
一种基于多尺度卷积神经网络的交通场景分类方法.pdf

梦影****主a

1/9
2/9

3/9
4/9
5/9

6/9
7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于多尺度卷积神经网络的交通场景分类方法.pdf
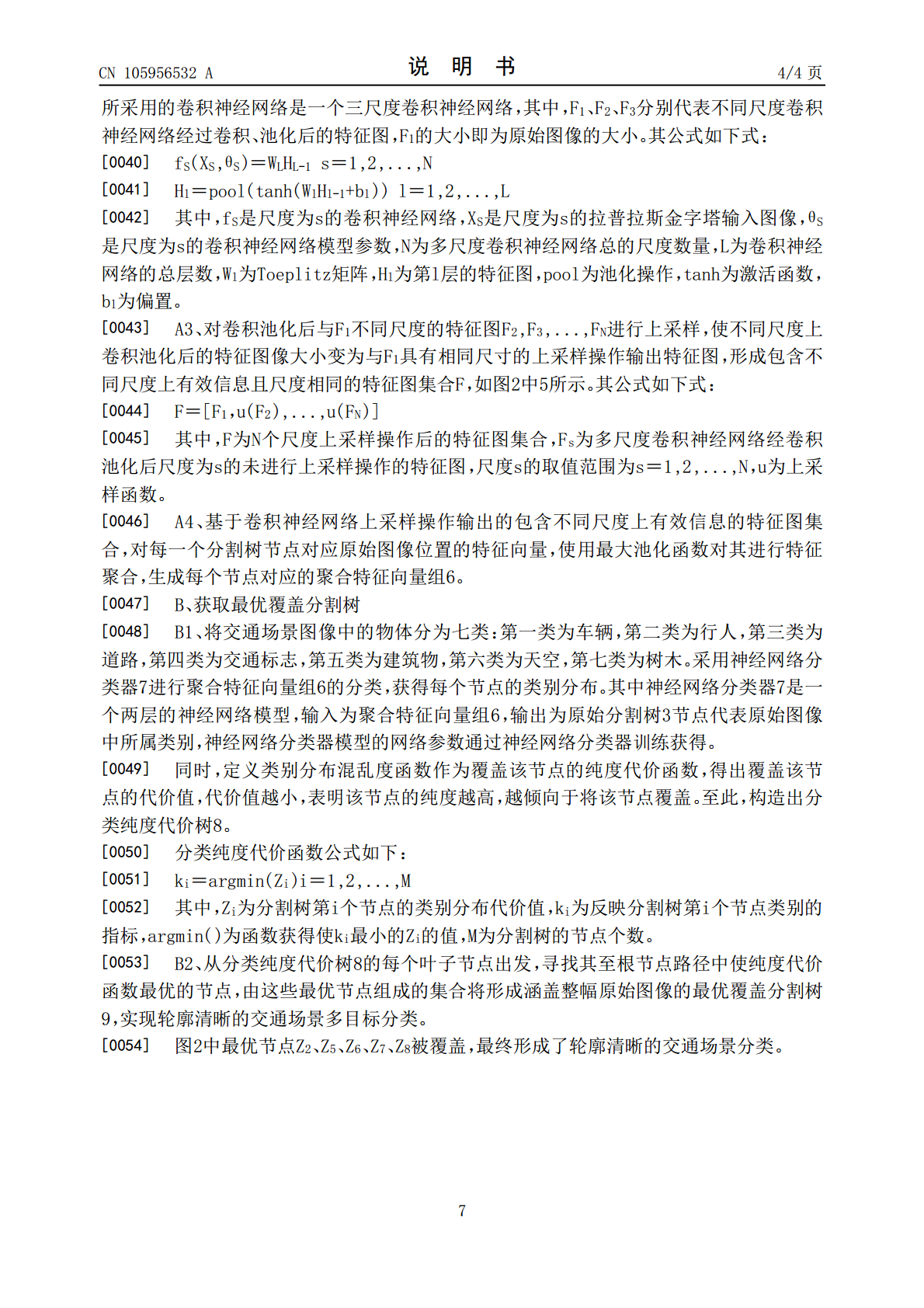
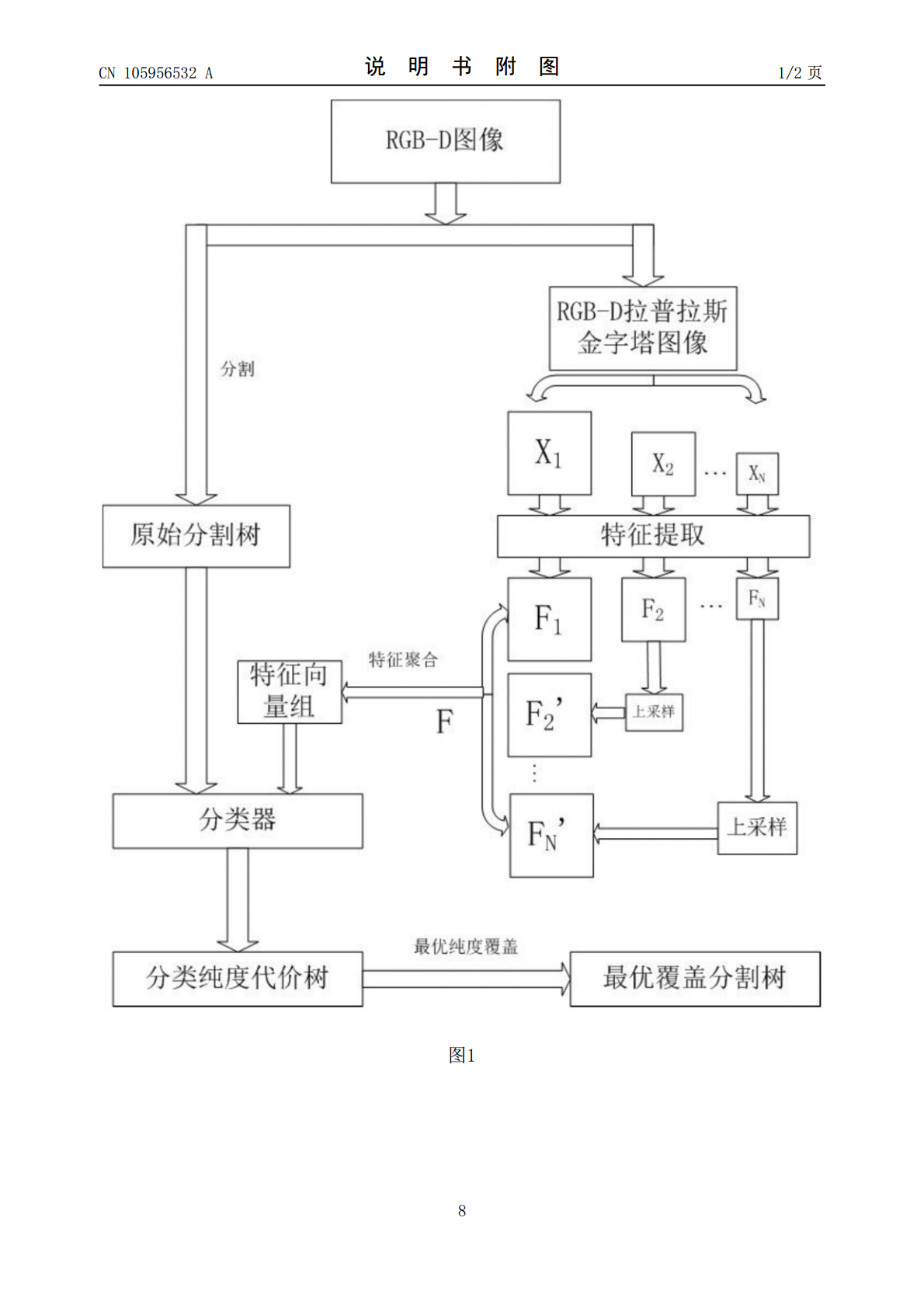
本发明公开了一种交通场景多目标分类方法,包括以下步骤:提取基于多尺度卷积神经网络的隐性特征;获取最优覆盖分割树。本发明在实现交通场景分类的过程中,采用多尺度卷积神经网络,通过对原始图像在不同尺度上有效提取具有不变性的优秀隐性特征,相比于单一尺度的卷积神经网络,实现了图像更加丰富有效特征信息的获取。本发明通过将卷积神经网络提取的有效信息与图像的原始分割树结合,形成最优纯度代价树,并进行最优纯度的覆盖,实现了获得更加清晰的目标轮廓,增加了分类的准确性。本发明通过将RGB‑D作为卷积神经网络输入,相比传统RGB
一种基于多尺度级联卷积神经网络的叶片高光谱图像分类和回归方法.pdf
本发明属于植物科学研究领域,公开了一种基于多尺度级联卷积神经网络的叶片高光谱图像分类和回归方法,首先,在3D‑CNN中,嵌入扩张卷积构建了不同尺度的谱空特征提取结构,实现多尺度特征的融合;其次,在3D‑CNN后级联1D‑CNN以进一步提取高级抽象光谱特征,并对提出的多尺度3D‑1D‑CNN网络进行最优框架探索;最后,在两个样本有限的设施作物叶片数据集上,将所提出的多尺度3D‑1D‑CNN网络模型与基准模型及多尺度3D‑CNN模型进行比较,以验证所提方法的有效性。本发明方法有助于叶片高光谱图像的分类和回归,
基于自补偿卷积神经网络的遥感场景图像分类方法.pdf
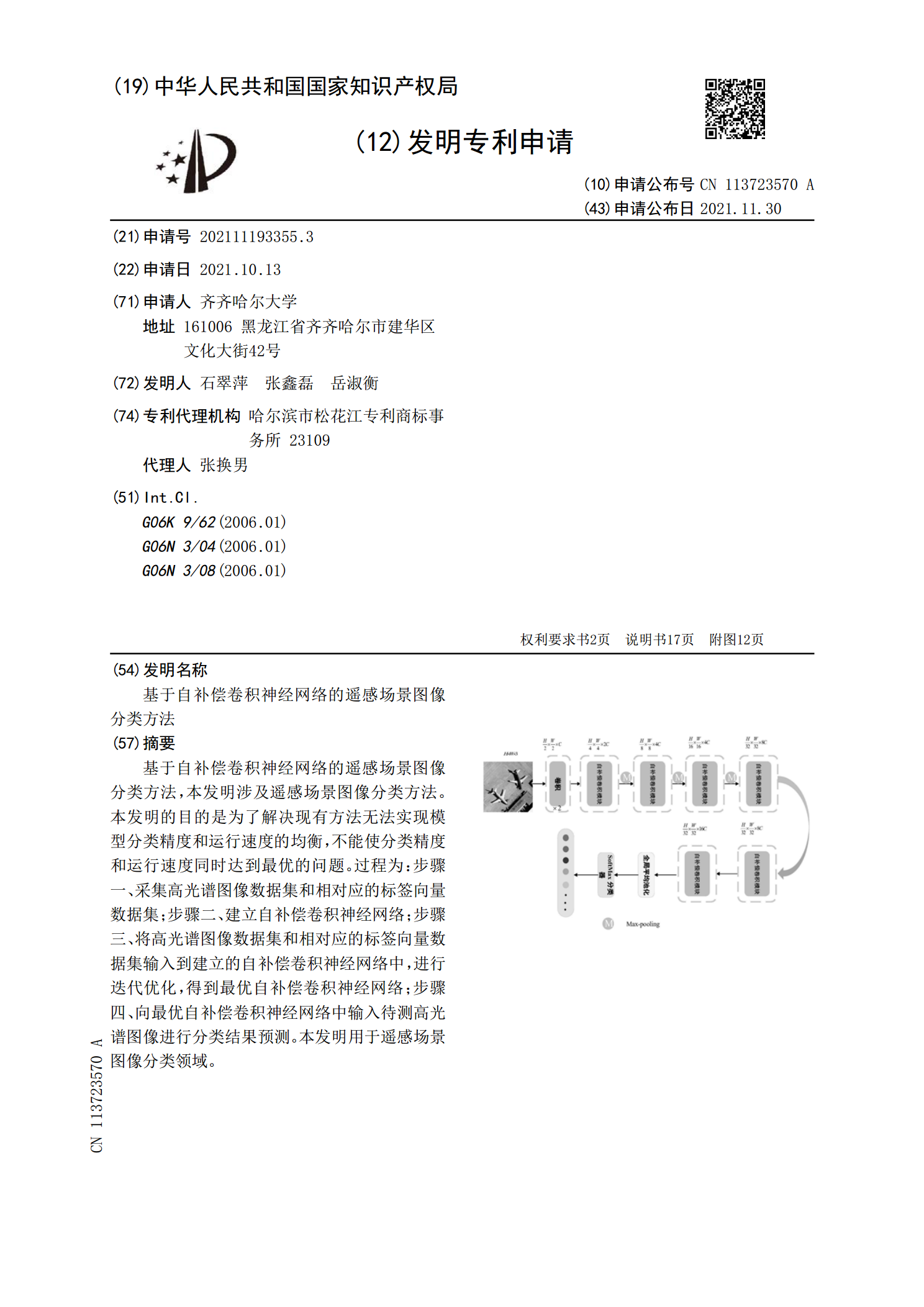
基于自补偿卷积神经网络的遥感场景图像分类方法,本发明涉及遥感场景图像分类方法。本发明的目的是为了解决现有方法无法实现模型分类精度和运行速度的均衡,不能使分类精度和运行速度同时达到最优的问题。过程为:步骤一、采集高光谱图像数据集和相对应的标签向量数据集;步骤二、建立自补偿卷积神经网络;步骤三、将高光谱图像数据集和相对应的标签向量数据集输入到建立的自补偿卷积神经网络中,进行迭代优化,得到最优自补偿卷积神经网络;步骤四、向最优自补偿卷积神经网络中输入待测高光谱图像进行分类结果预测。本发明用于遥感场景图像分类领域

一种基于多尺度卷积神经网络的金融指数预测方法.pdf
本发明提供一种基于多尺度卷积神经网络的金融指数预测方法,包括以下步骤:构建训练样本集;构建多尺度卷积神经网络;采用所述训练样本集,对所述多尺度卷积神经网络进行训练,得到训练好的多尺度卷积神经网络;采集当前时间段n个不同时间尺度的金融指数序列,经过预处理后,输入训练完成的多尺度卷积神经网络,输出当日收盘时金融指数涨、金融指数跌或金融指数平的预测结果,进而指导当前是否购买对应金融指数的交易。本发明充分利用不同时间尺度数据中蕴含的信息,对不同尺度的金融指数序列进行融合,能够更综合准确的反映同一个时间段的金融指数
基于多尺度卷积组与并行的卷积神经网络图像去噪方法.pdf
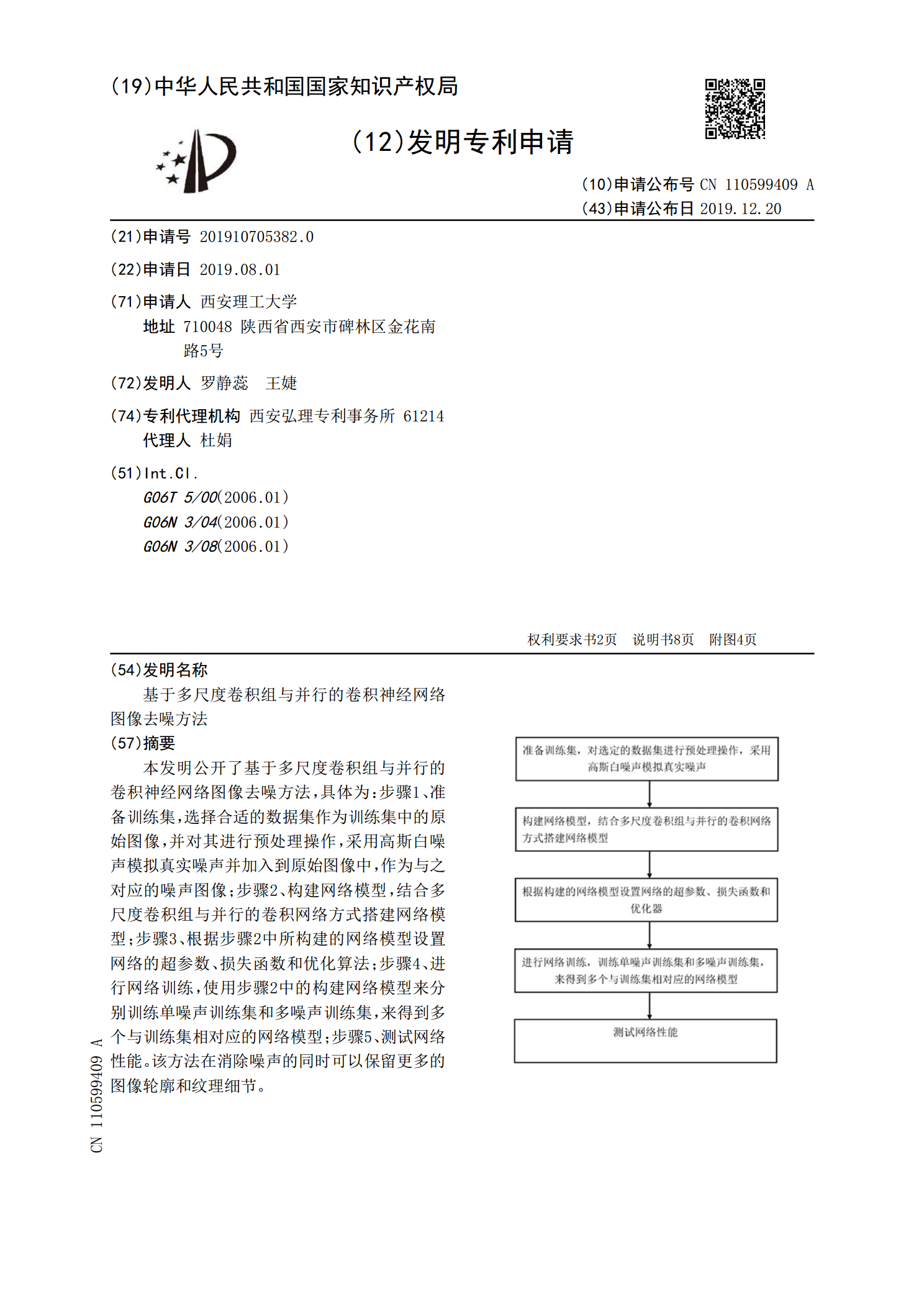
本发明公开了基于多尺度卷积组与并行的卷积神经网络图像去噪方法,具体为:步骤1、准备训练集,选择合适的数据集作为训练集中的原始图像,并对其进行预处理操作,采用高斯白噪声模拟真实噪声并加入到原始图像中,作为与之对应的噪声图像;步骤2、构建网络模型,结合多尺度卷积组与并行的卷积网络方式搭建网络模型;步骤3、根据步骤2中所构建的网络模型设置网络的超参数、损失函数和优化算法;步骤4、进行网络训练,使用步骤2中的构建网络模型来分别训练单噪声训练集和多噪声训练集,来得到多个与训练集相对应的网络模型;步骤5、测试网络性能