
一种手动三工位操作机构.pdf

哲妍****彩妍


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种手动三工位操作机构.pdf
本发明提供一种手动三工位操作机构,包括锥形齿轮、前固定板、后固定板、解锁部件、锁止卡爪、锁止圆盘、黄铜隔套、间隔套、解锁保持、状态显示部件和支撑柱,所述的前固定板和后固定板通过两根支撑柱连接;锥形齿轮与锁止卡爪、锁止圆盘、黄铜隔套和间隔套同轴安装;简化了中压环网柜用的三工位机构的操作过程,在不更换操作孔,也不需要拔出操作手柄的情况下将隔离刀从母线位置操作至接地位置,且不需要增加额外的连锁;提高了环网柜的可靠性,并降低了成本。
一种电动兼手动两工位弹簧操作机构.pdf
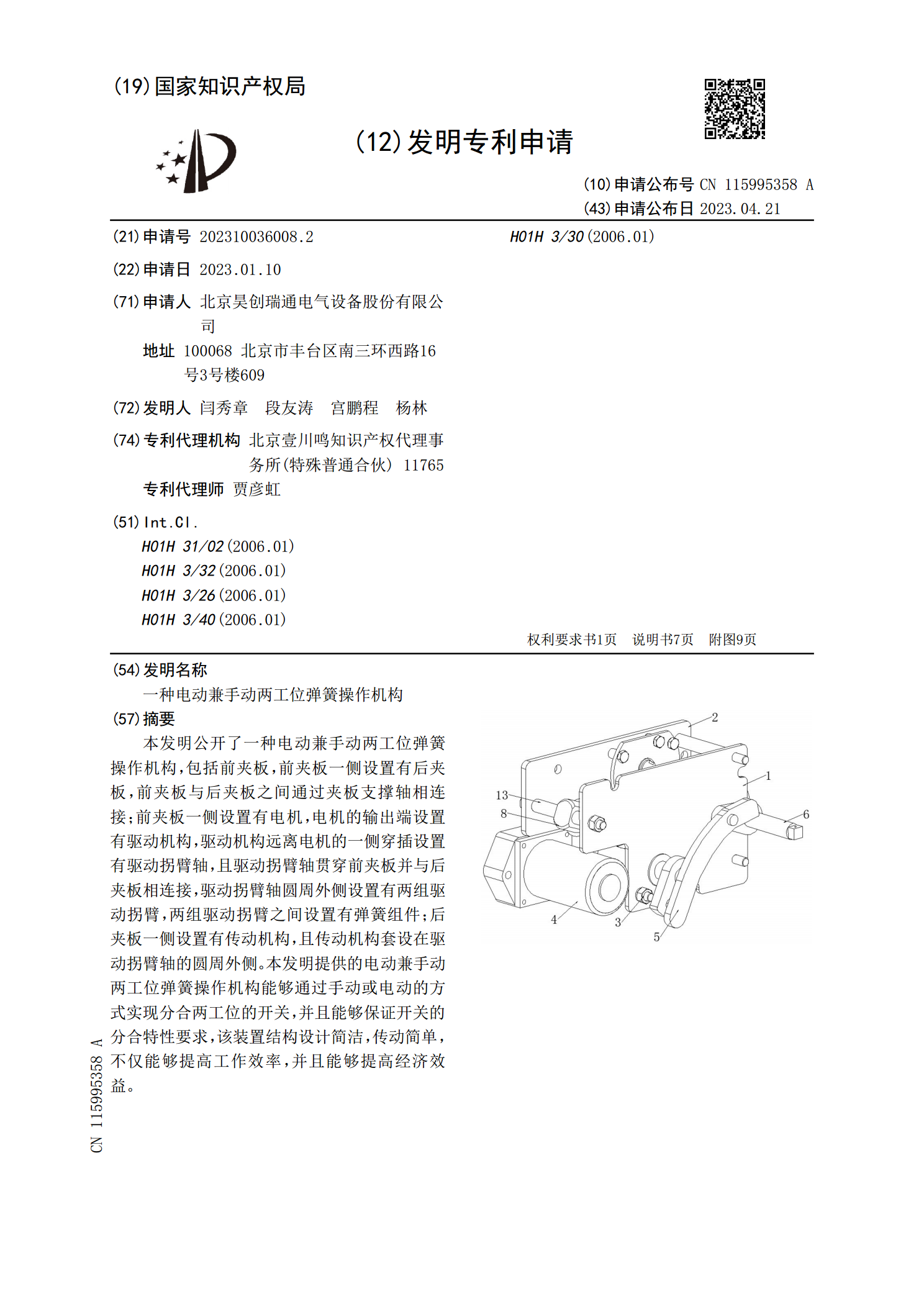
本发明公开了一种电动兼手动两工位弹簧操作机构,包括前夹板,前夹板一侧设置有后夹板,前夹板与后夹板之间通过夹板支撑轴相连接;前夹板一侧设置有电机,电机的输出端设置有驱动机构,驱动机构远离电机的一侧穿插设置有驱动拐臂轴,且驱动拐臂轴贯穿前夹板并与后夹板相连接,驱动拐臂轴圆周外侧设置有两组驱动拐臂,两组驱动拐臂之间设置有弹簧组件;后夹板一侧设置有传动机构,且传动机构套设在驱动拐臂轴的圆周外侧。本发明提供的电动兼手动两工位弹簧操作机构能够通过手动或电动的方式实现分合两工位的开关,并且能够保证开关的分合特性要求,该

三工位开关手动操动机构及三工位开关.pdf
本发明涉及三工位开关手动操动机构及三工位开关;三工位开关手动操动机构包括壳体、隔离输入轴、接地输入轴和蜗轮轴,隔离输入轴上设有卡槽,隔离输入轴上转动安装有限位套,蜗轮轴上安装有限位套驱动齿轮,限位套上设有避让孔,限位套具有让开位和封堵位;壳体中设有用于限制隔离输入轴转动方向的棘爪,棘爪具有两个沿隔离输入轴径向卡在隔离输入轴外围的棘爪部分,两棘爪部分对与隔离输入轴的限制转动方向相反,所述壳体上还设有用于拨动所述棘爪摆动以控制对应棘爪部分与隔离输入轴接触或脱离的切换结构。相比于现有技术,三工位开关的各工作位置

一种高压开关用手动操纵三工位机构.pdf
本发明涉及一种高压开关用手动操纵三工位机构,包括相互啮合的涡轮和蜗杆,以及位于所述涡轮两侧的左操作杆和右操作杆,所述左操作杆和右操作杆上分别通过螺纹连接有螺套;还包括分别穿设在铰轴上的左连板和右连板,所述左连板和右连板相远离的一端分别套设在左操作杆、右操作杆上的螺套前方,左连板和右连板相靠近的一端之间设有安装在所述涡轮上的定位机构,两铰轴和涡轮之间分别固设有挡杆,两铰轴上均设有固定设置的扭簧。本发明通过左连板和右连板对涡轮的转动实现控制,并手动操作使螺套发生轴向位移,从而实现左、中、右三个工位,相应地实现

一种三工位机构手动联锁及其互锁装置.pdf
本发明公开了一种三工位机构手动联锁及其互锁装置,包括设置在机构上的侧板,及设在侧板上的DS挡板和ES挡板,在侧板前端水平设置有机械互锁装置支撑板、沿侧板垂直滑动连接的一对驱动销,以及沿驱动销内侧平行设置的一对凸轮,支撑板上设有相对滑动的互锁销,互锁销与DS挡板和ES挡板上的闭锁孔相对应;与互锁销相对应的支撑板内侧连接在轴销上有一对驱动杠杆;其一端与驱动销相配合;通过手动或电动操作,驱动销联动驱动杠杆转动,互锁销在驱动杠杆作用下动作插入DS挡板或ES挡板上的闭锁孔来闭锁DS挡板或ES挡板。本发明在手动操作至