
海洋钻井平台及海洋钻井平台的升降装置.pdf

盼易****君a


1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
海洋钻井平台及海洋钻井平台的升降装置.pdf
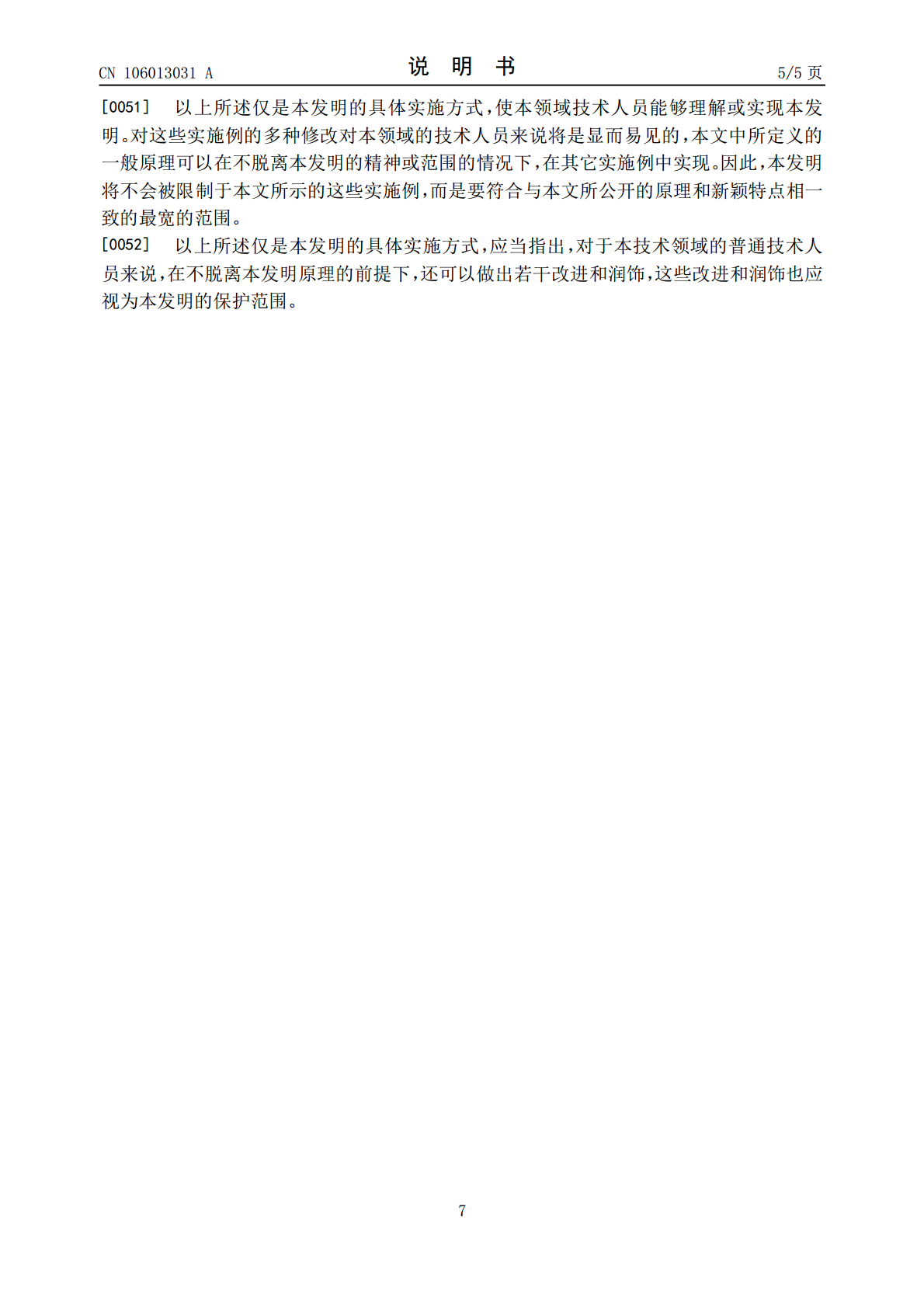
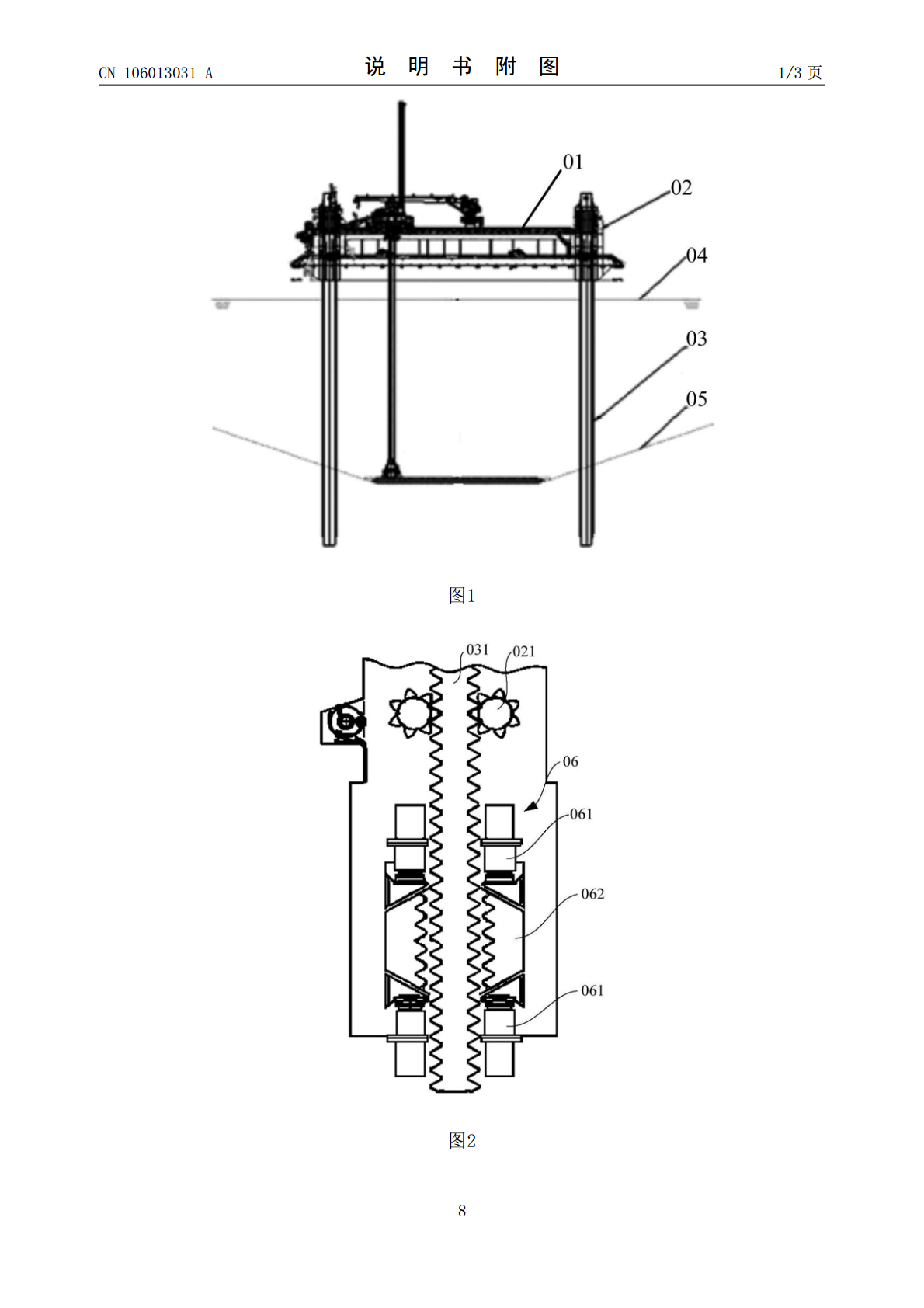
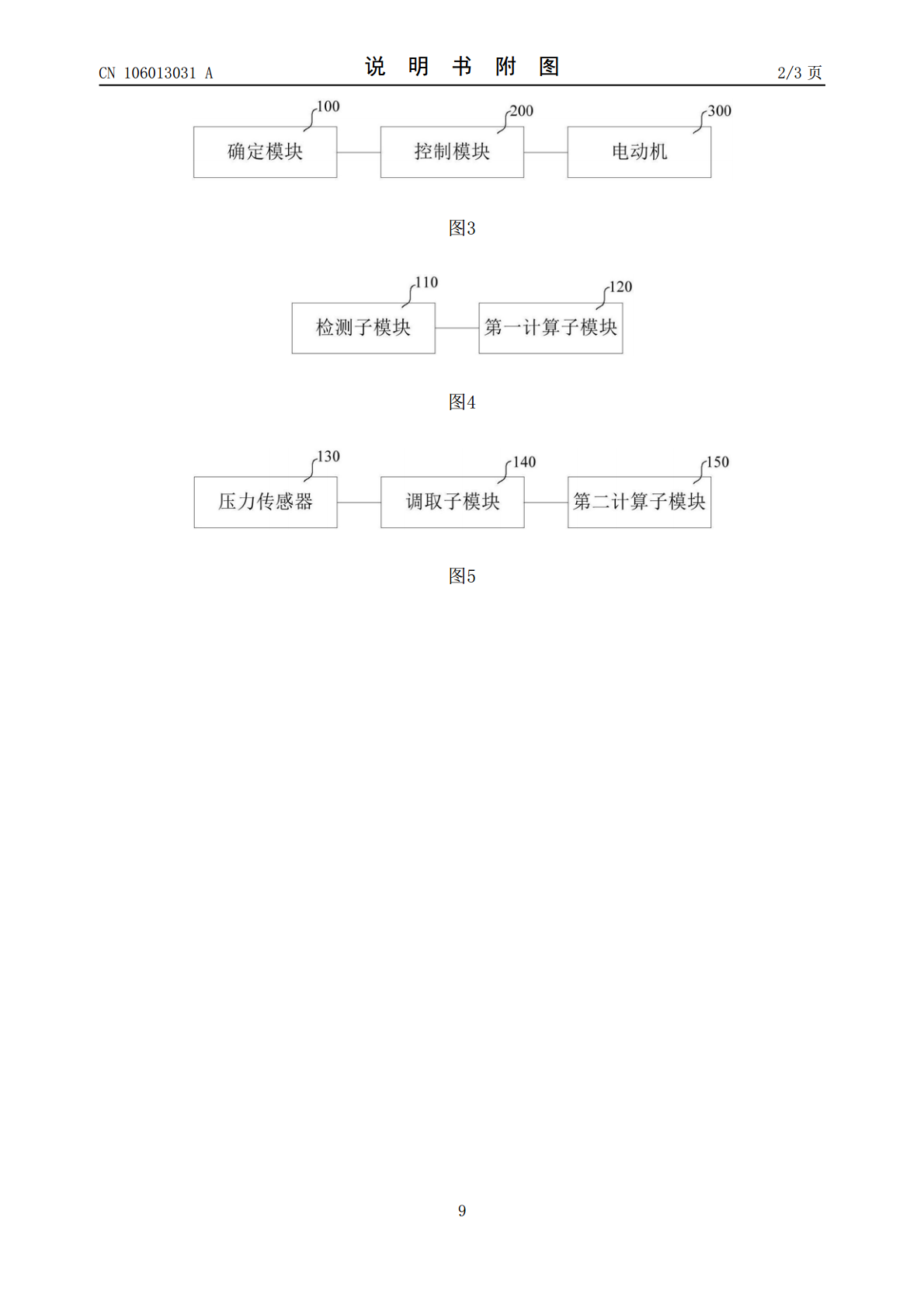
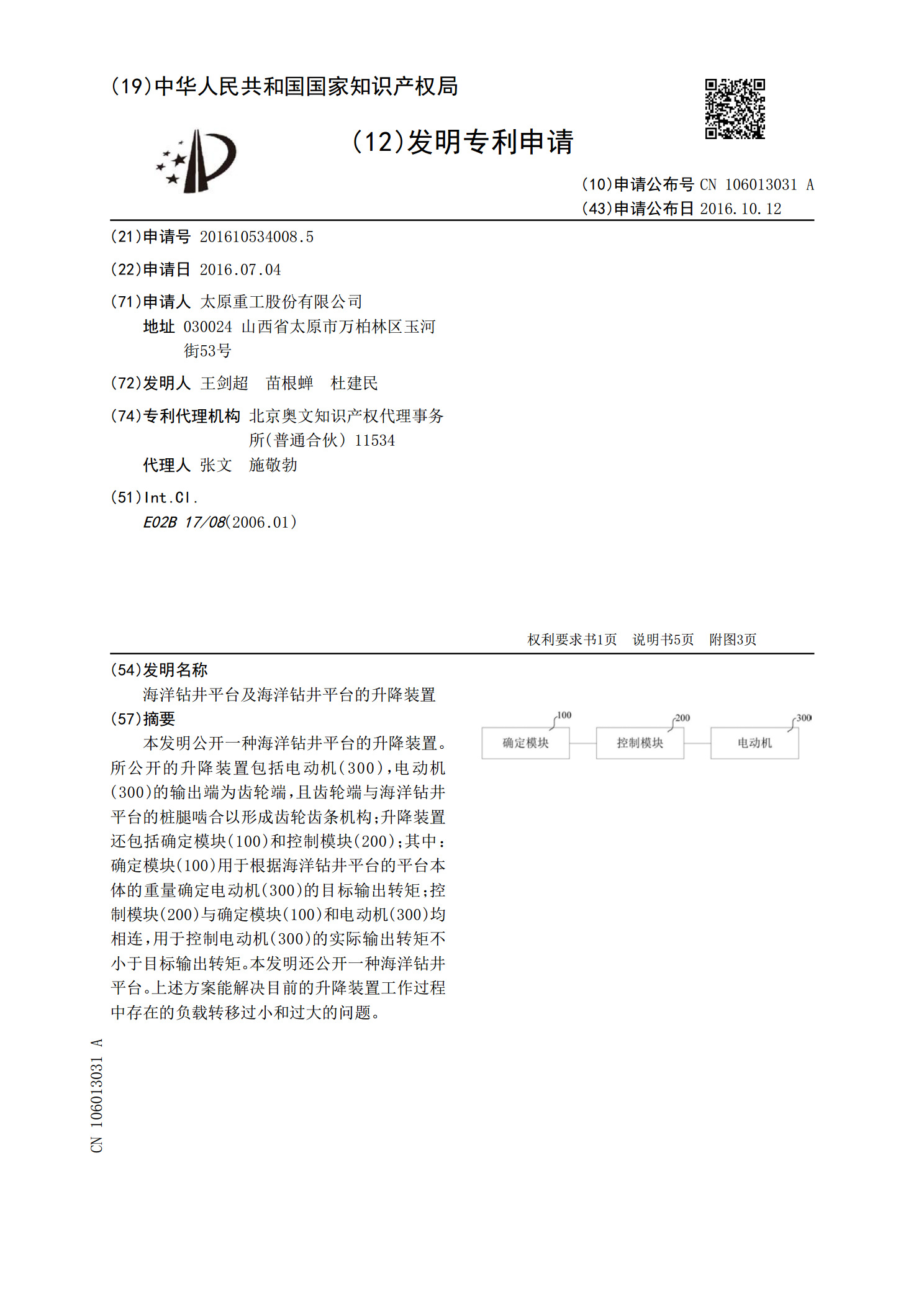
本发明公开一种海洋钻井平台的升降装置。所公开的升降装置包括电动机(300),电动机(300)的输出端为齿轮端,且齿轮端与海洋钻井平台的桩腿啮合以形成齿轮齿条机构;升降装置还包括确定模块(100)和控制模块(200);其中:确定模块(100)用于根据海洋钻井平台的平台本体的重量确定电动机(300)的目标输出转矩;控制模块(200)与确定模块(100)和电动机(300)均相连,用于控制电动机(300)的实际输出转矩不小于目标输出转矩。本发明还公开一种海洋钻井平台。上述方案能解决目前的升降装置工作过程中存在的负

自升式海洋钻井平台升降装置.pdf
本发明涉及一种自升式海洋钻井平台升降装置,包括平行轴减速器机构以及行星齿轮减速组件;所述平行轴减速机构包括箱体总成、输入齿轮轴系和平行齿轮轴系,其中输入齿轮轴系联接电机,平行齿轮轴系联接行星齿轮减速组件;所述行星齿轮减速组件包括三组行星齿轮减速机构,其中一级行星齿轮减速机构的一级太阳轮联接所述平行齿轮轴系,所述一级行星齿轮减速机构的一级行星架与二级行星齿轮减速机构的二级太阳轮联接,所述二级行星齿轮减速机构的二级行星架与三级行星齿轮减速机构的三级太阳轮联接,所述三级行星齿轮减速机构的三级行星架与所述主输出轴

新型自升式海洋钻井平台升降装置.pdf
本发明公开了一种新型自升式海洋钻井平台升降装置,其交错轴及平行轴齿轮减速机构的箱体内安装有输入轴系、减速轴系和输出轴系,所述输出轴系为少齿差行星齿轮减速机构的曲轴,所述少齿差行星齿轮减速机构和NGW行星齿轮减速机构的内齿圈分别设置在同一壳体的内圆表面上,该壳体的一端与所述箱体联接,其另一端与大法兰联接,所述大法兰安装在平台主结构架上,所述少齿差行星齿轮减速机构的行星架与所述NGW行星齿轮减速机构的太阳轮轮轴联接;所述NGW行星齿轮减速机构的行星架与七齿输出轴联接,所述七齿输出轴上安装有七齿齿轮。本发明采用

海洋钻井平台.ppt
EvolutionofOffshoreDrillingUnits29/25/202439/25/202449/25/202459/25/202469/25/202479/25/202489/25/202499/25/2024109/25/2024119/25/2024129/25/2024139/25/2024149/25/2024159/25/2024169/25/2024179/25/2024189/25/2024199/25/2024209/25/2024219/25/2024229/25/2024

海洋钻井平台简介.docx
海洋钻井平台简介海洋钻井平台(drillingplatform)是主要用于钻探井的海上结构物。平台上装钻井、动力、通讯、导航等设备,以及安全救生和人员生活设施,是海上油气勘探开发不可缺少的手段。主要分为移动平台和固定式平台两大类。其中按结构又可分为:(1)移动式平台:坐底式平台、自升式平台、钻井船、半潜式平台、张力腿式平台、牵索塔式平台(2)固定式平台:导管架式平台、混凝土重力式平台、深水顺应塔式平台坐底式钻井平台坐底式钻井平台又叫钻驳或插桩钻驳,适用于河流和海湾等30m以下的浅水域。坐底式平台有两个船体