
一种基于达芬奇技术的单目视觉位姿测量方法及系统.pdf

猫巷****婉慧


1/10

2/10
3/10
4/10

5/10

6/10

7/10
8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于达芬奇技术的单目视觉位姿测量方法及系统.pdf
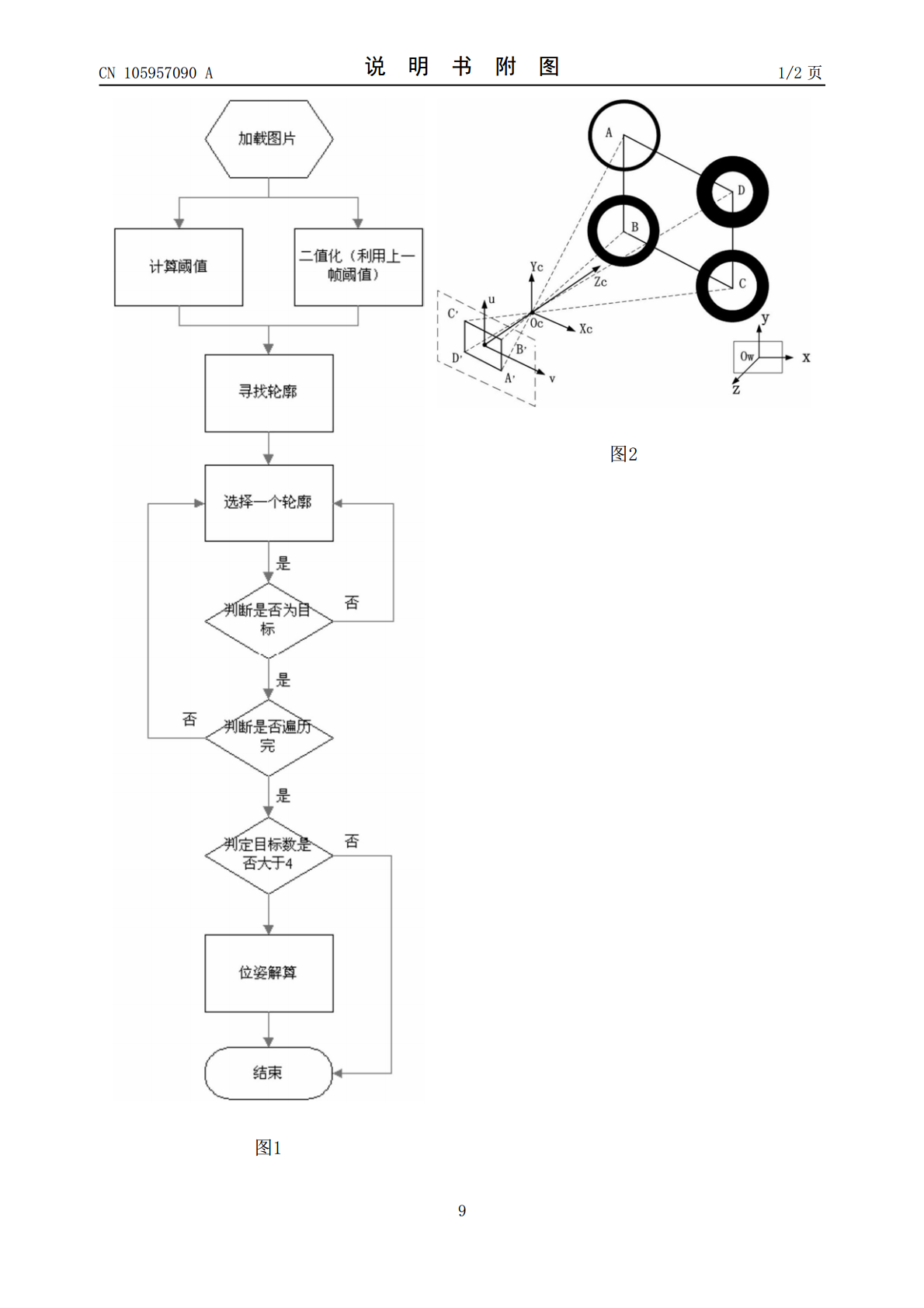
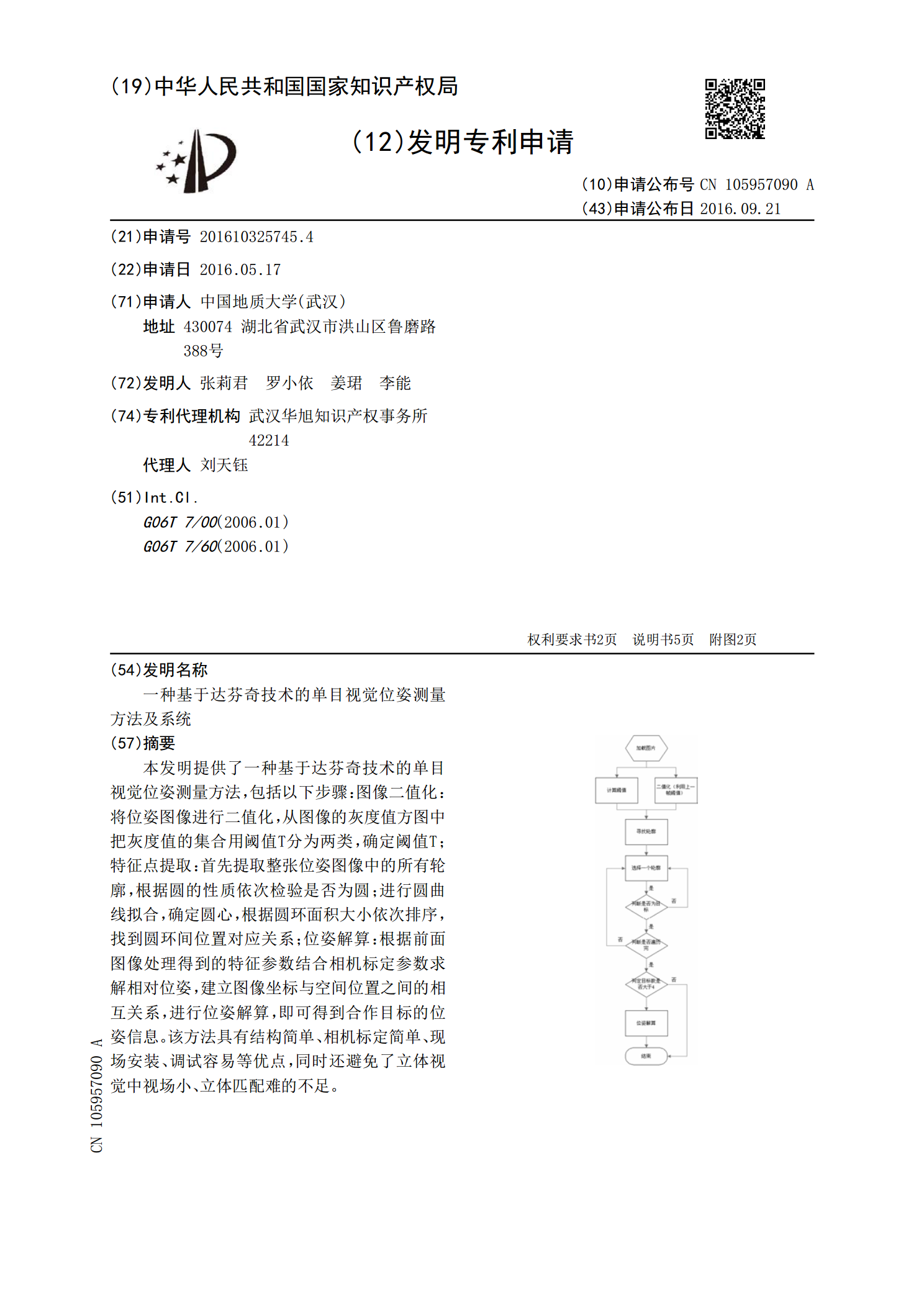
本发明提供了一种基于达芬奇技术的单目视觉位姿测量方法,包括以下步骤:图像二值化:将位姿图像进行二值化,从图像的灰度值方图中把灰度值的集合用阈值T分为两类,确定阈值T;特征点提取:首先提取整张位姿图像中的所有轮廓,根据圆的性质依次检验是否为圆;进行圆曲线拟合,确定圆心,根据圆环面积大小依次排序,找到圆环间位置对应关系;位姿解算:根据前面图像处理得到的特征参数结合相机标定参数求解相对位姿,建立图像坐标与空间位置之间的相互关系,进行位姿解算,即可得到合作目标的位姿信息。该方法具有结构简单、相机标定简单、现场安装
一种基于圆形标志点的单目位姿测量方法.pdf
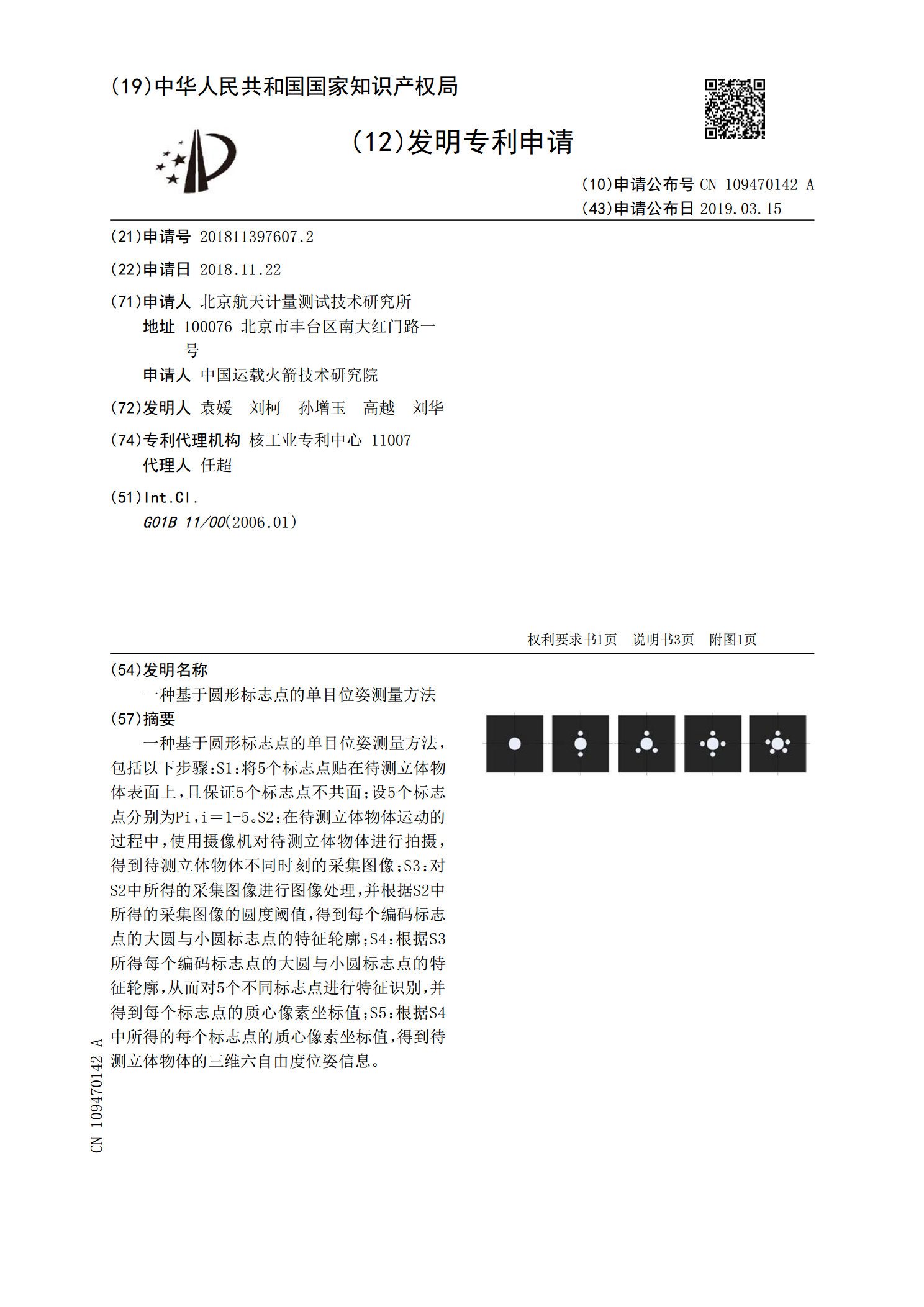
一种基于圆形标志点的单目位姿测量方法,包括以下步骤:S1:将5个标志点贴在待测立体物体表面上,且保证5个标志点不共面;设5个标志点分别为Pi,i=1‑5。S2:在待测立体物体运动的过程中,使用摄像机对待测立体物体进行拍摄,得到待测立体物体不同时刻的采集图像;S3:对S2中所得的采集图像进行图像处理,并根据S2中所得的采集图像的圆度阈值,得到每个编码标志点的大圆与小圆标志点的特征轮廓;S4:根据S3所得每个编码标志点的大圆与小圆标志点的特征轮廓,从而对5个不同标志点进行特征识别,并得到每个标志点的质心像素坐

基于单目视觉的简便零件位姿测量方法.docx
基于单目视觉的简便零件位姿测量方法一、前言随着工业自动化程度的不断提高,对于零件位姿测量的精度和效率也越来越高。传统的位姿测量方法包括激光扫描、相机三维视觉测量、机械臂测量等,但这些方法需要昂贵的设备以及专业技术的支持,使得测量成本相对较高。为此,本文提出了一种简便的、基于单目视觉的零件位姿测量方法,以解决传统方法成本高、难以操作等问题。二、方法思路本文提出的基于单目视觉的零件位姿测量方法基于以下思路:通过对零件的图像进行处理和分析,提取出零件的几何特征,然后通过几何特征进行位姿估计,完成零件的自动定位。

基于单目视觉的简便零件位姿测量方法.pptx
汇报人:/目录0102视觉测量简介单目视觉测量原理及优势测量系统组成03零件位姿定义图像采集与预处理特征提取与匹配位姿计算与误差分析04实验设置与数据采集实验结果展示结果分析与比较误差来源与改进方向05应用场景介绍与传统测量方法的比较优势与应用前景分析06研究结论总结未来研究方向与展望汇报人:

基于单目位姿估计的拉力扭转形变测量方法研究.docx
基于单目位姿估计的拉力扭转形变测量方法研究基于单目位姿估计的拉力扭转形变测量方法研究引言:在工程领域中,拉力扭转形变的测量对于确保结构的稳定性和工程安全性具有重要意义。传统的拉力扭转形变测量方法通常依赖于使用传感器和测量仪器,但这种方法并不一定适用于所有情况,特别是在对于复杂结构或不便于使用传感器的环境下。因此,本文研究了基于单目位姿估计的拉力扭转形变测量方法,以提供一种更灵活和便捷的测量解决方案。1.文献综述:近年来,机器视觉和计算机图像处理的发展为基于单目位姿估计的测量方法提供了坚实的基础。许多研究者