
一种用于数控系统基于误差测定的伺服参数自整定方法.pdf

萌运****魔王


1/7

2/7

3/7

4/7
5/7
6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种用于数控系统基于误差测定的伺服参数自整定方法.pdf
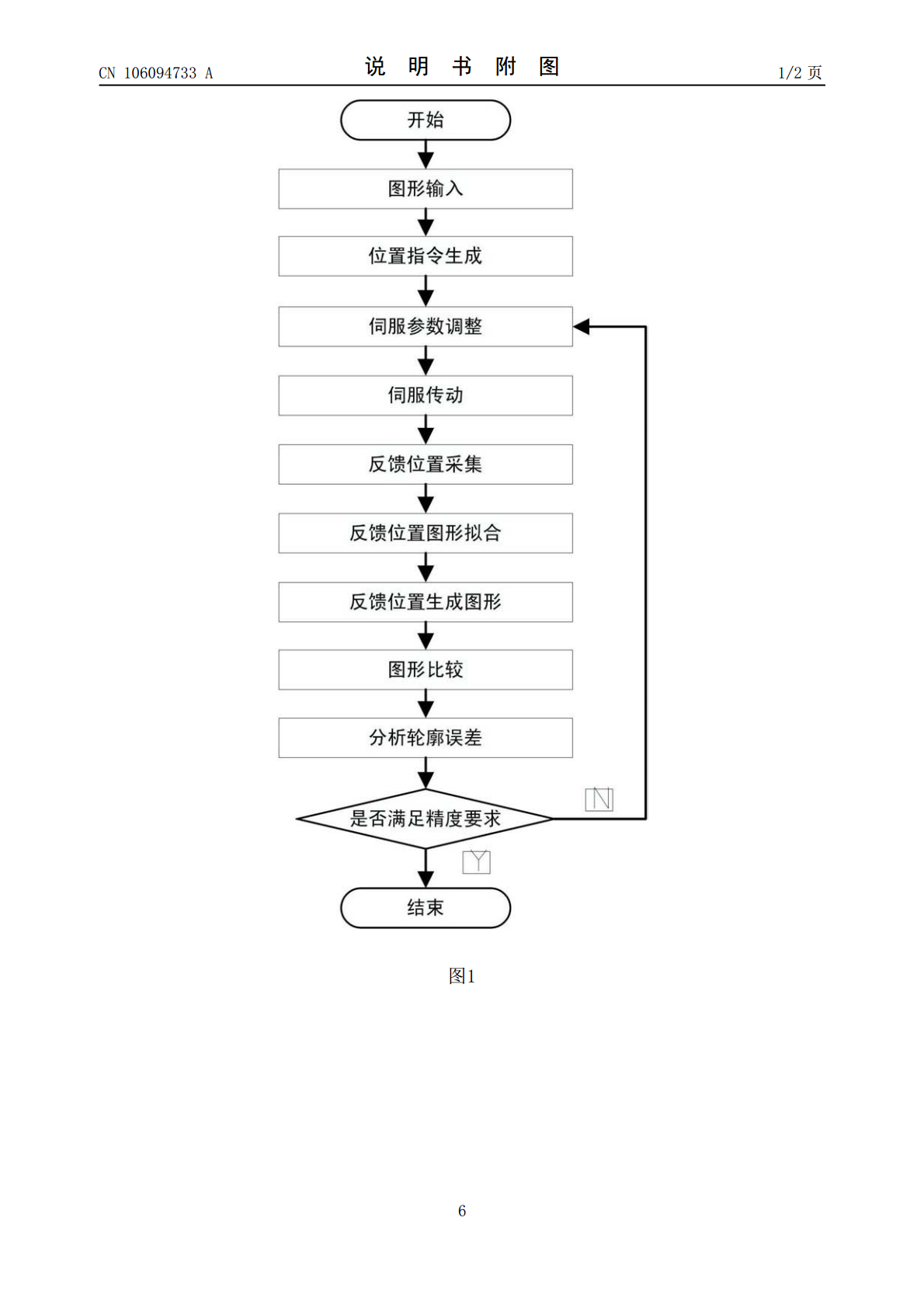
本发明涉及激光切割数控领域,具体的说是一种用于数控系统基于误差测定的伺服参数自整定方法。包括如下步骤:(1)图形输入;(2)位置指令序列生成;(3)伺服参数调整;(4)伺服传动;(5)反馈位置采集;(6)反馈位置图形拟合;(7)反馈位置生成图形;(8)图形比较;(9)分析误差:数控系统分析拟合曲线组成的图形和输入图形之间的轮廓误差,确定轮廓误差的位置和轮廓误差的大小,如轮廓误差大小符合预先设定的误差参数,则结束操作;反之,则返回第三步重新整定伺服参数,直至轮廓误差大小符合设定的误差参数。本发明同现有技术相

基于参数辨识的交流伺服速度环参数自整定.docx
基于参数辨识的交流伺服速度环参数自整定随着科学技术的进步,交流电动机的控制理论日臻成熟,尤其是微电子、计算机和电力电子技术的发展使矢量控制及一些复杂的控制算法在工程应用上得以实现,使交流伺服系统在数控机床、机器人等领域得到广泛的应用。交流伺服驱动器作为伺服系统的控制核心,大多都采用矢量控制加PID控制的控制结构。通常形成电流环、速度环和位置环的三环控制。交流伺服驱动的三环控制一般部使用PID控制,电流环与速度环使用PI控制,位置环使用P控制。其中电流环控制能够抑制电源波动的干扰,提高系统响应速度;速度环控

PMSM伺服系统参数自整定研究.docx
PMSM伺服系统参数自整定研究摘要:本文研究PMSM伺服系统参数自整定方法,介绍了PMSM伺服系统的基本结构和工作原理,分析了影响伺服系统性能的因素,并提出了一种结合PID控制和模糊控制的参数自整定方法。通过仿真验证,该方法能够较快地收敛至最优参数,并提高系统的响应速度和稳定性。关键词:PMSM伺服系统;参数自整定;PID控制;模糊控制;响应速度;稳定性一、引言永磁同步电机(PMSM)作为一种高效、高功率密度的驱动器,广泛应用于机器人、电动车、空调等领域。而伺服系统是PMSM的一个重要应用之一,其可以实现

一种基于规则的PID参数自整定.docx
一种基于规则的PID参数自整定标题:一种基于规则的PID参数自整定方法摘要:PID(比例积分微分)控制器是一种广泛应用于工业控制系统中的反馈控制器。在实际应用中,如何设置合适的PID参数一直是一个重要的问题。本论文提出一种基于规则的PID参数自整定方法,通过根据系统的特性和规则设定合理的参数范围,并利用规则和经验知识进行调整,以实现PID参数的自整定。1.引言PID控制器是一种经典的反馈控制器,广泛应用于工业、环境等各个领域。PID控制器通过测量被控对象的实际输出与期望输出之间的误差,实时调整输出信号,使

一种基于闭环响应的加权PID参数自整定方法.docx
一种基于闭环响应的加权PID参数自整定方法基于闭环响应的加权PID参数自整定方法摘要:PID控制器是广泛应用于工业控制系统中的一种经典控制算法。然而,PID参数的选择对于控制系统的性能至关重要。在复杂的工业环境中,传统的手动整定PID参数的方法往往耗时耗力,且无法保证最优性能。因此,提出了一种基于闭环响应的加权PID参数自整定方法。该方法利用系统的闭环响应来自动调整PID参数,通过加权方法对不同频率的闭环响应进行整合,从而得到最佳的PID参数。通过对一个二阶过程进行仿真实验,验证了该方法的有效性。关键词: