
横机中的中山传动机构.pdf

玉怡****文档


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

横机中的中山传动机构.pdf
本发明公开了一种横机中的中山传动机构,电机安装在连杆座上,电机轴上安装一凸轮;中山连杆中间安装在第一转动轴上,第一转动轴固定安装在连杆座上;中山连杆一端抵在凸轮上,另一端抵在中山导块的末梢处;中山导块和翻针导块均安装在导块安装架上,翻针导块的末梢处设有弹簧;中山导块和翻针导块之间具有一杠杆,中山导块和翻针导块朝向杠杆的一侧均设有凹槽,杠杆两端分别置于中山导块和翻针导块的凹槽内。本发明利用凸轮再结合杠杆原理控制来控制中山导块的升降运动,实现中山导块与翻针导块的工作切换,保证同一时间只有需要的那一种导块处于工
横机的翻针传动机构.pdf
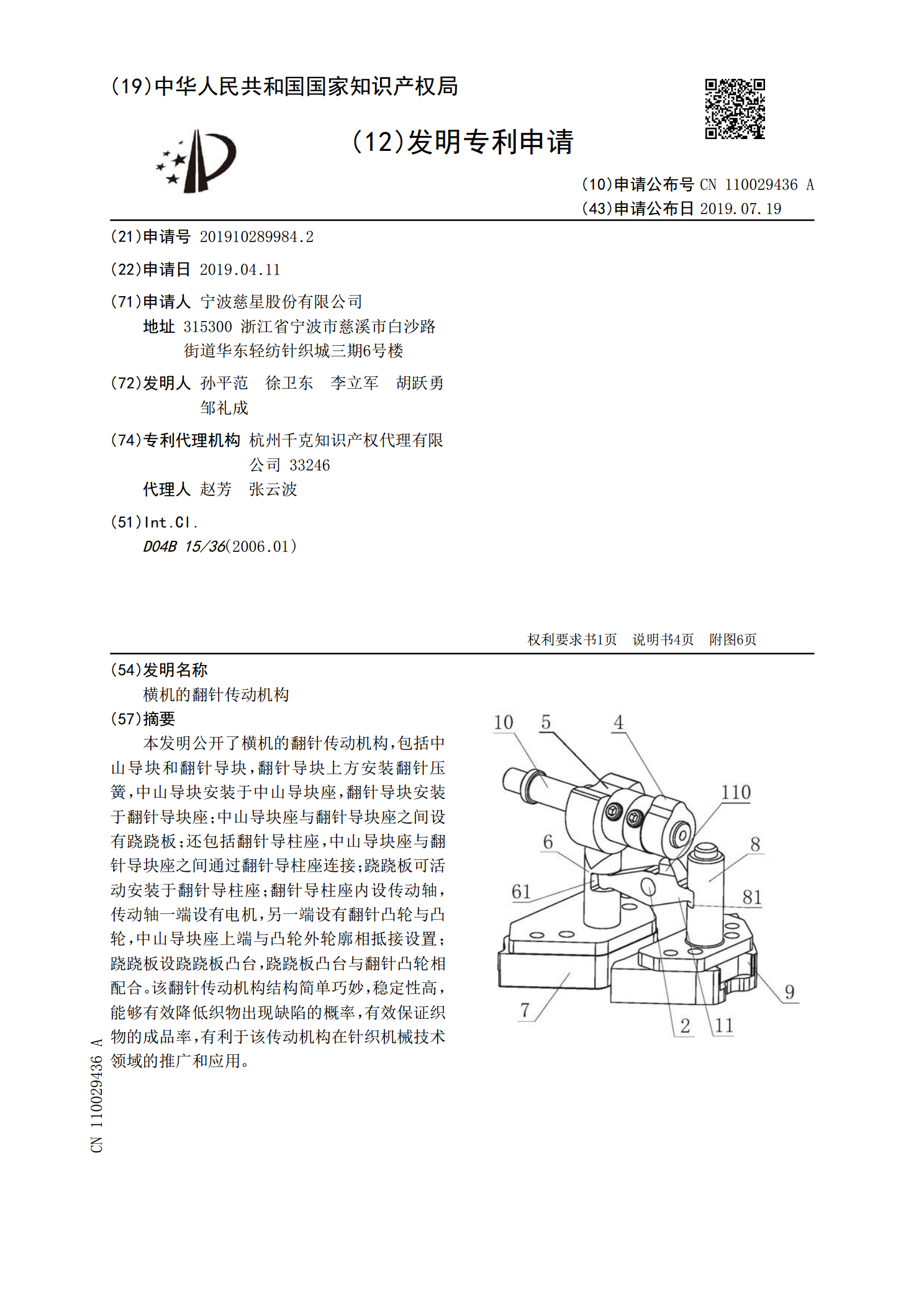
本发明公开了横机的翻针传动机构,包括中山导块和翻针导块,翻针导块上方安装翻针压簧,中山导块安装于中山导块座,翻针导块安装于翻针导块座;中山导块座与翻针导块座之间设有跷跷板;还包括翻针导柱座,中山导块座与翻针导块座之间通过翻针导柱座连接;跷跷板可活动安装于翻针导柱座;翻针导柱座内设传动轴,传动轴一端设有电机,另一端设有翻针凸轮与凸轮,中山导块座上端与凸轮外轮廓相抵接设置;跷跷板设跷跷板凸台,跷跷板凸台与翻针凸轮相配合。该翻针传动机构结构简单巧妙,稳定性高,能够有效降低织物出现缺陷的概率,有效保证织物的成品率

一种纺织用横机传动机构.pdf
本发明涉及的是纺织机械的技术领域,尤其是一种纺织用横机传动机构。其包括第一组同步轮、第二组同步轮、传动轴、主动链轮、传动链轮、驱动块和同步带;所述主动链轮连接传动链轮,所述传动链轮固定设置在传动轴上,所述传动轴上设置有第一组同步轮,所述第一组同步轮通过同步带连接第二组同步轮,所述驱动块设置在同步带上。该纺织用横机传动机构,结构简单,传动平稳,减少了挡车工的劳动强度,提高起头速度,提高了整体毛纺的生产效率,增加了经济效益。
针织横机的中山导块翻针导块控制机构.pdf
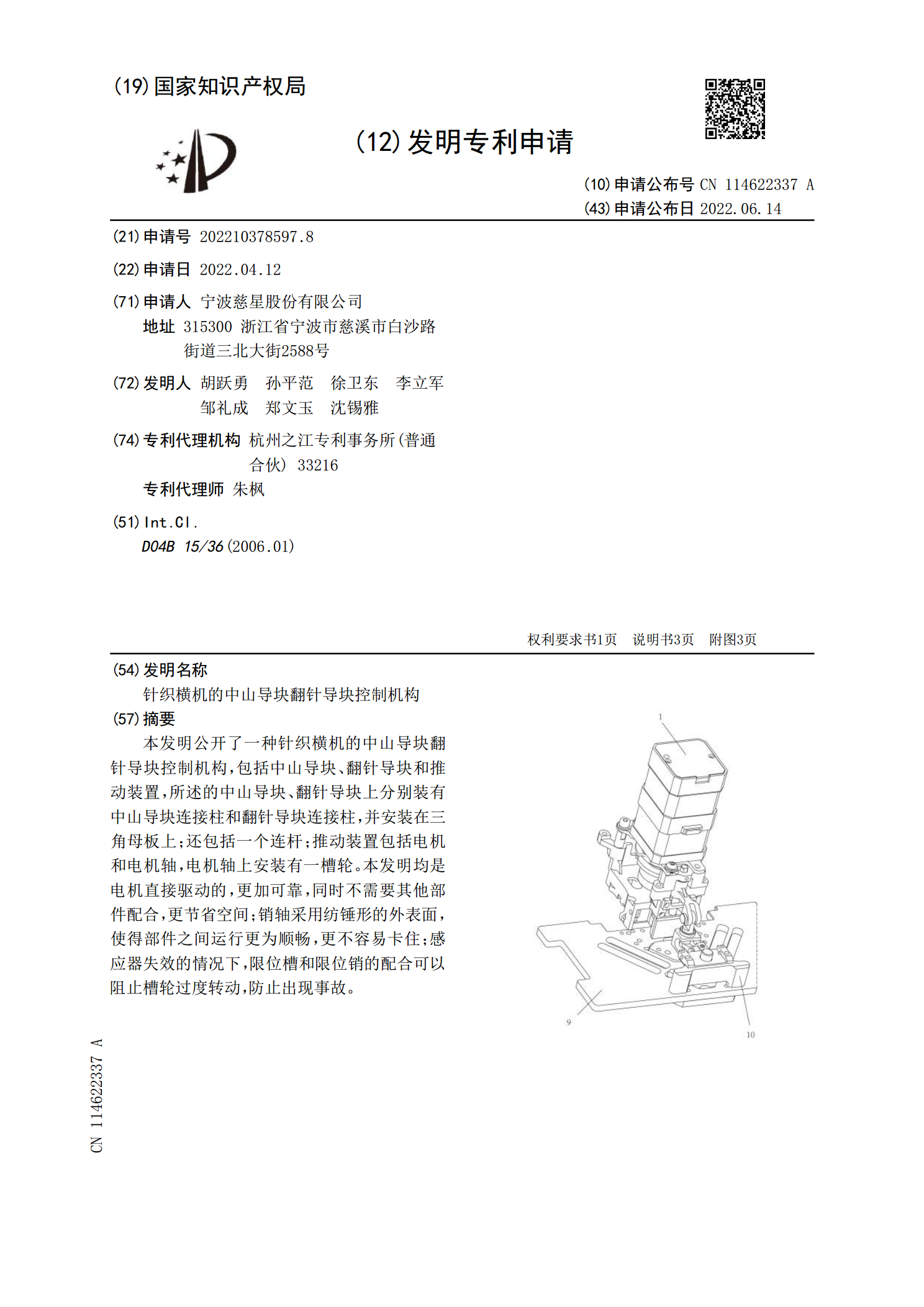
本发明公开了一种针织横机的中山导块翻针导块控制机构,包括中山导块、翻针导块和推动装置,所述的中山导块、翻针导块上分别装有中山导块连接柱和翻针导块连接柱,并安装在三角母板上;还包括一个连杆;推动装置包括电机和电机轴,电机轴上安装有一槽轮。本发明均是电机直接驱动的,更加可靠,同时不需要其他部件配合,更节省空间;销轴采用纺锤形的外表面,使得部件之间运行更为顺畅,更不容易卡住;感应器失效的情况下,限位槽和限位销的配合可以阻止槽轮过度转动,防止出现事故。

马达传动的横机底板.pdf
本发明涉及一种马达传动的横机底板。目前还没有结构简单,设计合理,性能可靠的马达传动的横机底板。本发明包括底板本体,左、右归位三角板,左、右翻针接针三角板,左、右起针吊目三角板;其特点是:还包括滑板电机,齿轮,齿条,滑板,滑板导向座,翻针马达,翻针凸轮,固定板,轴承,消音板,左、右固定柱,左、右连接柱,左、右压簧,左、右定位柱,左、右凸块,左、右复位弹簧;左、右归位三角板均活动连接在底板本体上,左、右归位三角板上的左、右归位圆柱套位于滑板的左、右滑槽中;左、右翻针接针三角板以及左、右起针吊目三角板均活动连接