
多工位机器人喷涂转台.pdf

念珊****写意

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

多工位机器人喷涂转台.pdf
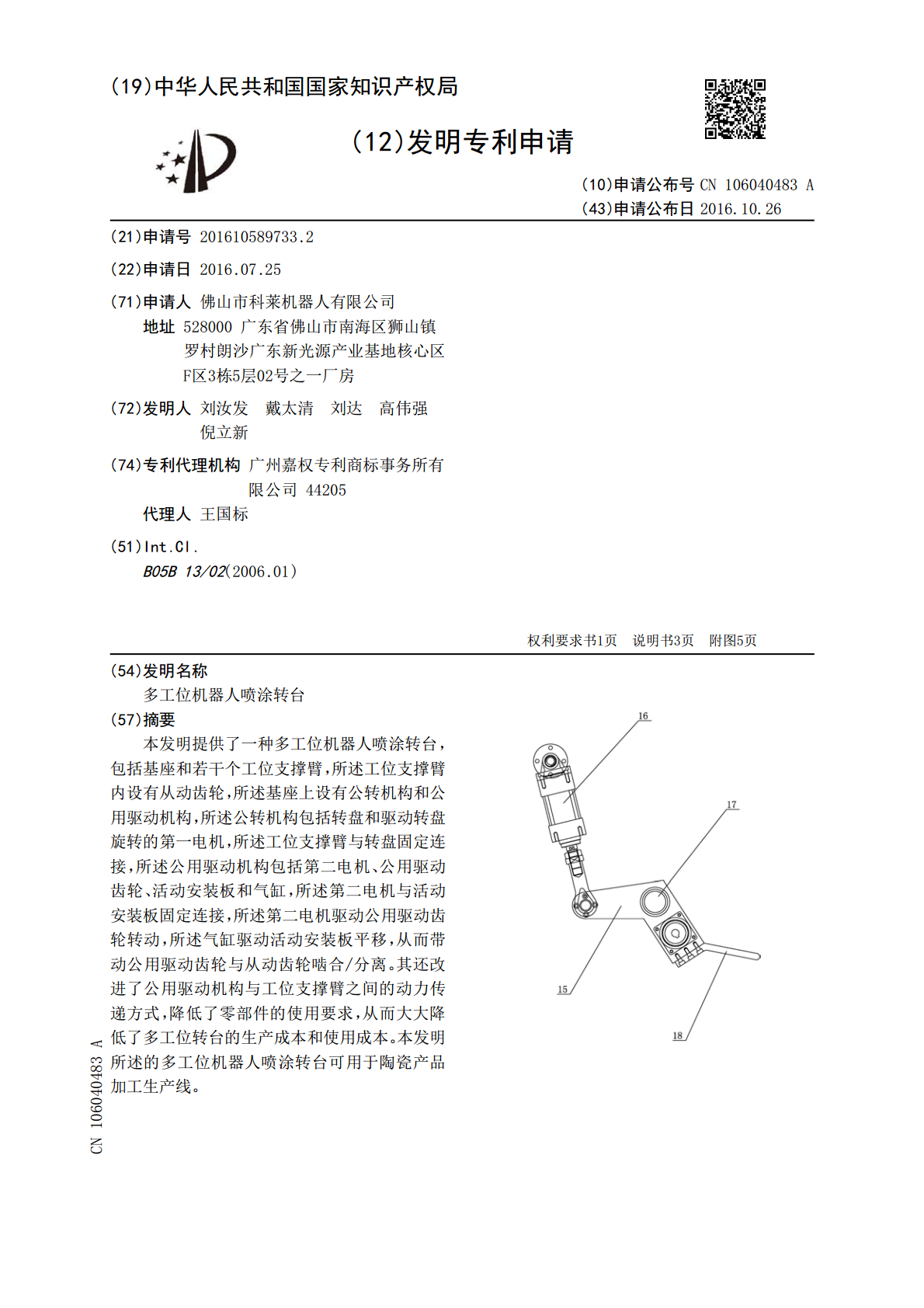
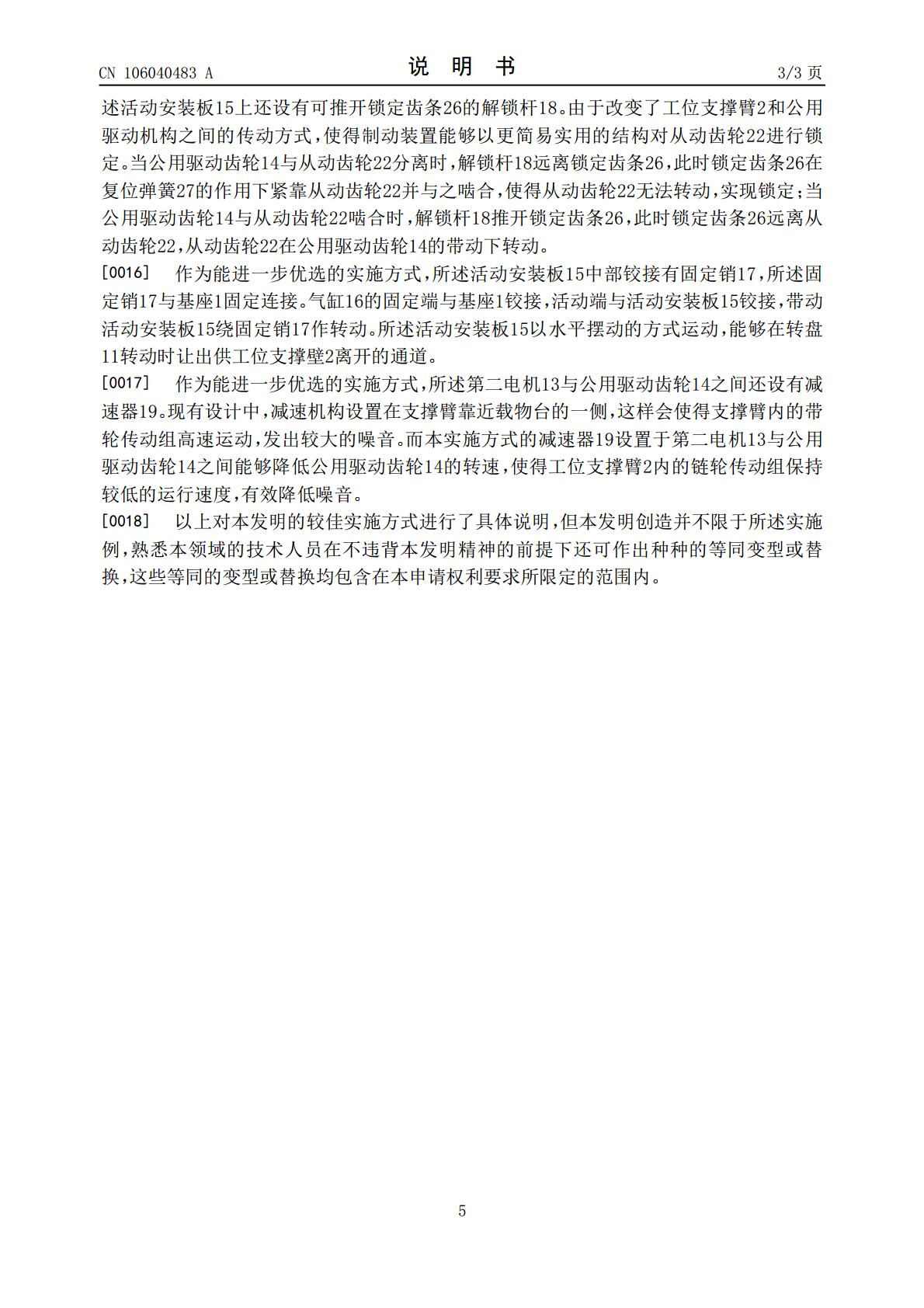
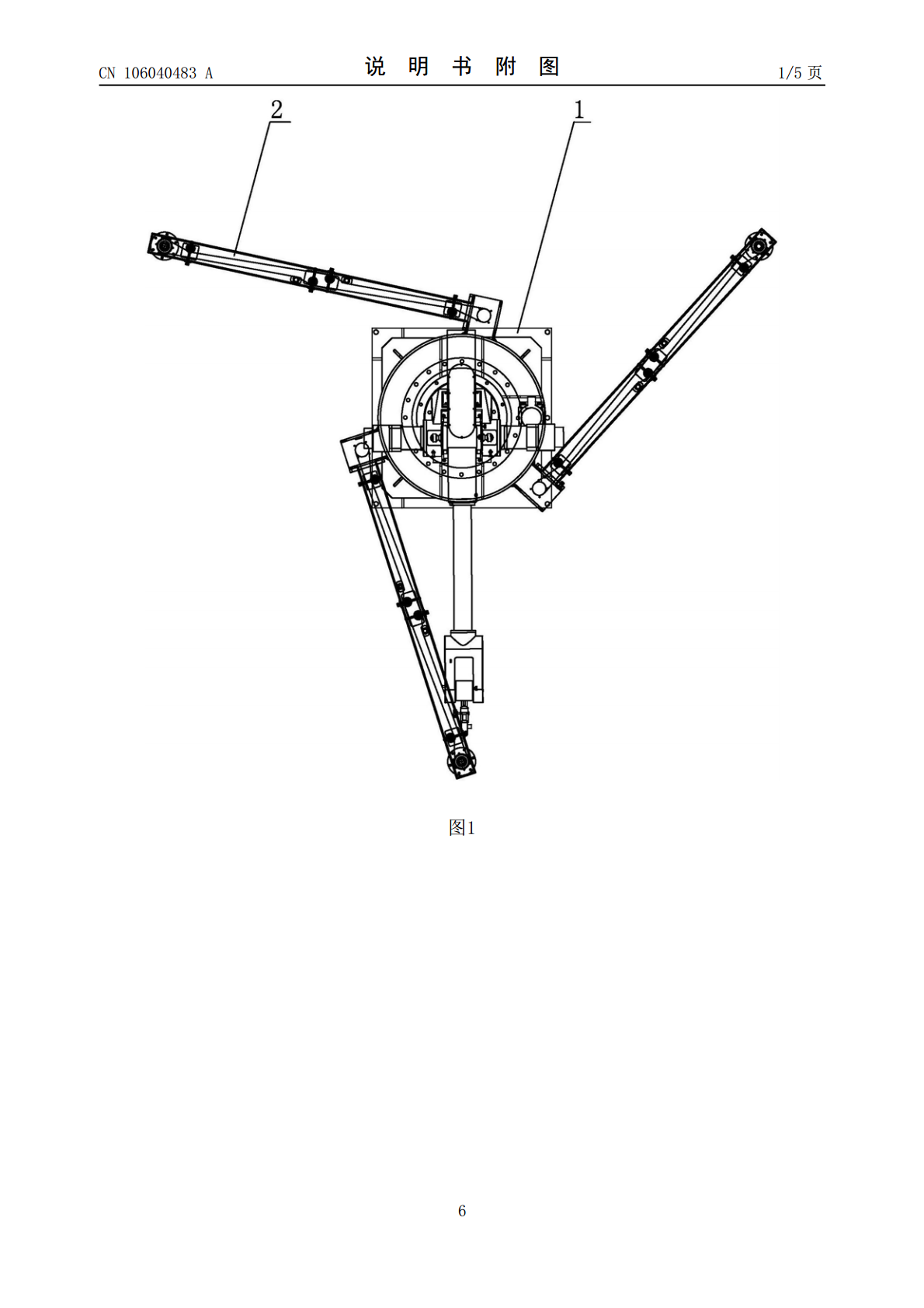
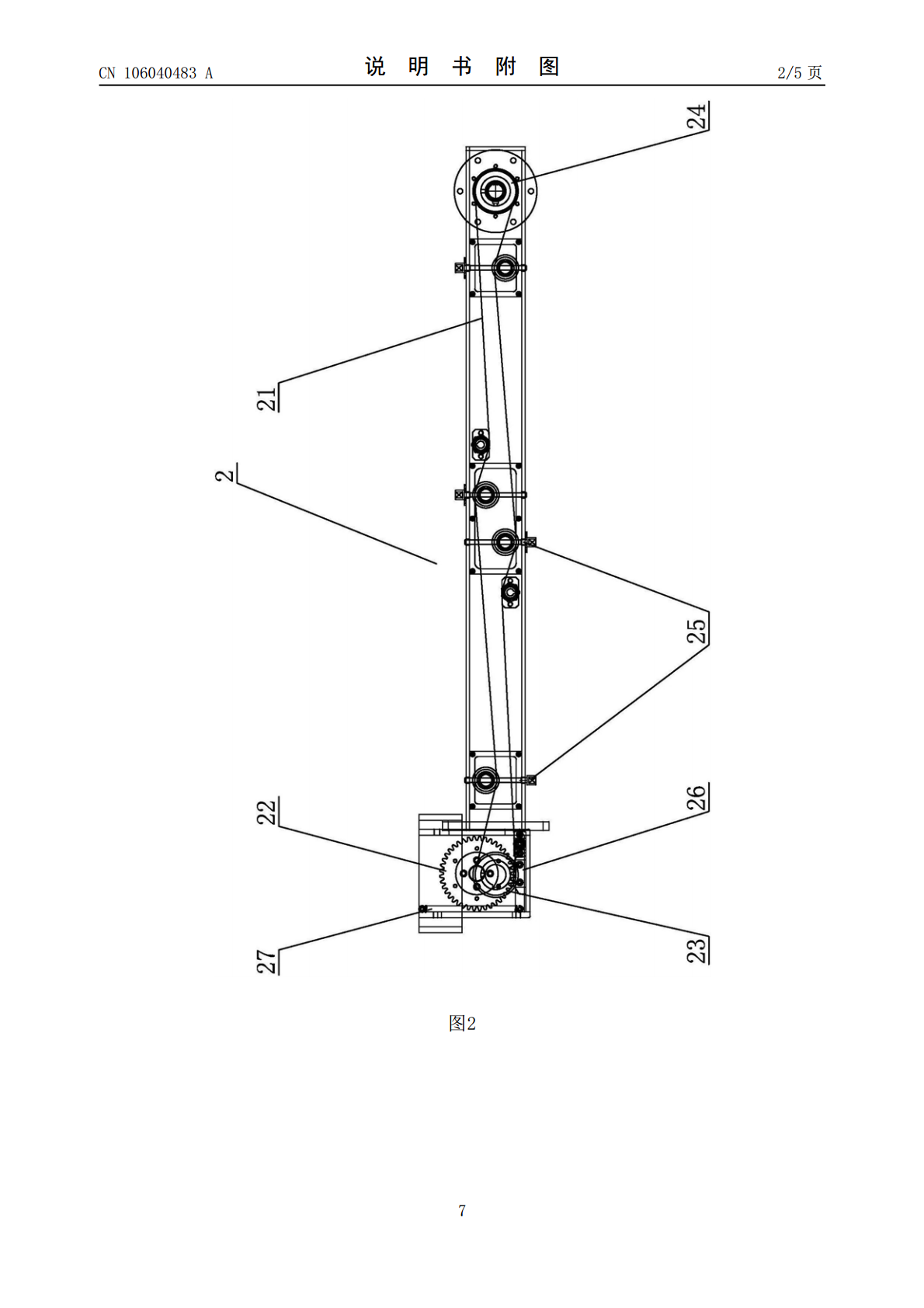
本发明提供了一种多工位机器人喷涂转台,包括基座和若干个工位支撑臂,所述工位支撑臂内设有从动齿轮,所述基座上设有公转机构和公用驱动机构,所述公转机构包括转盘和驱动转盘旋转的第一电机,所述工位支撑臂与转盘固定连接,所述公用驱动机构包括第二电机、公用驱动齿轮、活动安装板和气缸,所述第二电机与活动安装板固定连接,所述第二电机驱动公用驱动齿轮转动,所述气缸驱动活动安装板平移,从而带动公用驱动齿轮与从动齿轮啮合/分离。其还改进了公用驱动机构与工位支撑臂之间的动力传递方式,降低了零部件的使用要求,从而大大降低了多工位转
一种喷涂机器人用多工位转台.pdf
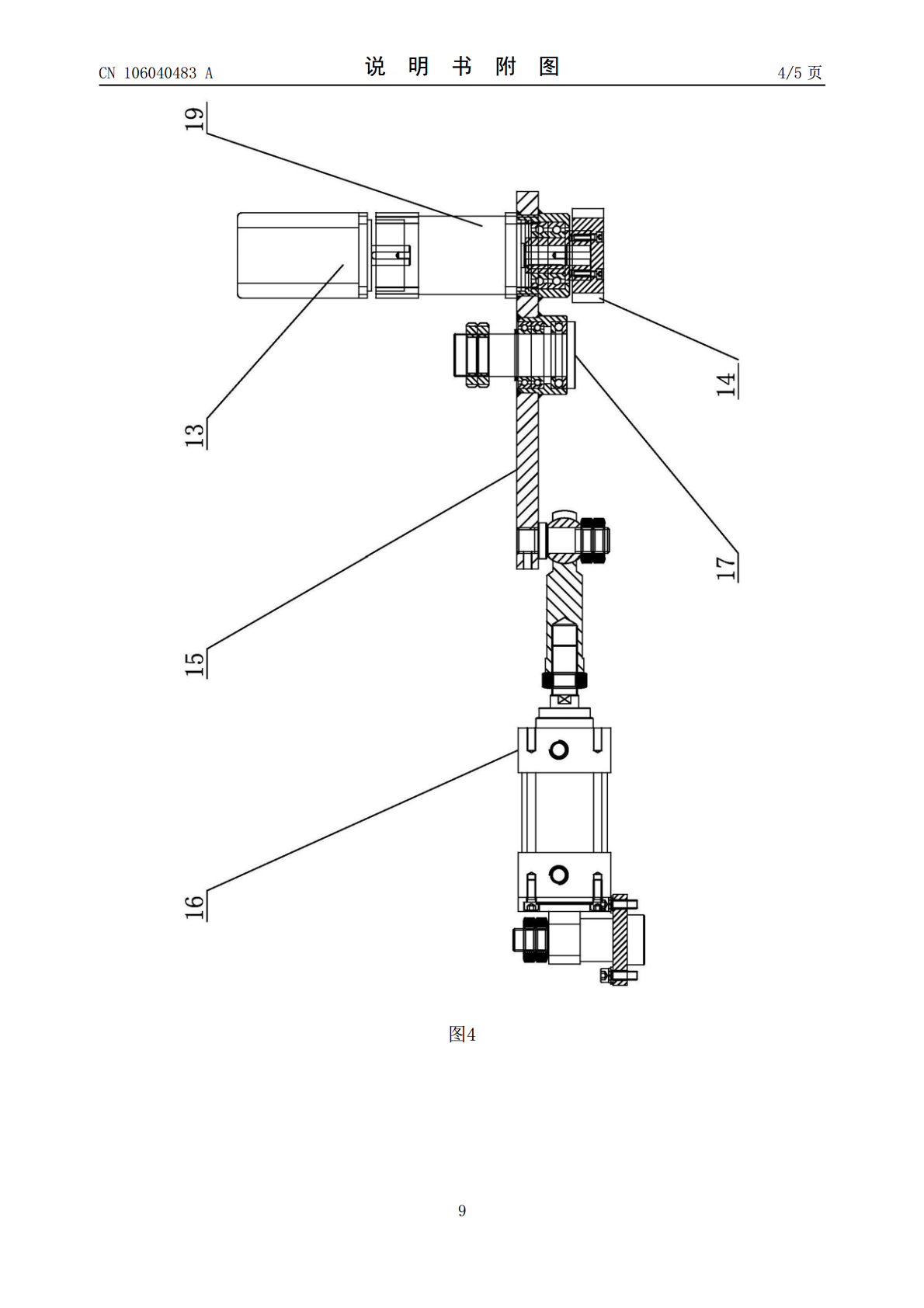
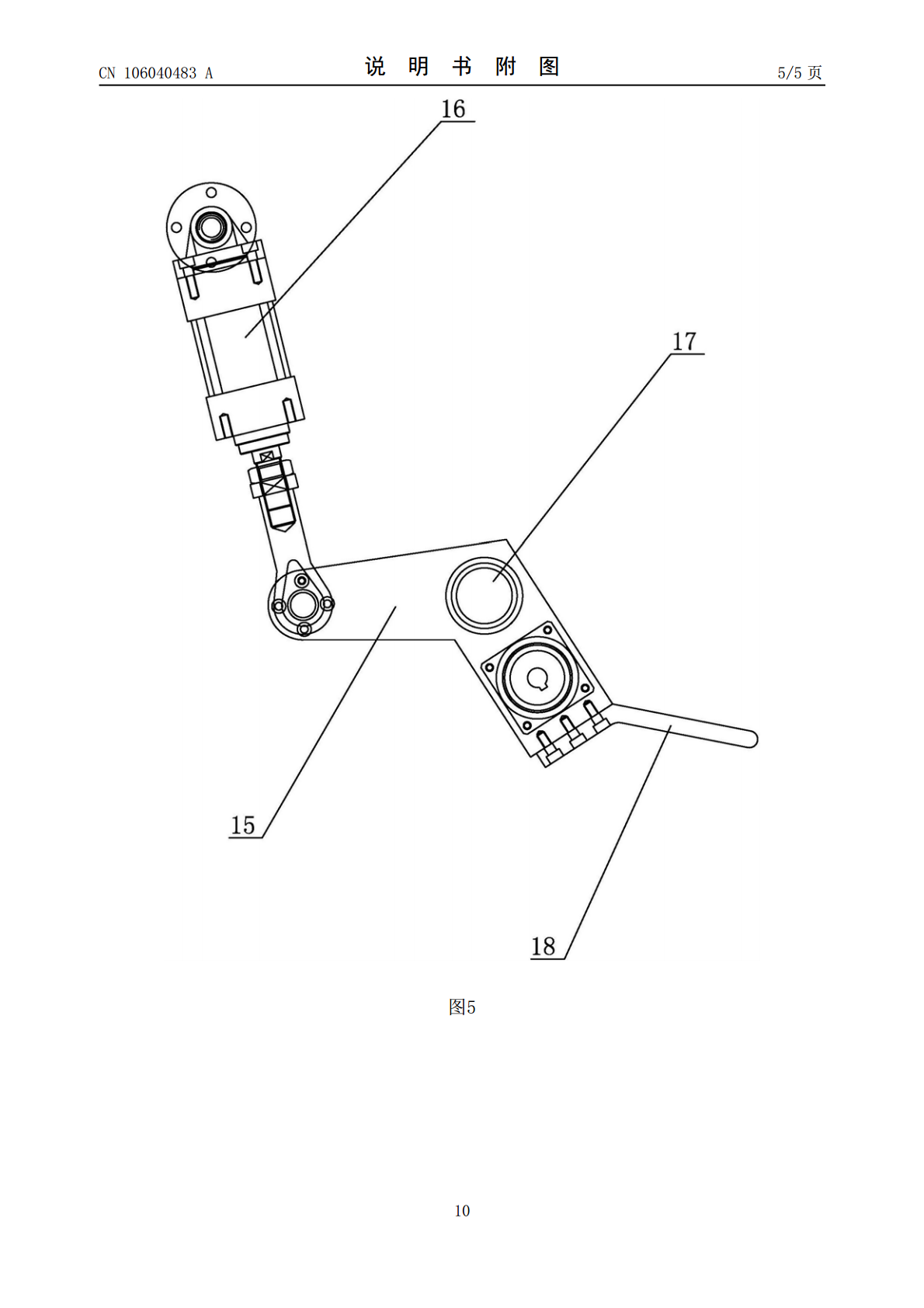
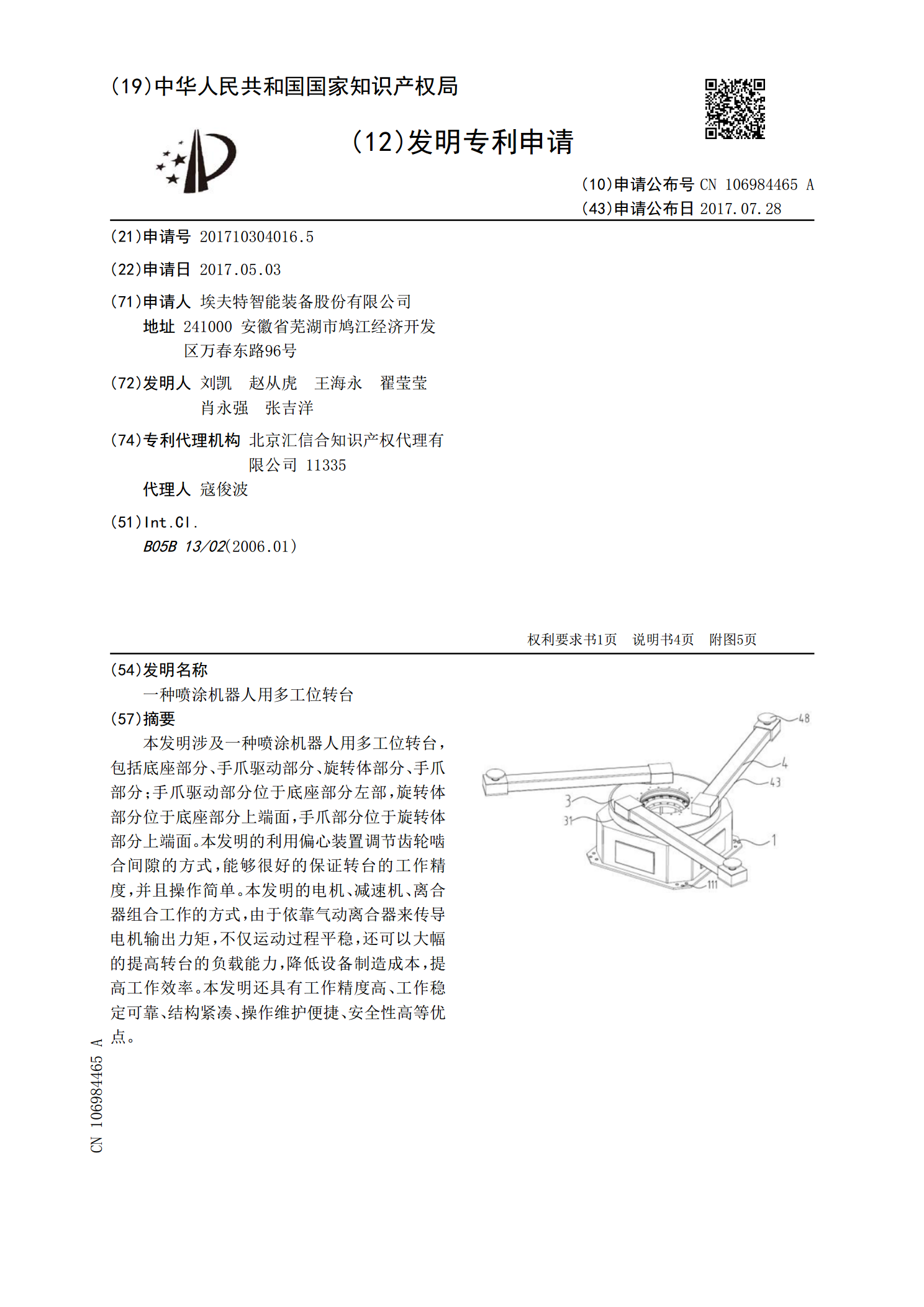
本发明涉及一种喷涂机器人用多工位转台,包括底座部分、手爪驱动部分、旋转体部分、手爪部分;手爪驱动部分位于底座部分左部,旋转体部分位于底座部分上端面,手爪部分位于旋转体部分上端面。本发明的利用偏心装置调节齿轮啮合间隙的方式,能够很好的保证转台的工作精度,并且操作简单。本发明的电机、减速机、离合器组合工作的方式,由于依靠气动离合器来传导电机输出力矩,不仅运动过程平稳,还可以大幅的提高转台的负载能力,降低设备制造成本,提高工作效率。本发明还具有工作精度高、工作稳定可靠、结构紧凑、操作维护便捷、安全性高等优点。
一种多工位转台.pdf
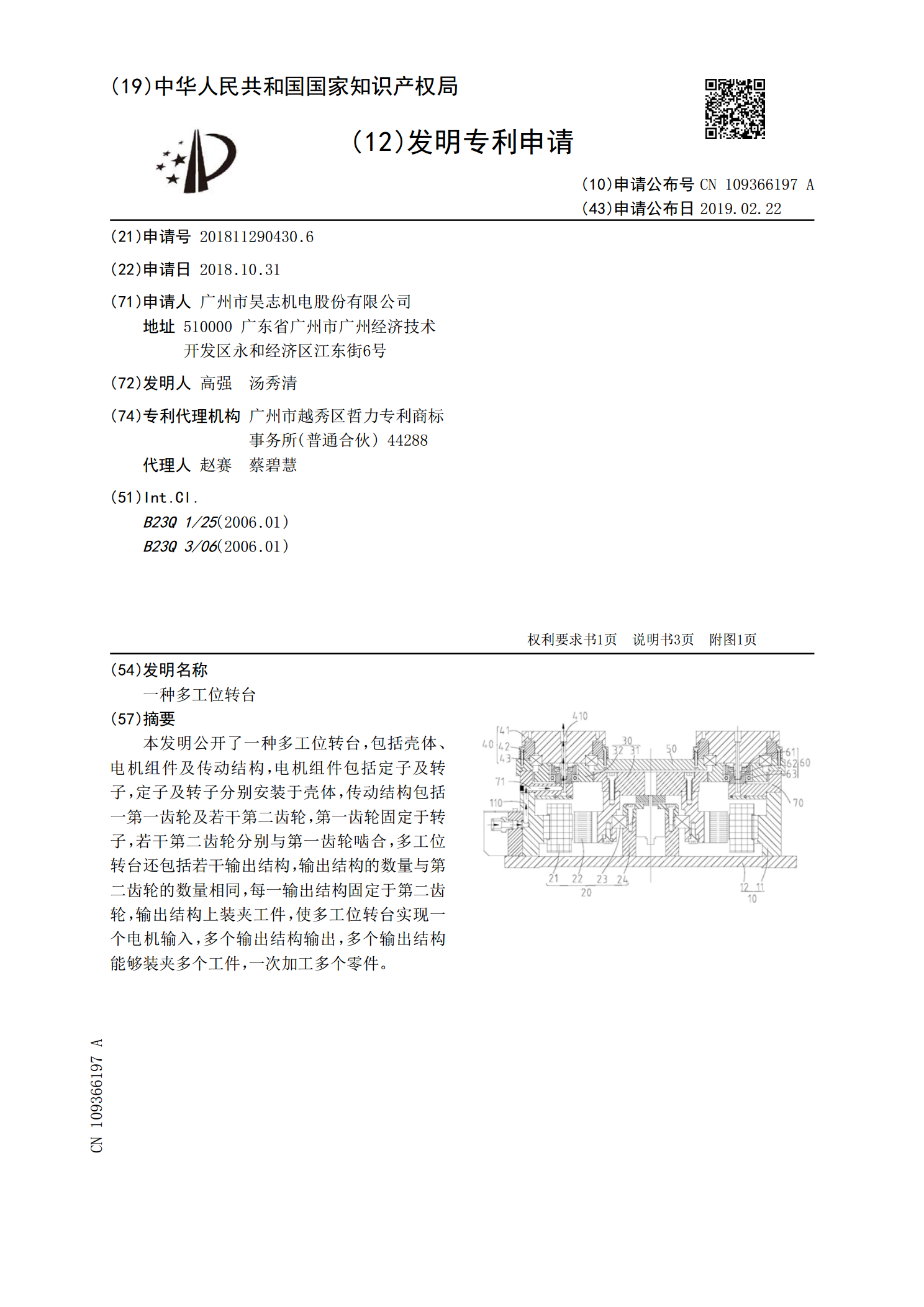
本发明公开了一种多工位转台,包括壳体、电机组件及传动结构,电机组件包括定子及转子,定子及转子分别安装于壳体,传动结构包括一第一齿轮及若干第二齿轮,第一齿轮固定于转子,若干第二齿轮分别与第一齿轮啮合,多工位转台还包括若干输出结构,输出结构的数量与第二齿轮的数量相同,每一输出结构固定于第二齿轮,输出结构上装夹工件,使多工位转台实现一个电机输入,多个输出结构输出,多个输出结构能够装夹多个工件,一次加工多个零件。
门扇多工位喷涂装置.pdf
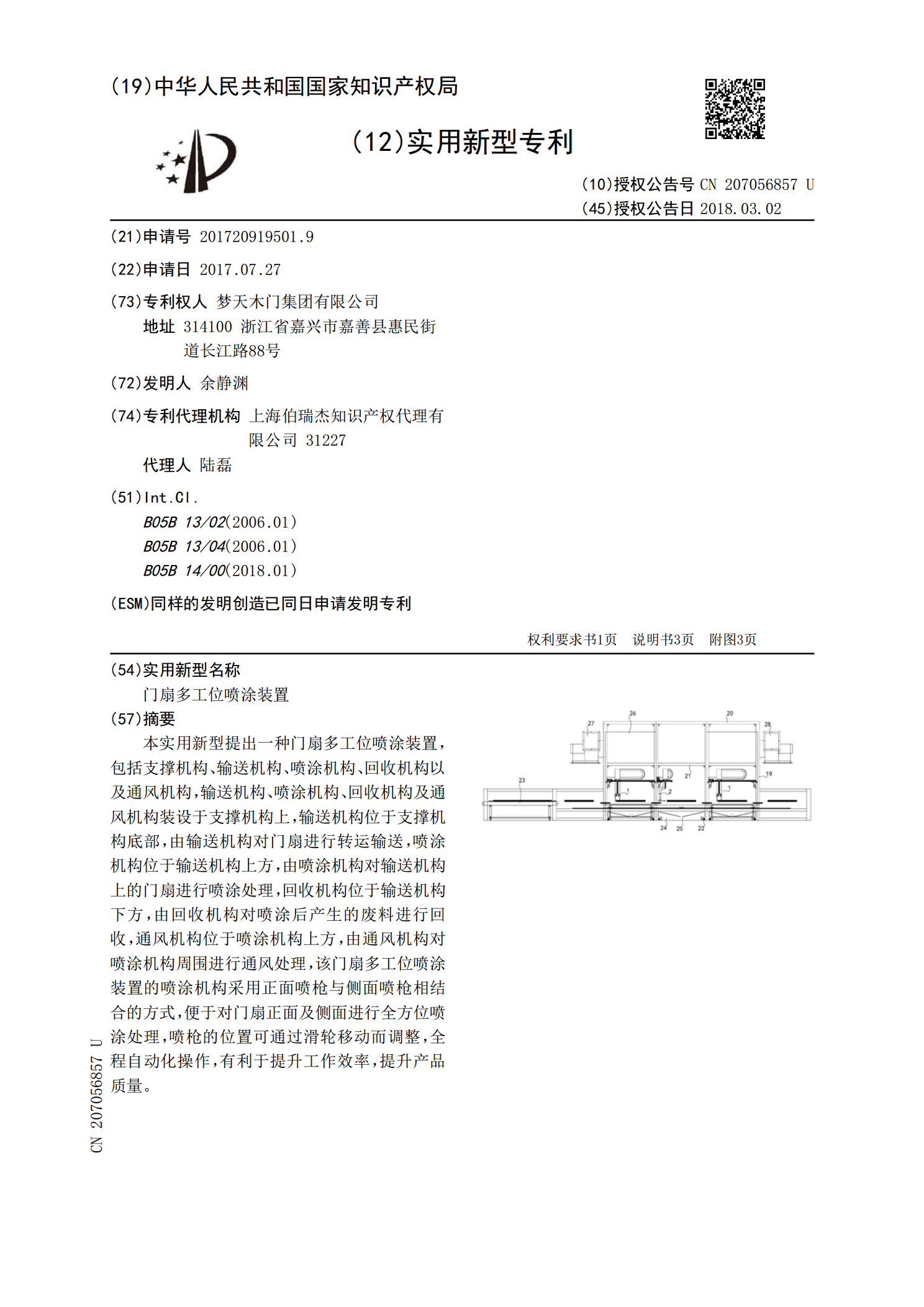
本实用新型提出一种门扇多工位喷涂装置,包括支撑机构、输送机构、喷涂机构、回收机构以及通风机构,输送机构、喷涂机构、回收机构及通风机构装设于支撑机构上,输送机构位于支撑机构底部,由输送机构对门扇进行转运输送,喷涂机构位于输送机构上方,由喷涂机构对输送机构上的门扇进行喷涂处理,回收机构位于输送机构下方,由回收机构对喷涂后产生的废料进行回收,通风机构位于喷涂机构上方,由通风机构对喷涂机构周围进行通风处理,该门扇多工位喷涂装置的喷涂机构采用正面喷枪与侧面喷枪相结合的方式,便于对门扇正面及侧面进行全方位喷涂处理,喷
一种多工位储斗转台.pdf
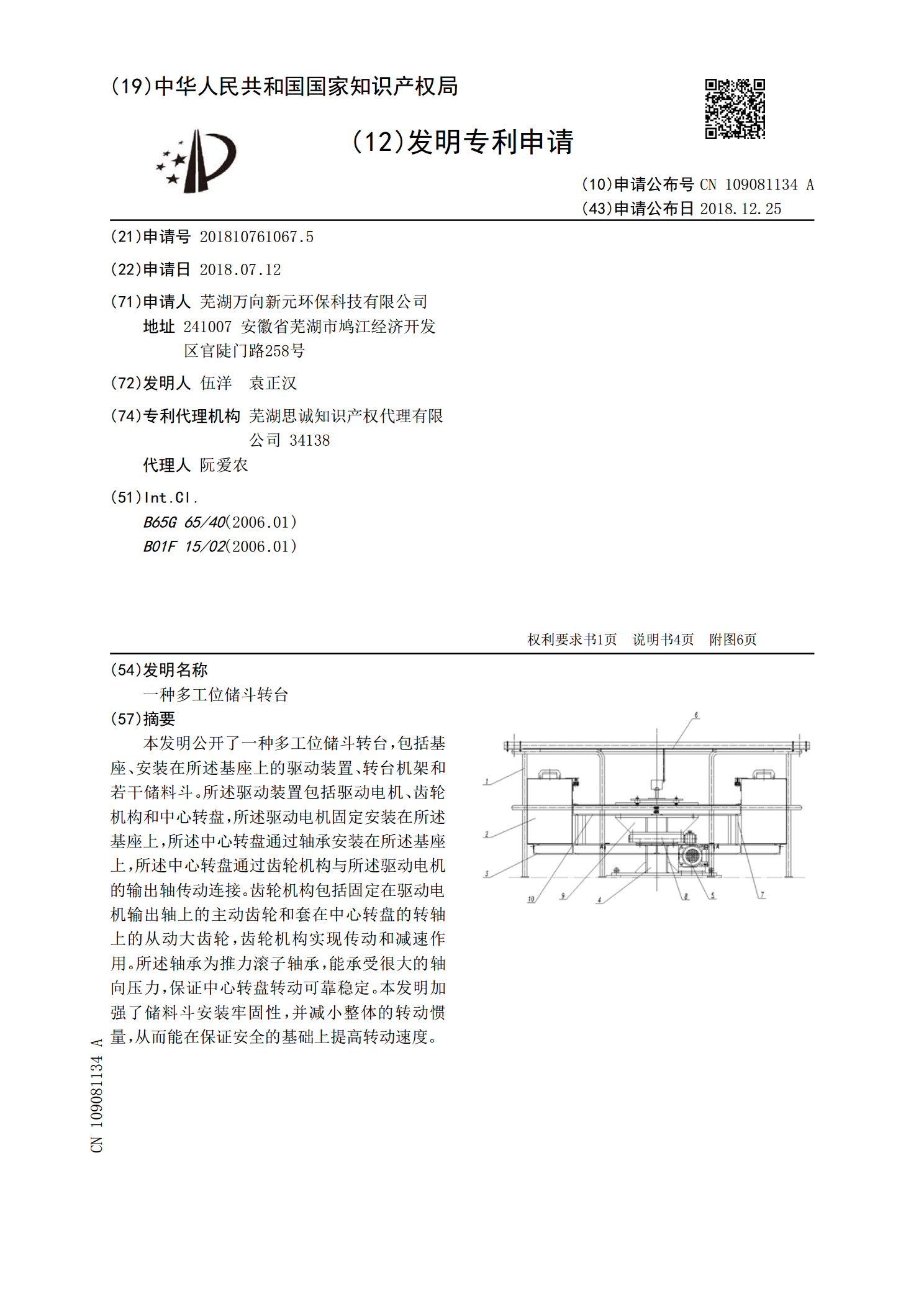
本发明公开了一种多工位储斗转台,包括基座、安装在所述基座上的驱动装置、转台机架和若干储料斗。所述驱动装置包括驱动电机、齿轮机构和中心转盘,所述驱动电机固定安装在所述基座上,所述中心转盘通过轴承安装在所述基座上,所述中心转盘通过齿轮机构与所述驱动电机的输出轴传动连接。齿轮机构包括固定在驱动电机输出轴上的主动齿轮和套在中心转盘的转轴上的从动大齿轮,齿轮机构实现传动和减速作用。所述轴承为推力滚子轴承,能承受很大的轴向压力,保证中心转盘转动可靠稳定。本发明加强了储料斗安装牢固性,并减小整体的转动惯量,从而能在保证