
组合模具滑轮控制行走技术.pdf

猫巷****熙柔

1/5
2/5
3/5
4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
组合模具滑轮控制行走技术.pdf
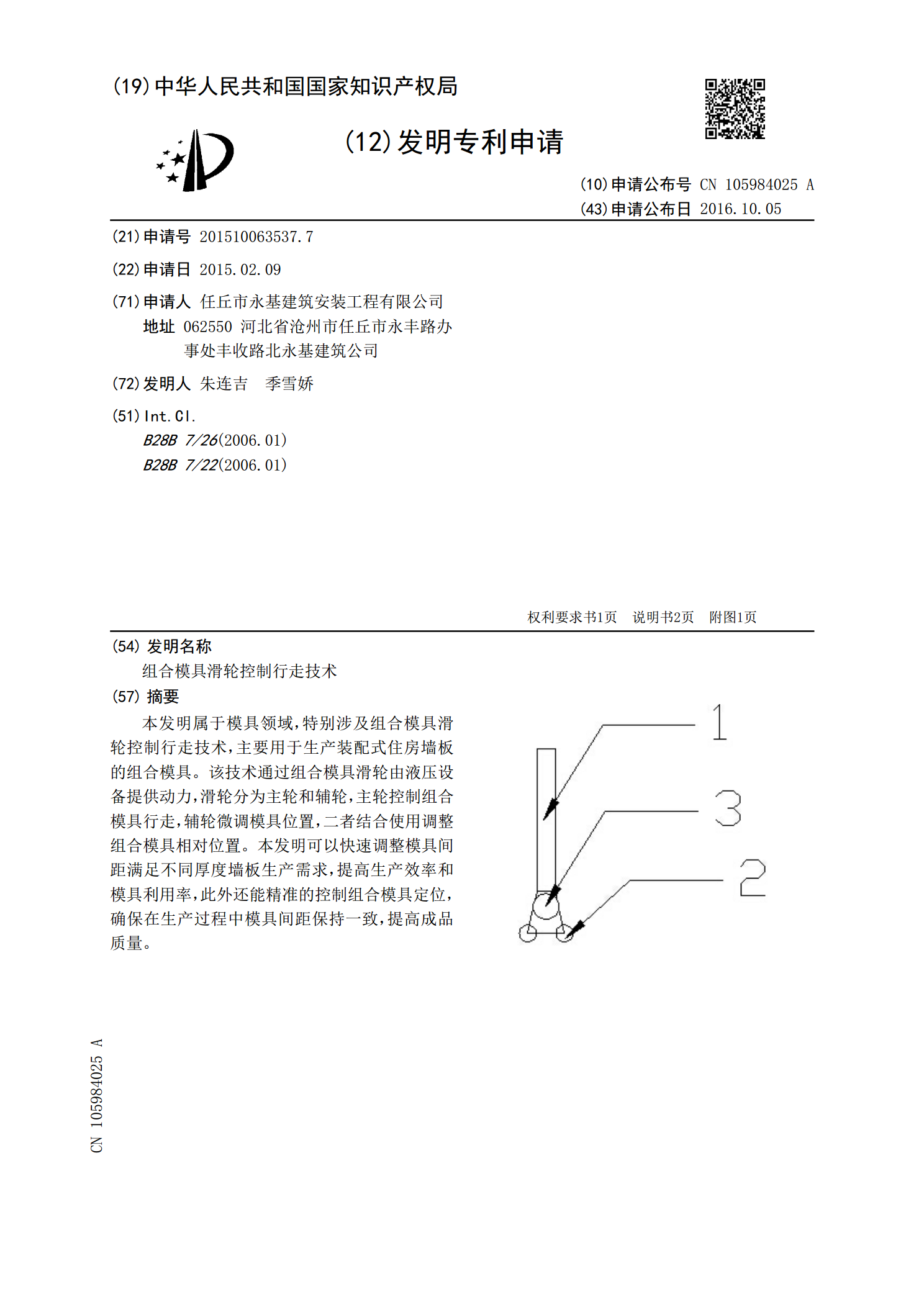
本发明属于模具领域,特别涉及组合模具滑轮控制行走技术,主要用于生产装配式住房墙板的组合模具。该技术通过组合模具滑轮由液压设备提供动力,滑轮分为主轮和辅轮,主轮控制组合模具行走,辅轮微调模具位置,二者结合使用调整组合模具相对位置。本发明可以快速调整模具间距满足不同厚度墙板生产需求,提高生产效率和模具利用率,此外还能精准的控制组合模具定位,确保在生产过程中模具间距保持一致,提高成品质量。
混凝土箱式组合模具行走技术.pdf
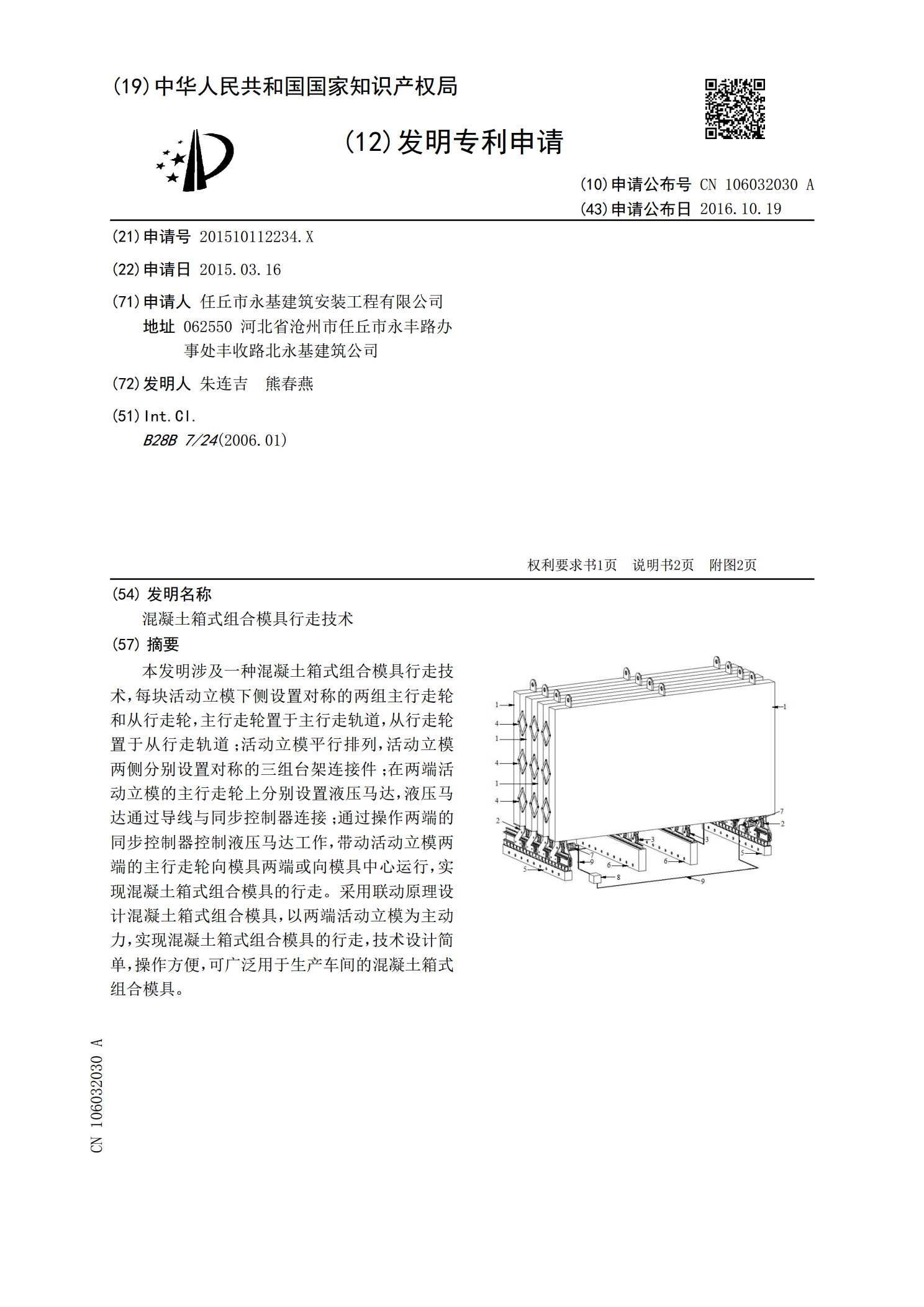
本发明涉及一种混凝土箱式组合模具行走技术,每块活动立模下侧设置对称的两组主行走轮和从行走轮,主行走轮置于主行走轨道,从行走轮置于从行走轨道;活动立模平行排列,活动立模两侧分别设置对称的三组台架连接件;在两端活动立模的主行走轮上分别设置液压马达,液压马达通过导线与同步控制器连接;通过操作两端的同步控制器控制液压马达工作,带动活动立模两端的主行走轮向模具两端或向模具中心运行,实现混凝土箱式组合模具的行走。采用联动原理设计混凝土箱式组合模具,以两端活动立模为主动力,实现混凝土箱式组合模具的行走,技术设计简单,操
一种建筑内墙板组合模具自动行走技术.pdf
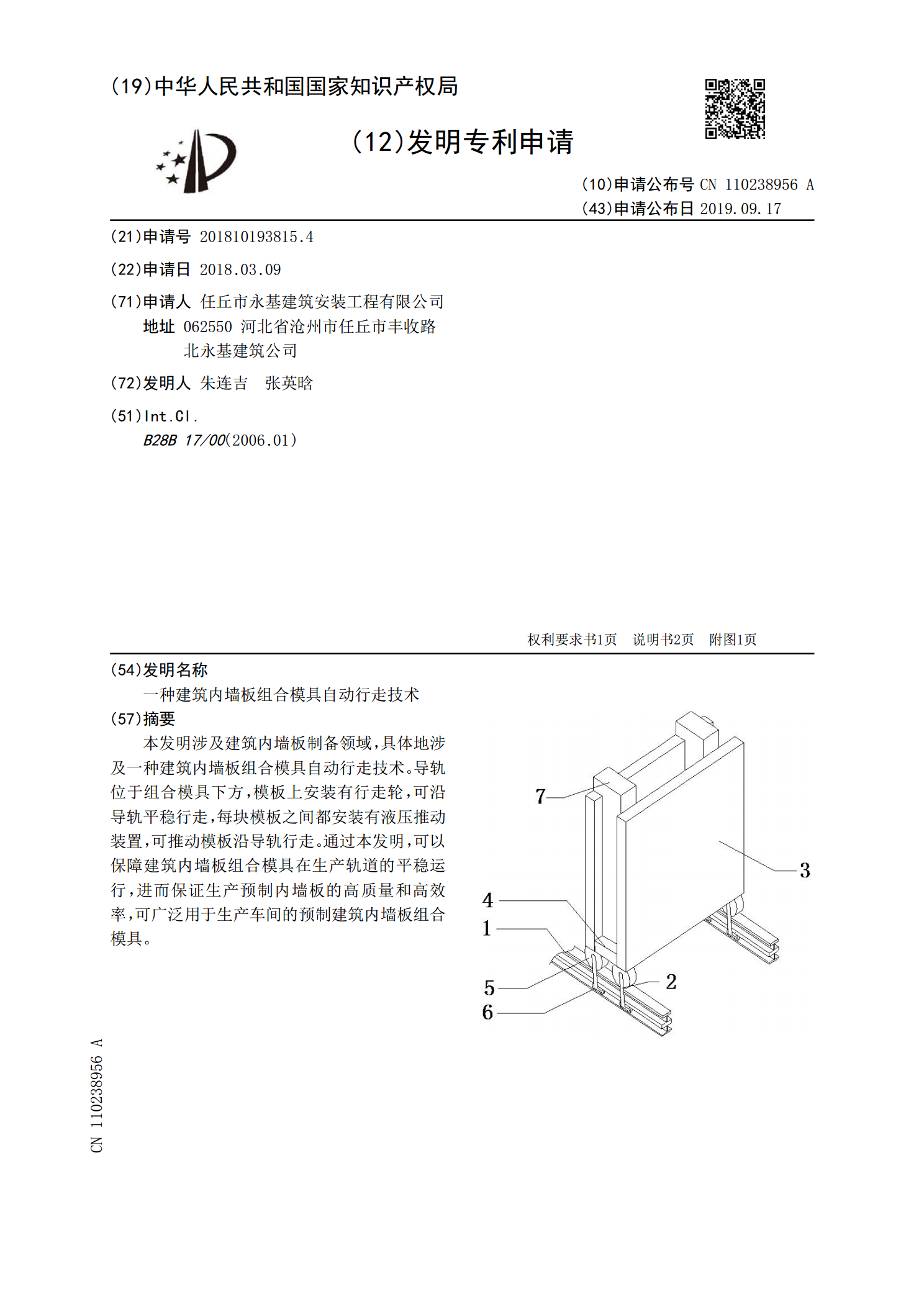
本发明涉及建筑内墙板制备领域,具体地涉及一种建筑内墙板组合模具自动行走技术。导轨位于组合模具下方,模板上安装有行走轮,可沿导轨平稳行走,每块模板之间都安装有液压推动装置,可推动模板沿导轨行走。通过本发明,可以保障建筑内墙板组合模具在生产轨道的平稳运行,进而保证生产预制内墙板的高质量和高效率,可广泛用于生产车间的预制建筑内墙板组合模具。
钻机行走上滑轮.pdf
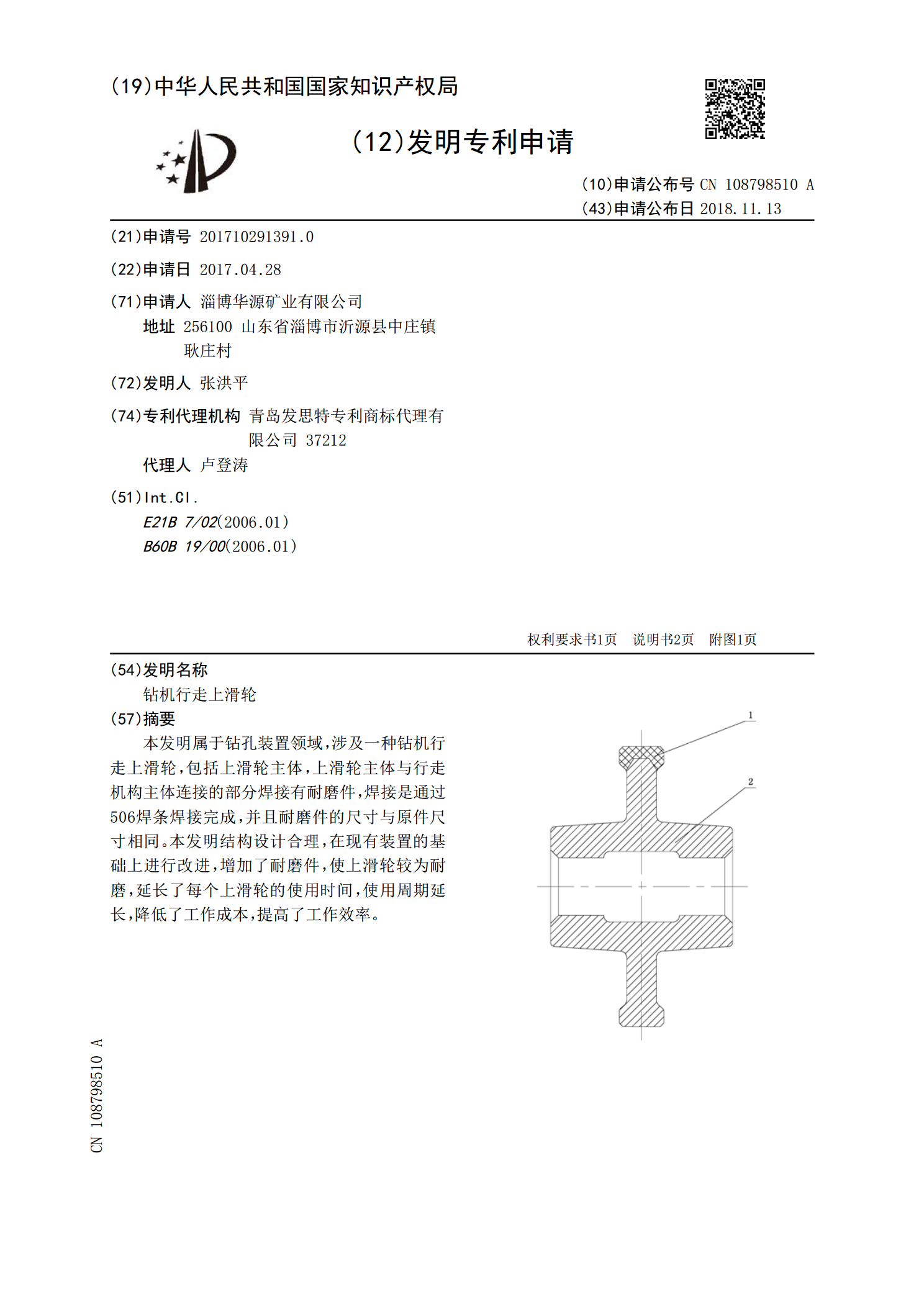
本发明属于钻孔装置领域,涉及一种钻机行走上滑轮,包括上滑轮主体,上滑轮主体与行走机构主体连接的部分焊接有耐磨件,焊接是通过506焊条焊接完成,并且耐磨件的尺寸与原件尺寸相同。本发明结构设计合理,在现有装置的基础上进行改进,增加了耐磨件,使上滑轮较为耐磨,延长了每个上滑轮的使用时间,使用周期延长,降低了工作成本,提高了工作效率。
潜孔钻行走滑轮.pdf
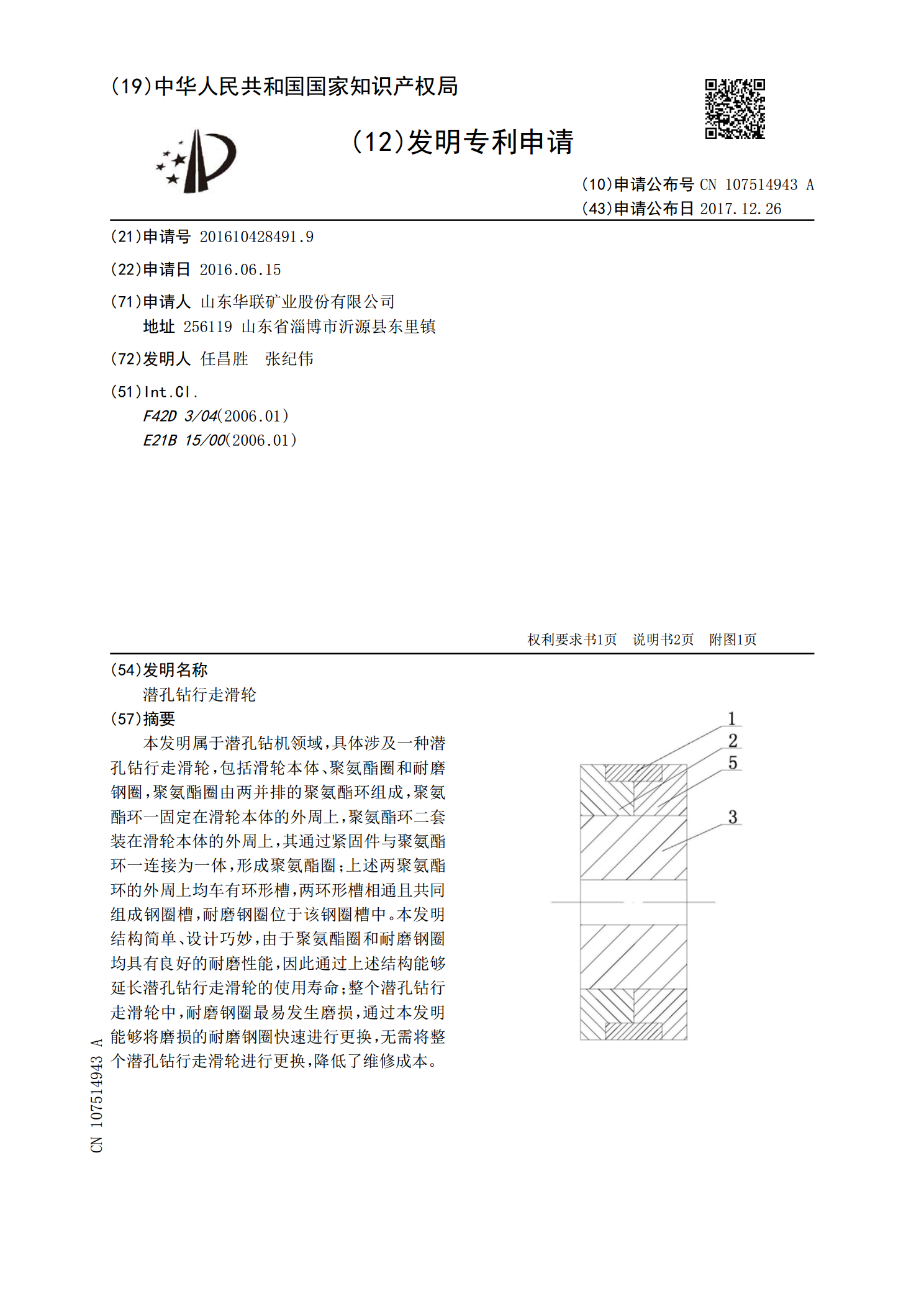
本发明属于潜孔钻机领域,具体涉及一种潜孔钻行走滑轮,包括滑轮本体、聚氨酯圈和耐磨钢圈,聚氨酯圈由两并排的聚氨酯环组成,聚氨酯环一固定在滑轮本体的外周上,聚氨酯环二套装在滑轮本体的外周上,其通过紧固件与聚氨酯环一连接为一体,形成聚氨酯圈;上述两聚氨酯环的外周上均车有环形槽,两环形槽相通且共同组成钢圈槽,耐磨钢圈位于该钢圈槽中。本发明结构简单、设计巧妙,由于聚氨酯圈和耐磨钢圈均具有良好的耐磨性能,因此通过上述结构能够延长潜孔钻行走滑轮的使用寿命;整个潜孔钻行走滑轮中,耐磨钢圈最易发生磨损,通过本发明能够将磨损