
电磁编队卫星姿态和轨道相对控制方法.pdf

盼易****君a


1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共30页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

电磁编队卫星姿态和轨道相对控制方法.pdf
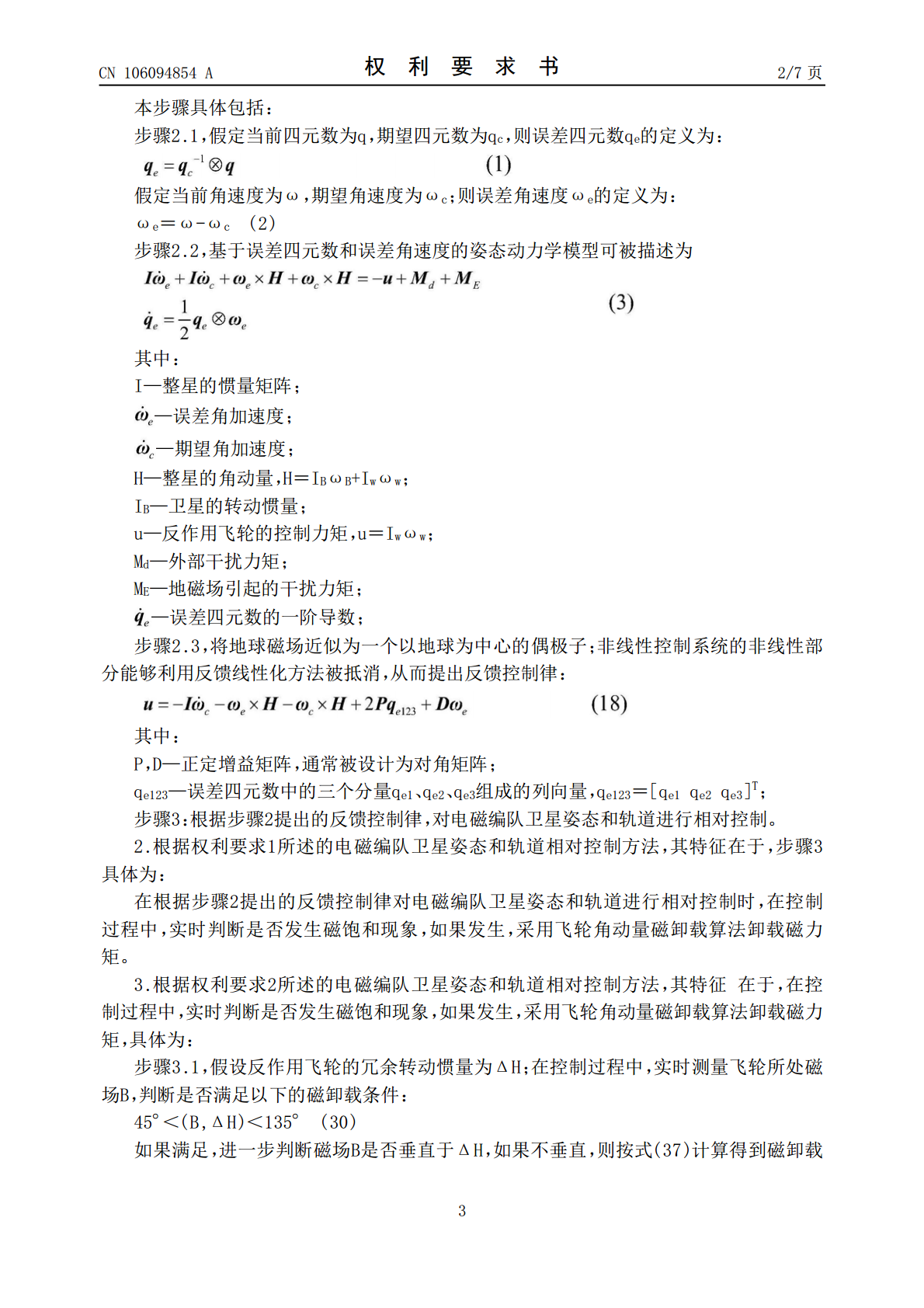
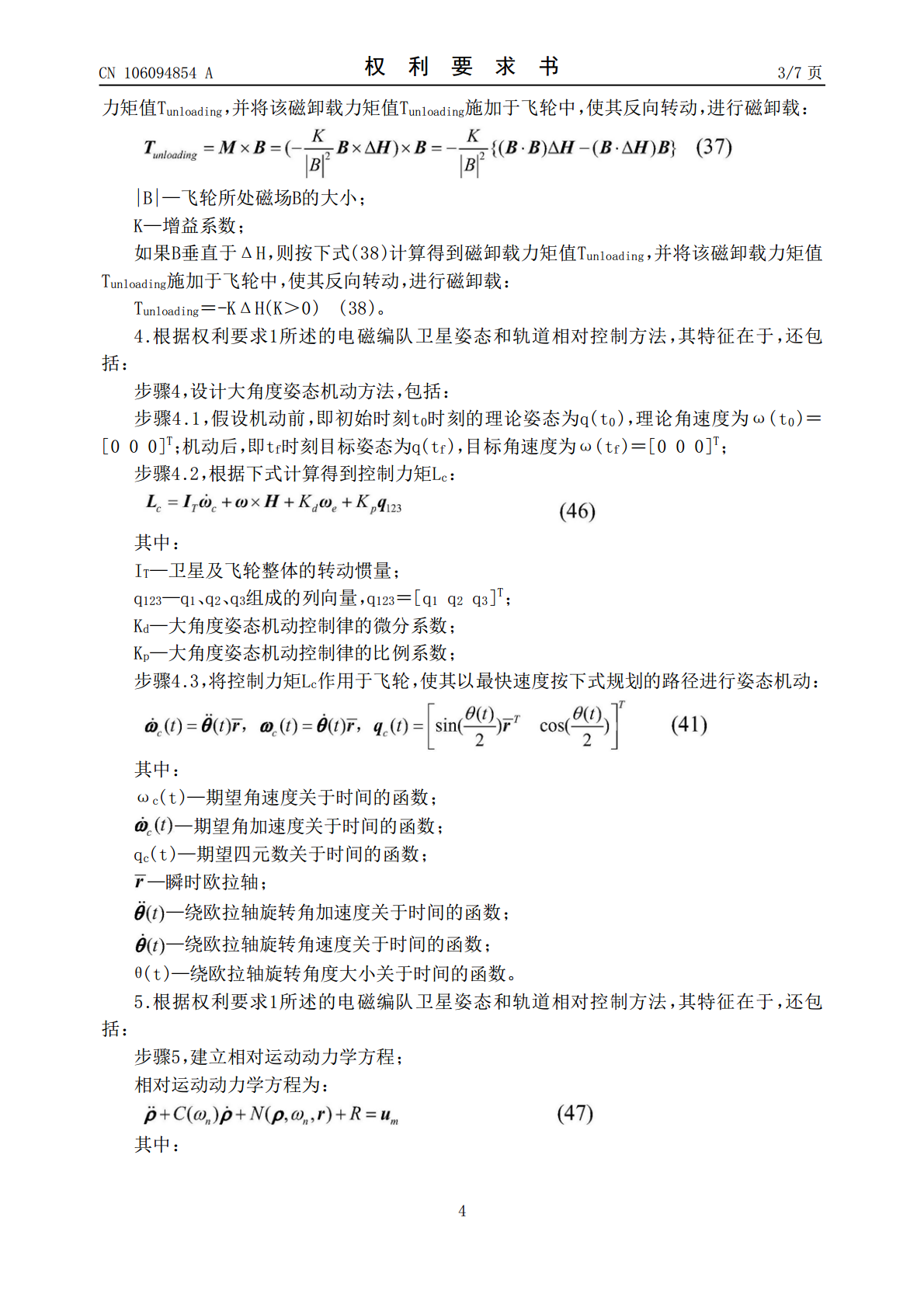
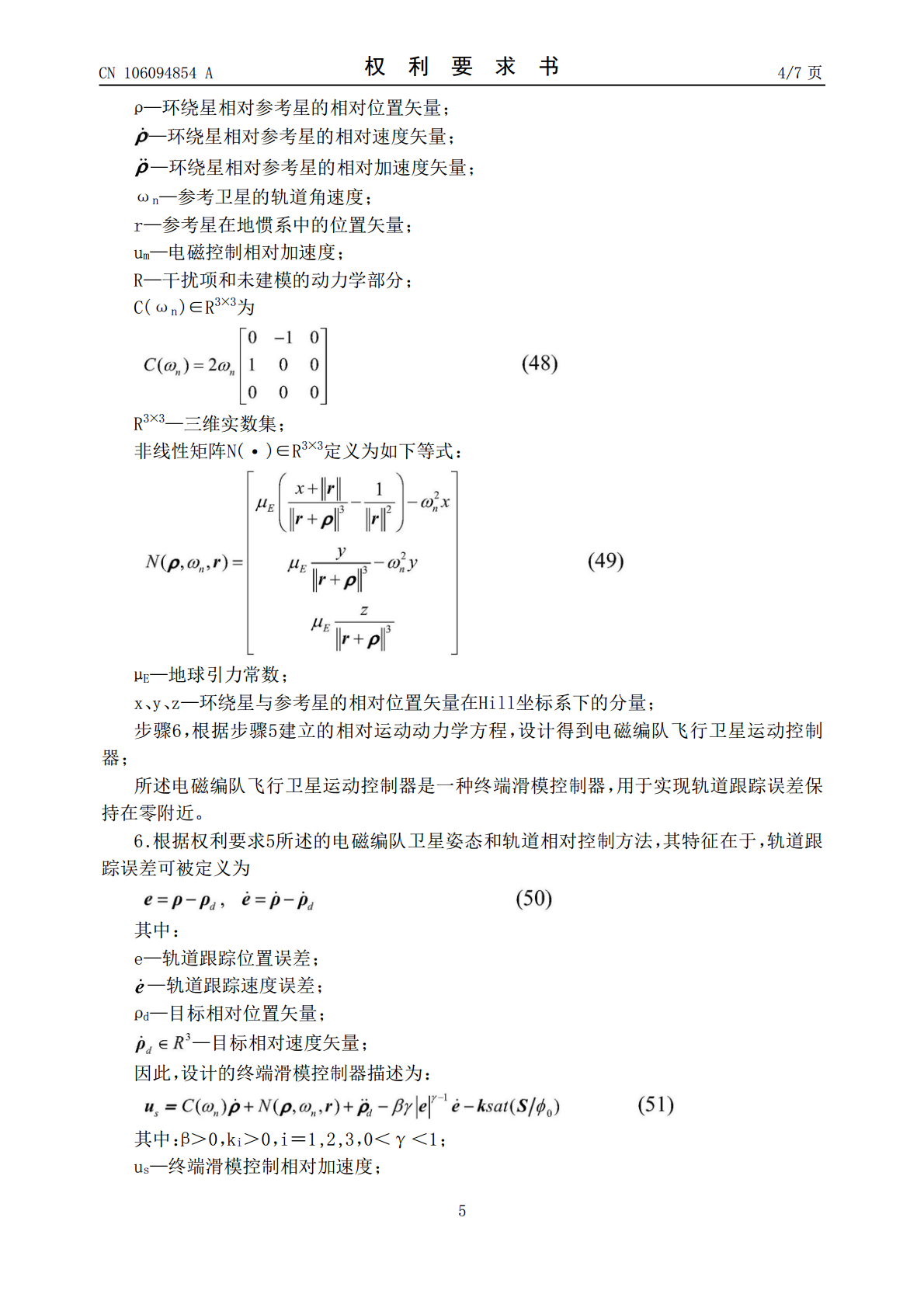
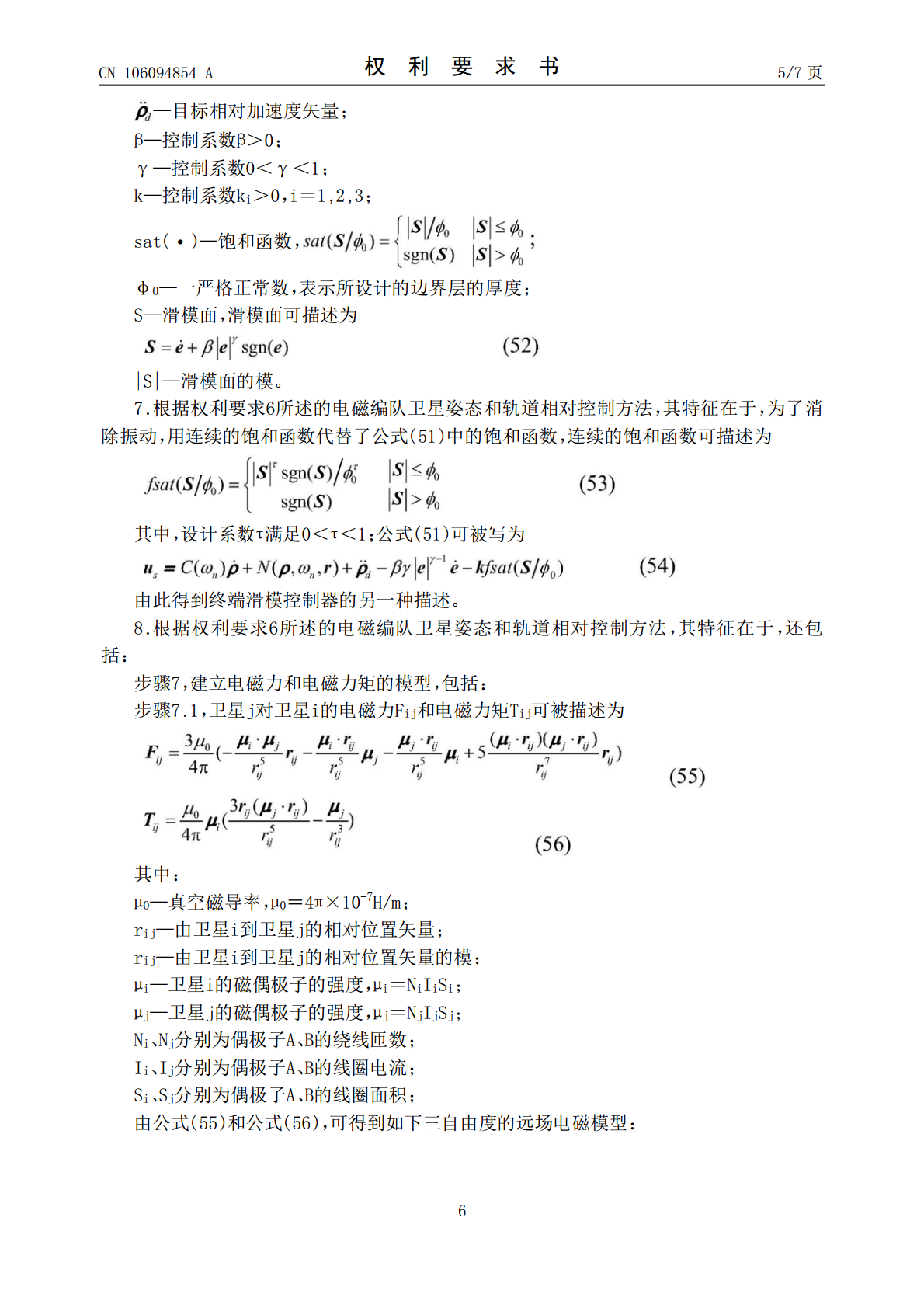
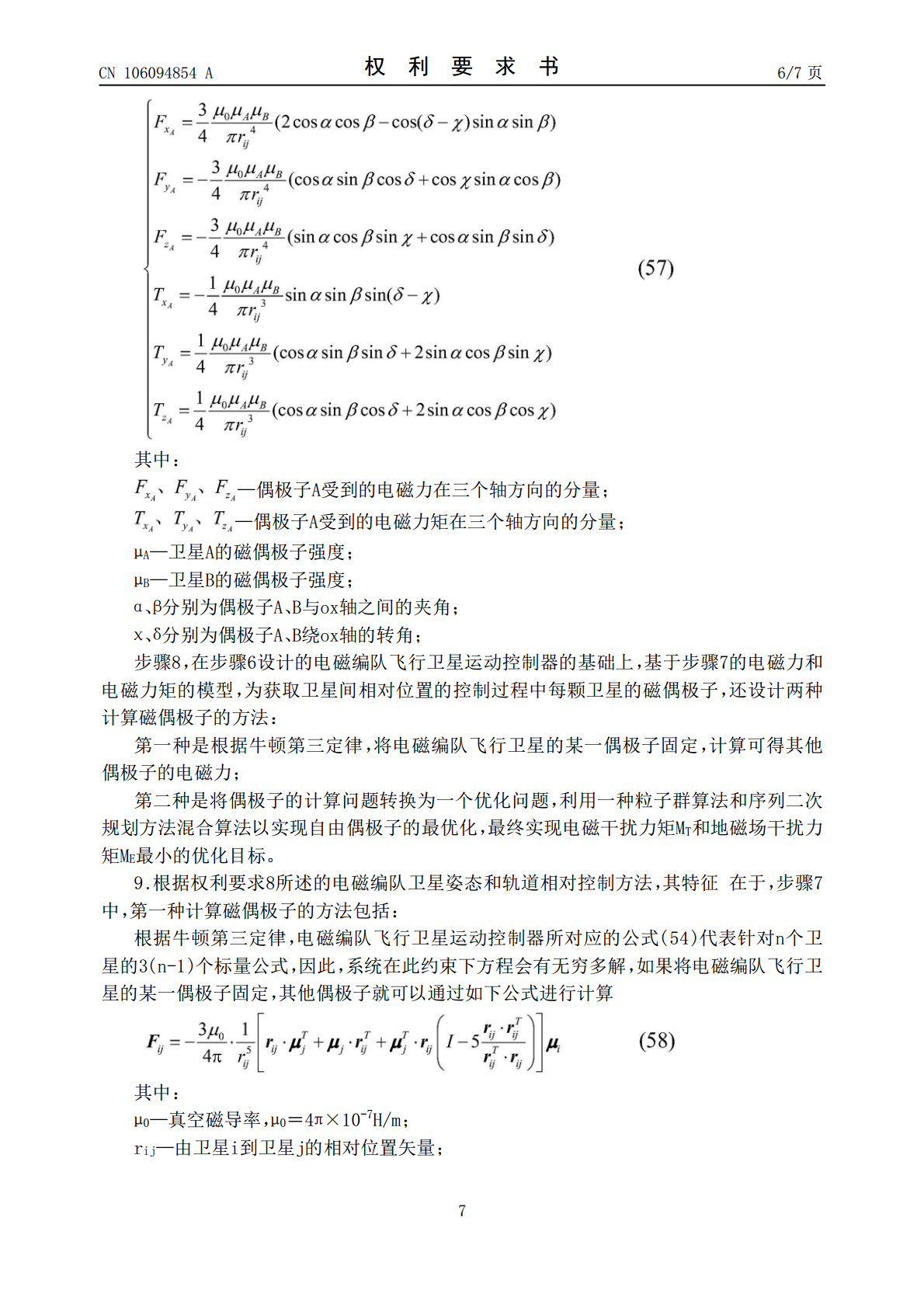
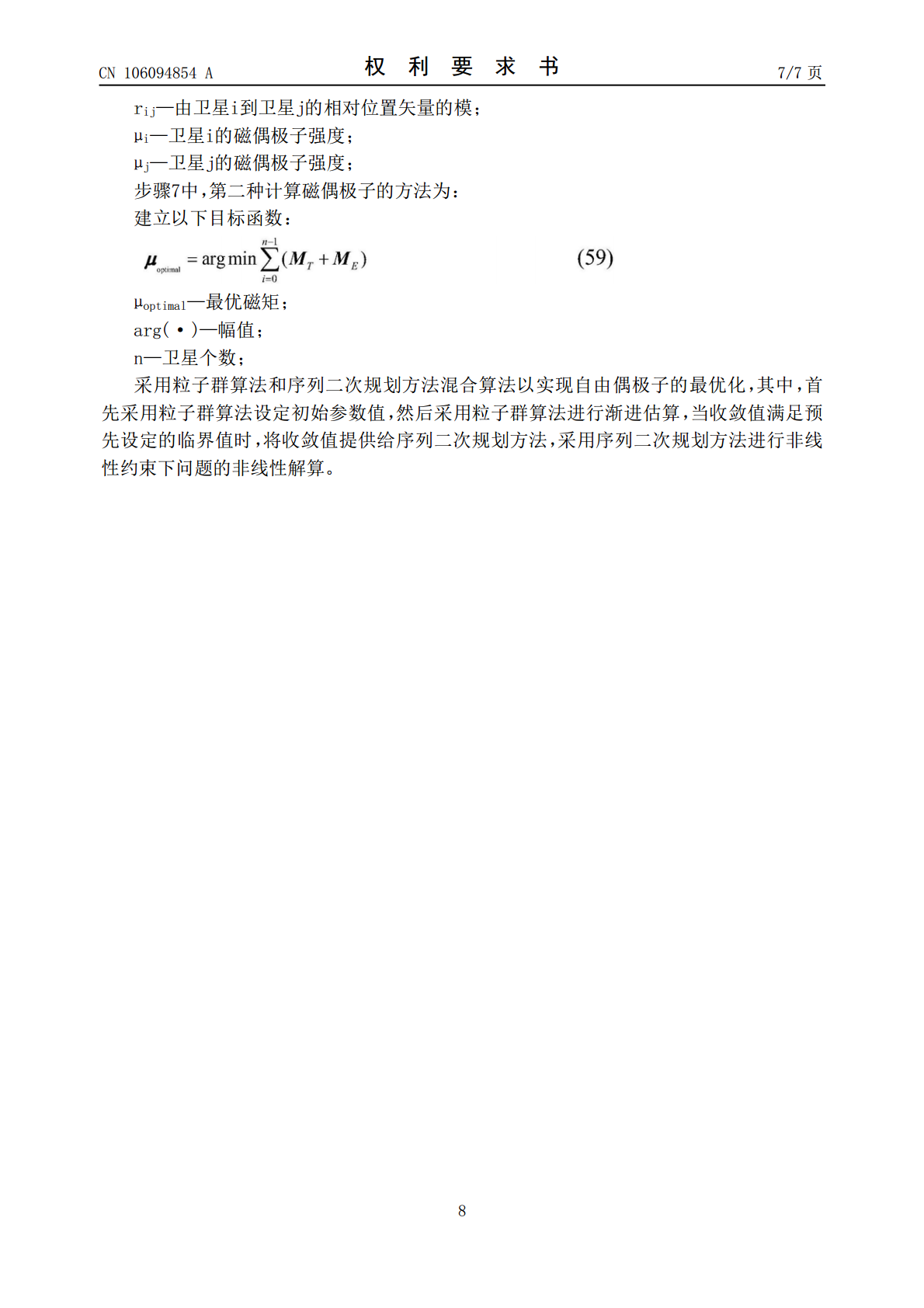
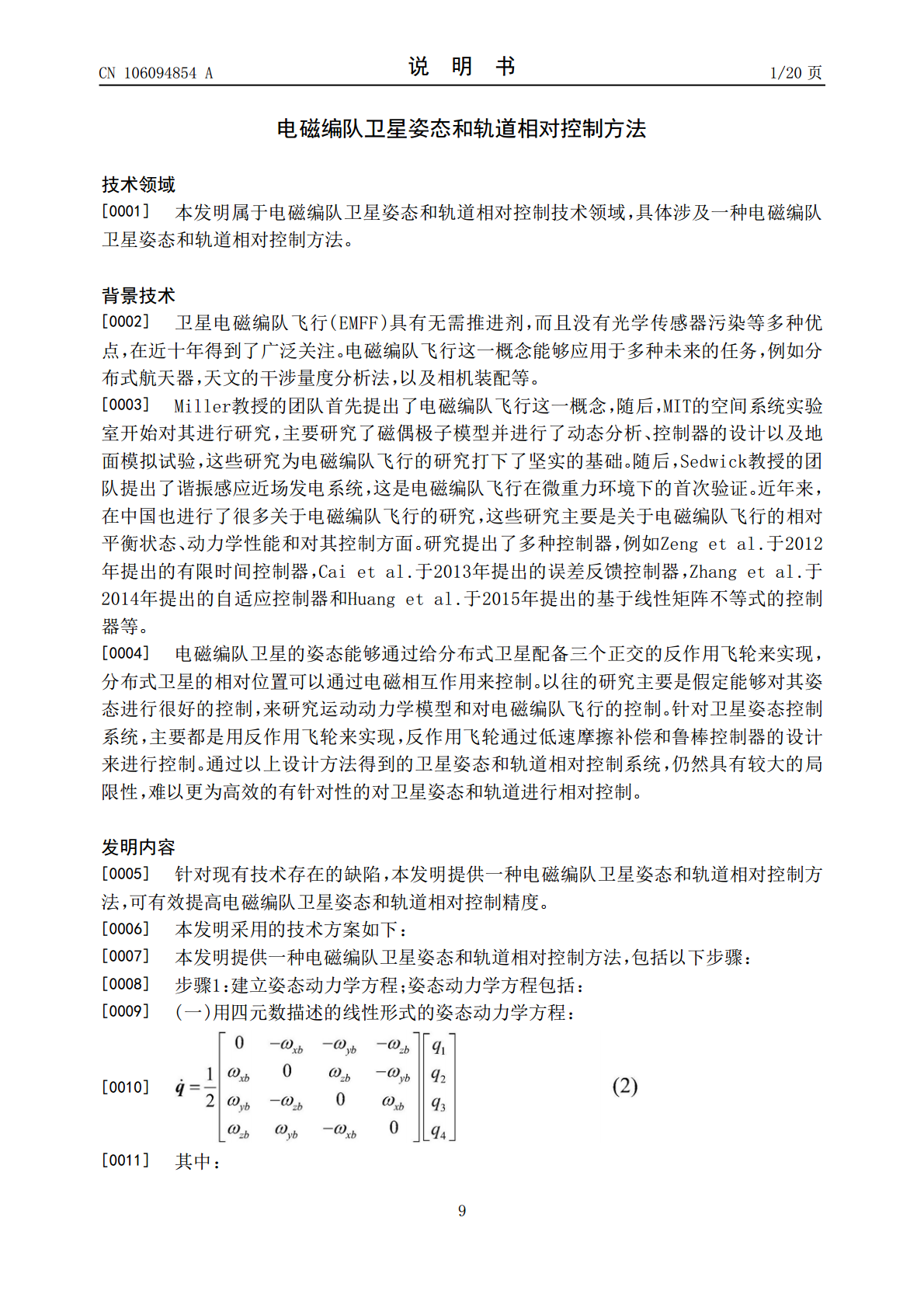
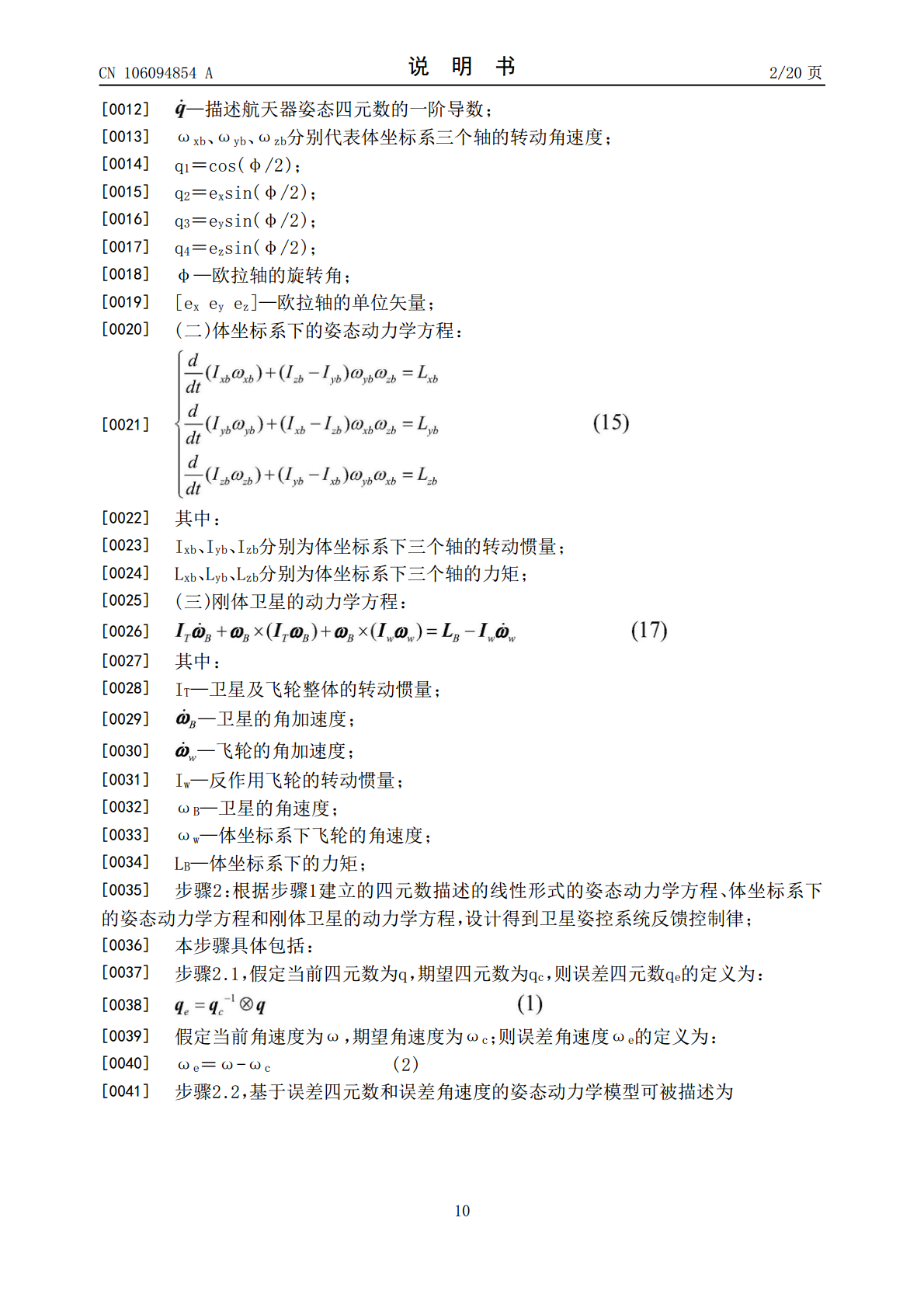
本发明提供一种电磁编队卫星姿态和轨道相对控制方法,步骤1,包括以下步骤:建立姿态动力学方程;根据步骤1建立的四元数描述的线性形式的姿态动力学方程、体坐标系下的姿态动力学方程和刚体卫星的动力学方程,设计得到卫星姿控系统反馈控制律。步骤3:根据步骤2提出的反馈控制律,对电磁编队卫星姿态和轨道进行相对控制。优点为:建立了姿态动力学方程、相对运动动力学方程及电磁力和电磁力矩的模型,由此设计的卫星姿控系统反馈控制律、飞轮角动量磁卸载算法、大角度姿态机动方法、电磁编队飞行卫星运动控制器和磁偶极子的控制分配方法具有较好

一种编队控制模式下的卫星姿态控制方法.pdf
一种编队控制模式下的卫星姿态控制方法,在由编队推力器干扰力矩引起的星体三轴角动量的积累值小于等于飞轮可吸收的角动量值时,采用反作用飞轮实现卫星姿态控制,通过反作用飞轮PID控制对编队推力器干扰力矩进行补偿,在由编队推力器干扰力矩引起的星体三轴角动量的积累值大于飞轮可吸收的角动量值时,采用推力器实现卫星姿态控制,通过推力器PD控制对编队推力器干扰力矩进行补偿。本发明实现了满足编队飞行的姿态控制精度和卫星快速姿态稳定控制要求,提高了卫星在轨编队飞行工作寿命和在轨可靠性,减少了卫星编队飞行姿态控制对地面测控资源

SGP4轨道预报软件在卫星编队相对姿态预报方面的应用研究的开题报告.docx
SGP4轨道预报软件在卫星编队相对姿态预报方面的应用研究的开题报告一、研究背景随着航天技术的不断发展,卫星编队技术已经成为一种重要的空间应用技术,在卫星通信、遥感、导航等领域有着广泛的应用。在卫星编队技术中,相对姿态的预报对卫星编队控制和运行具有重要意义。SGP4是一种常用的卫星轨道预报软件,可以对地球轨道上的卫星轨道进行较为精确的预报。然而,在卫星编队系统中,SGP4轨道预报软件的应用仅限于单个卫星的轨道预报,而对于相对姿态的预报方面仍存在一定问题。因此,本研究将重点研究SGP4轨道预报软件在卫星编队相
编队卫星姿态协同控制仿真装置及其仿真验证方法.pdf
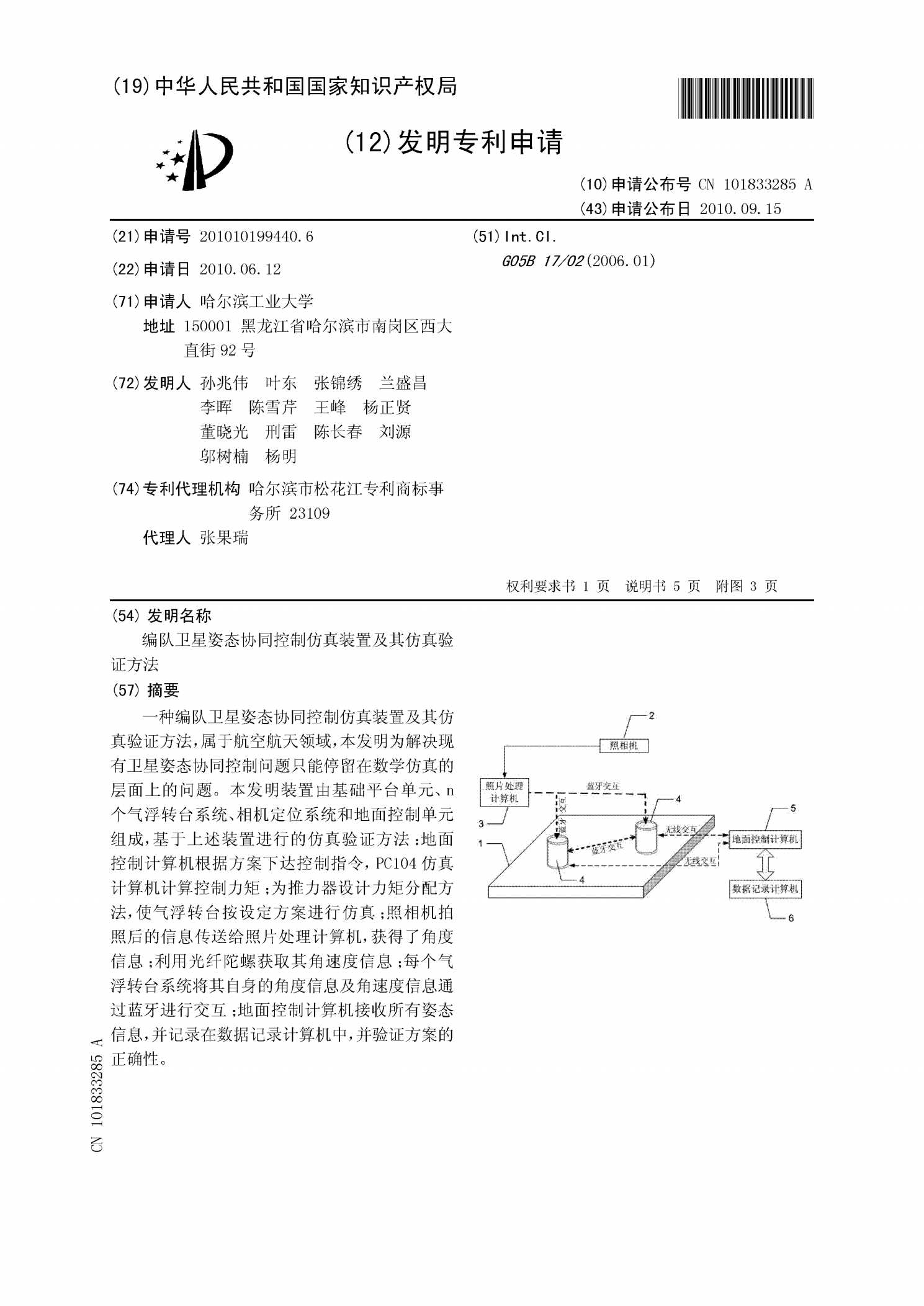
一种编队卫星姿态协同控制仿真装置及其仿真验证方法,属于航空航天领域,本发明为解决现有卫星姿态协同控制问题只能停留在数学仿真的层面上的问题。本发明装置由基础平台单元、n个气浮转台系统、相机定位系统和地面控制单元组成,基于上述装置进行的仿真验证方法:地面控制计算机根据方案下达控制指令,PC104仿真计算机计算控制力矩;为推力器设计力矩分配方法,使气浮转台按设定方案进行仿真;照相机拍照后的信息传送给照片处理计算机,获得了角度信息;利用光纤陀螺获取其角速度信息;每个气浮转台系统将其自身的角度信息及角速度信息通过蓝

卫星编队飞行相对轨迹优化与控制.docx
卫星编队飞行相对轨迹优化与控制卫星编队飞行相对轨迹优化与控制摘要:随着卫星任务的不断发展和多样化,卫星编队飞行相对轨迹优化与控制成为卫星系统设计的重要研究方向之一。本论文主要针对卫星编队飞行相对轨迹的优化问题进行研究,介绍了卫星编队飞行的概念和应用场景,分析了卫星编队飞行相对轨迹优化的关键问题,提出了一种基于优化算法和控制方法的解决方案,并通过仿真来验证所提出方法的有效性。关键词:卫星编队飞行,相对轨迹优化,优化算法,控制方法,仿真1.引言卫星编队飞行是指多个卫星通过相对轨道间的协调和控制,在空间中形成一