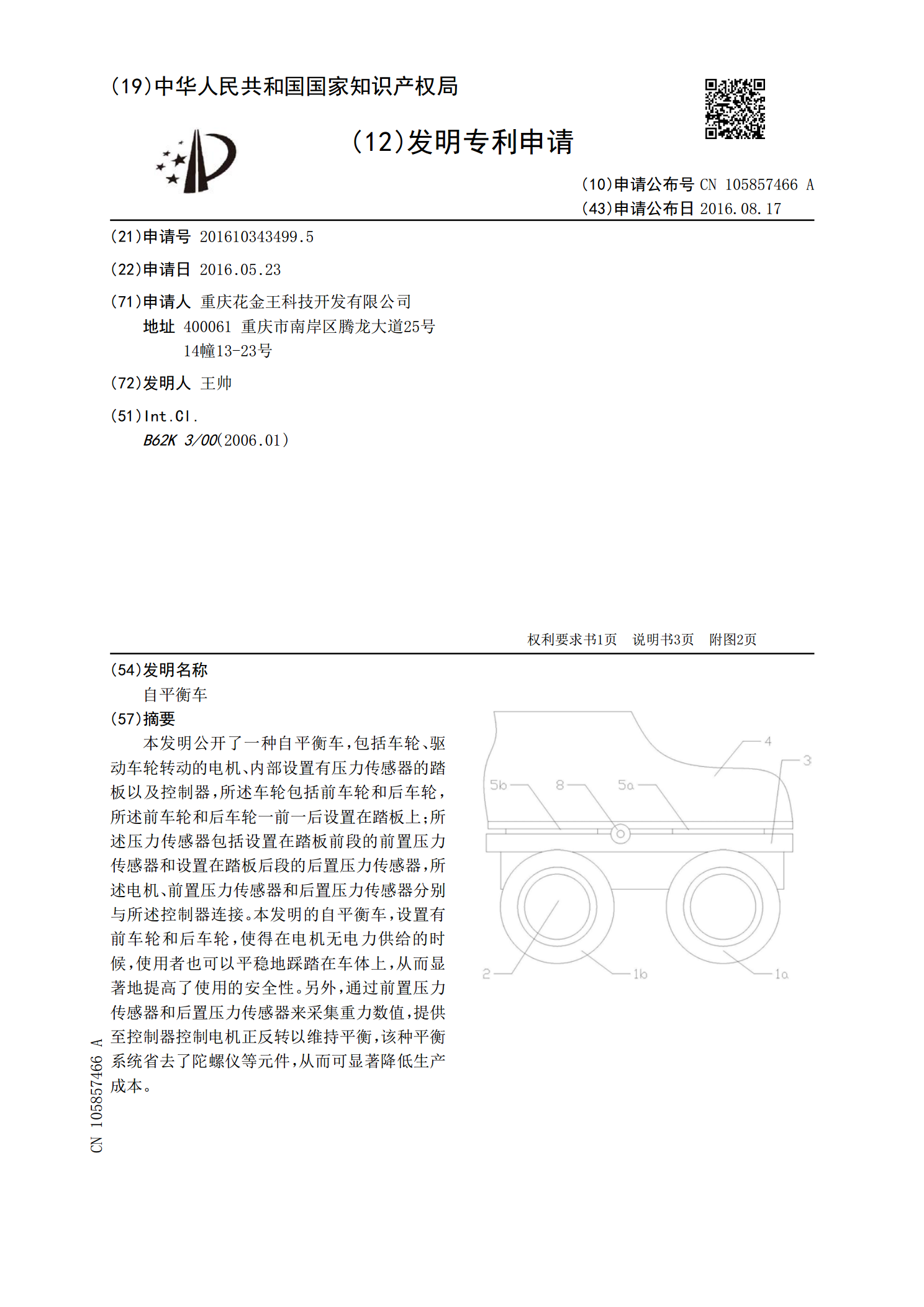
本发明公开了一种自平衡车,包括车轮、驱动车轮转动的电机、内部设置有压力传感器的踏板以及控制器,所述车轮包括前车轮和后车轮,所述前车轮和后车轮一前一后设置在踏板上;所述压力传感器包括设置在踏板前段的前置压力传感器和设置在踏板后段的后置压力传感器,所述电机、前置压力传感器和后置压力传感器分别与所述控制器连接。本发明的自平衡车,设置有前车轮和后车轮,使得在电机无电力供给的时候,使用者也可以平稳地踩踏在车体上,从而显著地提高了使用的安全性。另外,通过前置压力传感器和后置压力传感器来采集重力数值,提供至控制器控制电
自平衡代步车.pdf
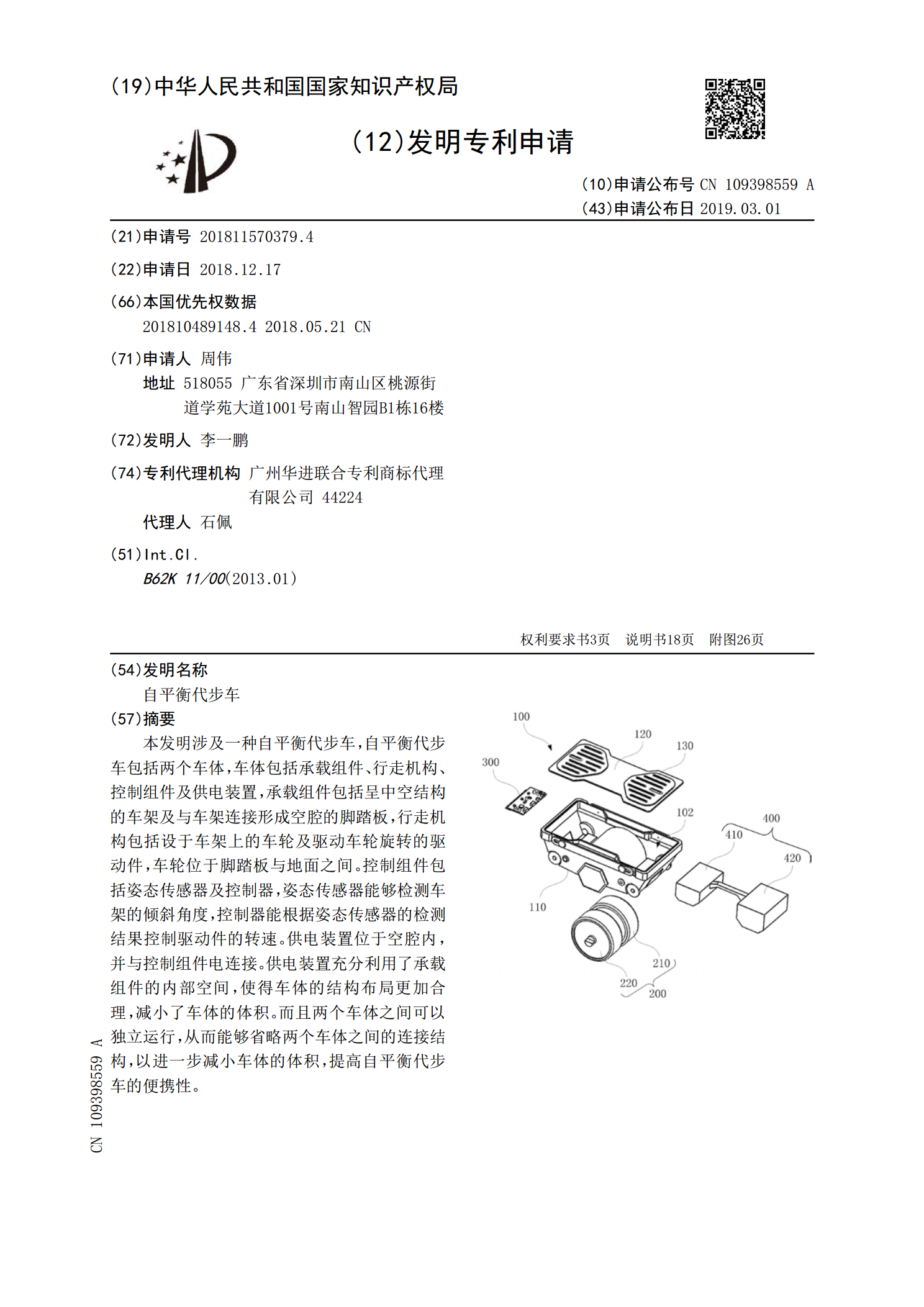
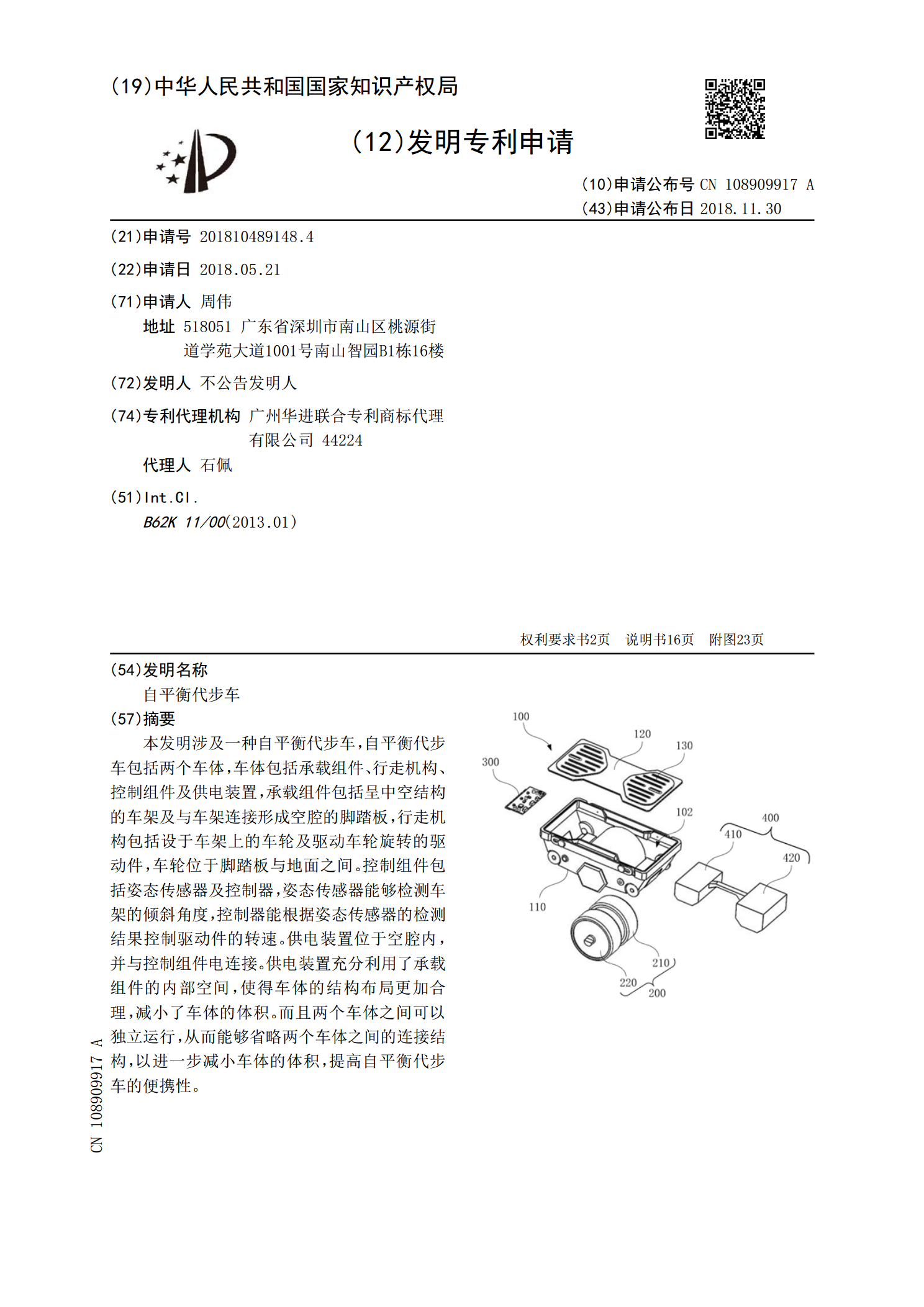
本发明涉及一种自平衡代步车,自平衡代步车包括两个车体,车体包括承载组件、行走机构、控制组件及供电装置,承载组件包括呈中空结构的车架及与车架连接形成空腔的脚踏板,行走机构包括设于车架上的车轮及驱动车轮旋转的驱动件,车轮位于脚踏板与地面之间。控制组件包括姿态传感器及控制器,姿态传感器能够检测车架的倾斜角度,控制器能根据姿态传感器的检测结果控制驱动件的转速。供电装置位于空腔内,并与控制组件电连接。供电装置充分利用了承载组件的内部空间,使得车体的结构布局更加合理,减小了车体的体积。而且两个车体之间可以独立运行,从
自平衡代步车.pdf
本发明涉及一种自平衡代步车,自平衡代步车包括两个车体,车体包括承载组件、行走机构、控制组件及供电装置,承载组件包括呈中空结构的车架及与车架连接形成空腔的脚踏板,行走机构包括设于车架上的车轮及驱动车轮旋转的驱动件,车轮位于脚踏板与地面之间。控制组件包括姿态传感器及控制器,姿态传感器能够检测车架的倾斜角度,控制器能根据姿态传感器的检测结果控制驱动件的转速。供电装置位于空腔内,并与控制组件电连接。供电装置充分利用了承载组件的内部空间,使得车体的结构布局更加合理,减小了车体的体积。而且两个车体之间可以独立运行,从

直立自平衡智能车.pdf
本发明公开了一种直立自平衡智能车,包括车体盘、主控板、LED显示板、倾角检测板、速度检测模块和驱动转向轮。主控板采用MC9S12XS128单片机,具有供电电压低,响应速度快,处理速度高,价格低廉等优点。可实现车模直立静止、直立前行、直立后退、直立前行左右转弯和直立后退左右转弯等功能。可用于本科、研究生的自动控制原理教学课程中;产品的性价比高,适合广大大学生;通过使用智能车主控板可熟悉MC9S12XS系列单片机的原理和编程技巧,掌握数字加速度计和陀螺仪的使用方法和控制原理,易制作易学习,提高学生的动手能力和