
挠性陀螺测斜仪寻北全温标定补偿方法.pdf

纪阳****公主

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
挠性陀螺测斜仪寻北全温标定补偿方法.pdf
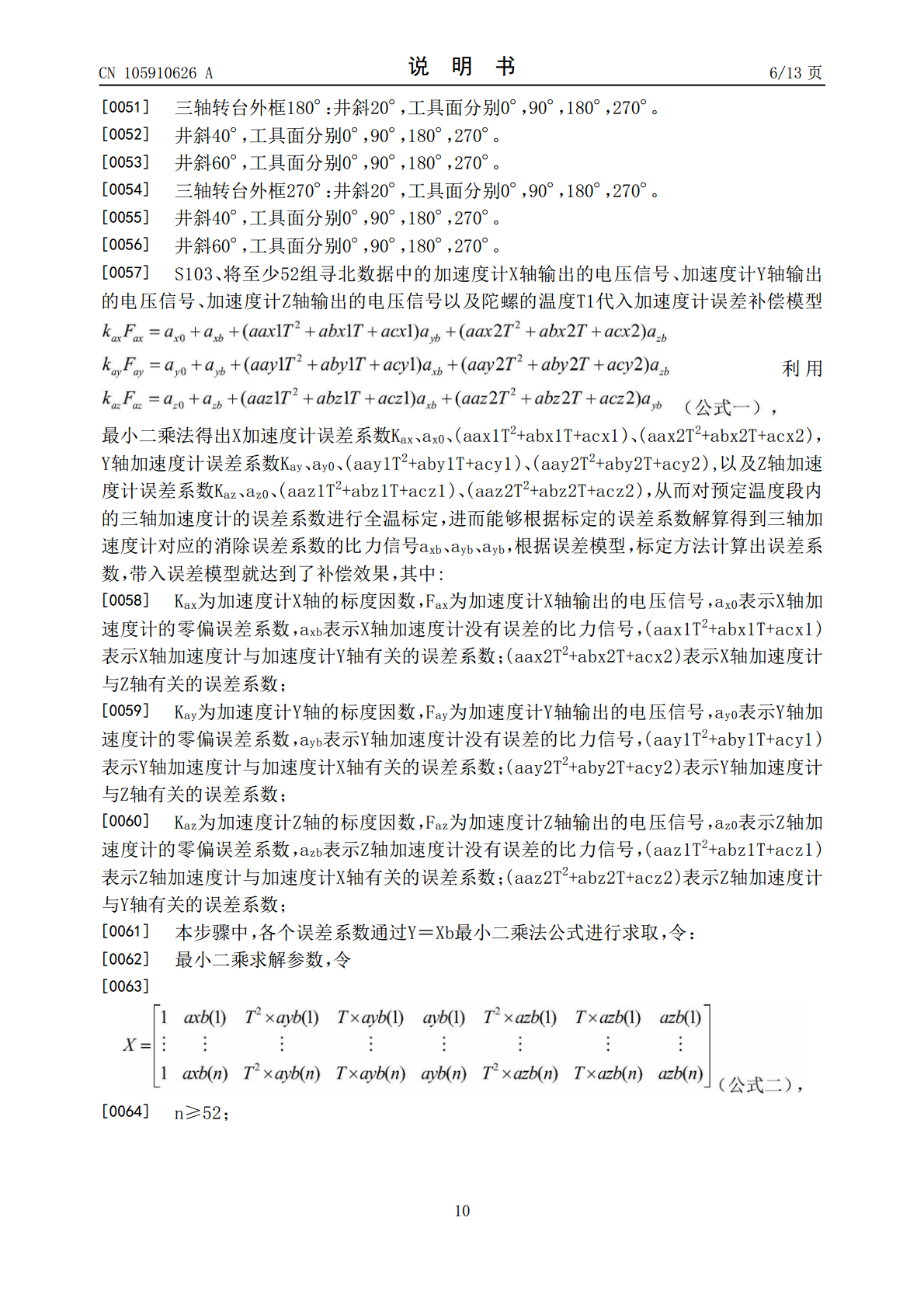
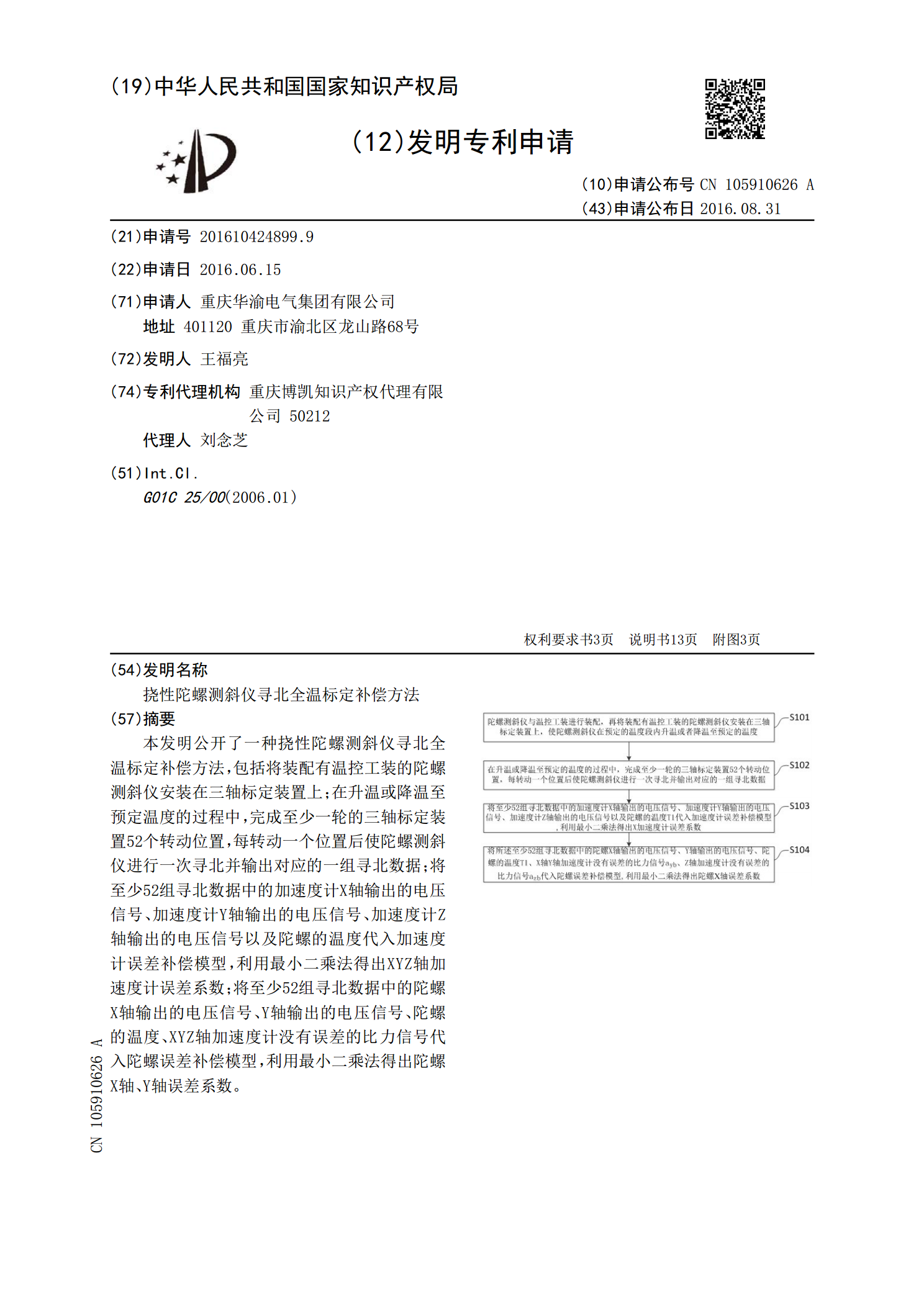
本发明公开了一种挠性陀螺测斜仪寻北全温标定补偿方法,包括将装配有温控工装的陀螺测斜仪安装在三轴标定装置上;在升温或降温至预定温度的过程中,完成至少一轮的三轴标定装置52个转动位置,每转动一个位置后使陀螺测斜仪进行一次寻北并输出对应的一组寻北数据;将至少52组寻北数据中的加速度计X轴输出的电压信号、加速度计Y轴输出的电压信号、加速度计Z轴输出的电压信号以及陀螺的温度代入加速度计误差补偿模型,利用最小二乘法得出XYZ轴加速度计误差系数;将至少52组寻北数据中的陀螺X轴输出的电压信号、Y轴输出的电压信号、陀螺的

挠性陀螺寻北仪解算方法研究.docx
挠性陀螺寻北仪解算方法研究摘要:挠性陀螺寻北仪是一种新型的寻北仪器,它具有高精度、快速响应的特点,在航天、航海等领域具有广泛的应用前景。本文针对挠性陀螺寻北仪的解算方法进行研究,包括传统的解算方法和基于数学模型的解算方法。通过实验和模拟的方法比较了不同解算方法的优缺点,对挠性陀螺寻北仪的解算方法进行了优化和改进。关键词:挠性陀螺寻北仪、解算方法、数学模型、优化一、引言挠性陀螺寻北仪是一种基于惯性导航原理的寻北仪器,它利用陀螺的旋转惯性来找到地球的北极方向。与传统的磁力寻北仪相比,挠性陀螺寻北仪具有更高的精

测斜仪中陀螺的标定方法研究.docx
测斜仪中陀螺的标定方法研究一、引言测斜仪是测量物体相对于水平面的倾斜角度的一种仪器。而测斜仪中陀螺的标定方法则是在使用该仪器时非常重要的一个步骤。本文将探讨测斜仪中陀螺的标定方法及其重要性,同时介绍几种常用的标定方法。二、测斜仪中陀螺的标定方法在测斜仪中,陀螺作用于测斜仪中,通过陀螺的稳定作用可以保证测量的精度和稳定性。而在使用测斜仪时,陀螺需要进行标定,以保证它能够准确地显示物体倾斜的角度。下面我们将介绍一些常用的标定方法:1.直接标定法这种方法是现场标定法,通过把测斜仪放置在一定的垂直条件下进行标定。
寻北仪系统的挠性陀螺伺服电路设计.pdf
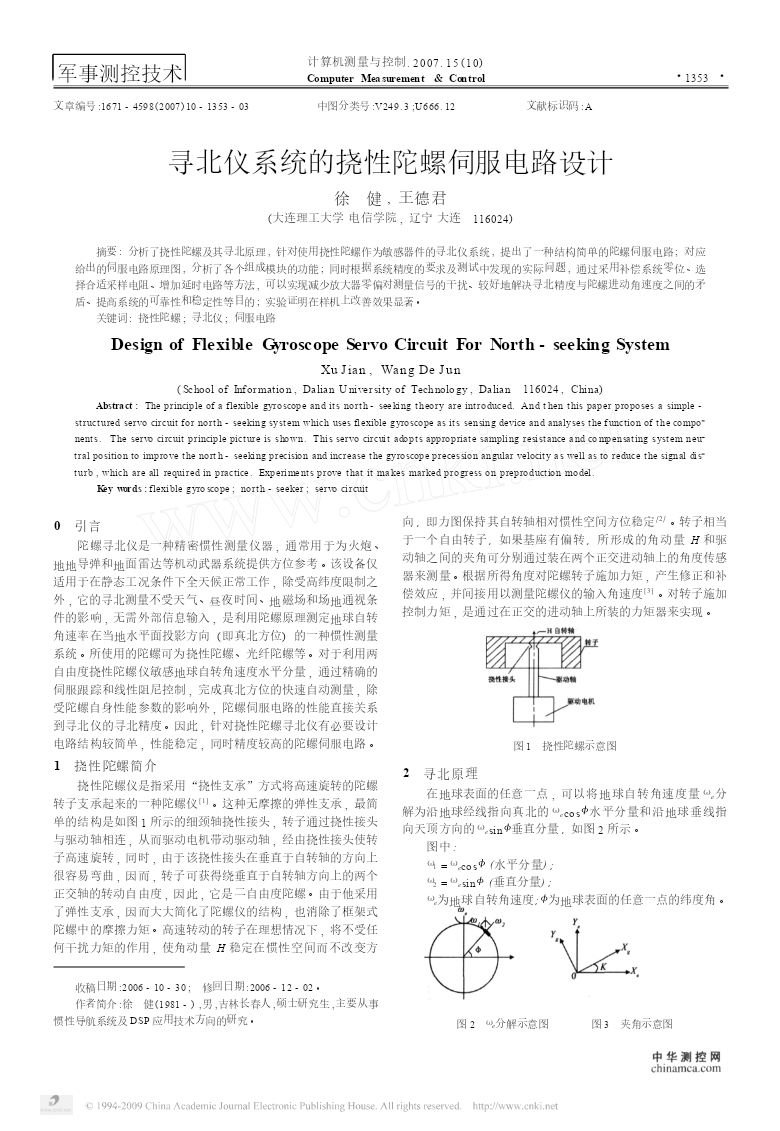
计算机测量与控制.2007.15(10)军事测控技术ComputerMeasurement&Control·1353·文章编号:1671-4598(2007)10-1353-03中图分类号:V249.3;U666.12文献标识码:A寻北仪系统的挠性陀螺伺服电路设计徐健,王德君(大连理工大学电信学院,辽宁大连116024)摘要:分析了挠性陀螺及其寻北原理,针对使用挠性陀螺作为敏感器件的寻北仪系统,提出了一种结构简单的陀螺伺服电路;对应给出的伺服电路原理图,分析了各个组成模块的功能;同时根据系统精度的要求及测

全姿态挠性陀螺寻北仪的研制及其数据处理技术的综述报告.docx
全姿态挠性陀螺寻北仪的研制及其数据处理技术的综述报告一、引言随着现代技术的发展,磁力计寻北仪已逐渐被广泛使用,但是由于地球磁场不稳定和地下矿物对磁场的干扰,磁力计寻北仪的精度和可靠性难以保证。而全姿态挠性陀螺寻北仪则可以实现高精度和高稳定性的寻北,因此在航空、航天、海洋等领域得到越来越广泛的应用。本文将介绍全姿态挠性陀螺寻北仪的研制以及其数据处理技术的发展。二、全姿态挠性陀螺寻北仪研制1.陀螺仪全姿态挠性陀螺寻北仪的核心是陀螺仪,陀螺仪利用陀螺运动的角动量来检测和测量姿态的变化。全姿态挠性陀螺寻北仪采用光