
渔网编织机.pdf

书生****ma


1/5

2/5

3/5
4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

渔网编织机.pdf
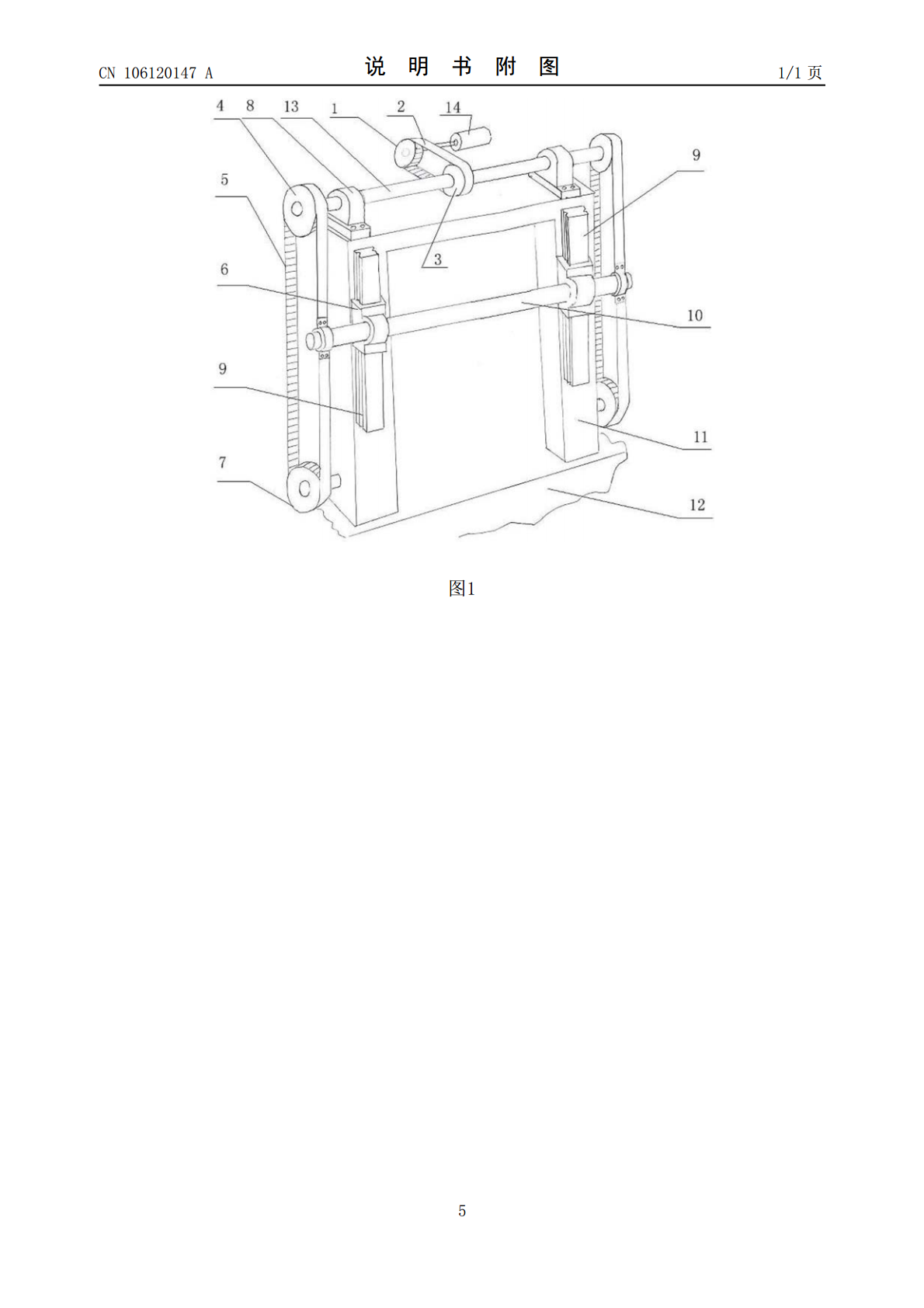
本发明涉及一种渔网编织机,包括包含有打结棒的打结机构,其特征在于:所述打结机构还包括安装架、安装于安装架上的两个相平行的直线滑轨、分别安装于两直线滑轨上的两滑块,所述打结棒两侧分别与两滑块固定连接,它还包括电机、两个由主动轮、同步带、从动轮组成的同步带传动系统,所述电机驱动两个主动轮同步旋转,所述打结棒两侧各与一个同步带传动系统中的同步带固定连接。本发明省去了打击臂及其相应的凸轮驱动机构,因而无打击臂对打结棒进行击打这一动作,噪音低;由于打结棒的往复动作系通过电机驱动同步带往复运动完成,毋需依赖于凸轮驱动

一种渔网编织机.pdf
本发明主要公开了一种渔网编织机,包括打纬动力驱动装置、主机弯轴、传动组件、齿轮箱、打刀装置、钢丝绳、综框;打纬动力驱动装置提供引导纬梭打纬动力,主机弯轴的动力经传动组件传递至安装在齿轮箱中的打刀装置中,打刀装置通过钢丝绳连接综框。本发明实现经纬线编织的高度配合,编织的渔网产品经线和纬线密度均匀,提高编织工作效率。

一种渔网自动编织机.pdf
本发明公开了一种渔网自动编织机,包括编织架、控制器、水槽和电动卷辊,所述编织架底部安装有所述控制器,所述编织架上面设置有弧形导线板,所述弧形导线板上安装有导线轮,所述导线板一侧设置有编织器,所述编织器上方设置有所述导线轮,所述编织器下方设置有转向辊,所述水槽设置在所述编织架一侧,且所述水槽的两侧边及所述水槽内部均设置有导向辊,所述水槽的侧壁靠近上边缘处安装有液位检测器,所述水槽内壁两侧均安装有超声波发生器,所述电动卷辊设置在所述水槽一侧。有益效果在于:可对编织后的渔网进行油浸处理,大大提高渔网的韧性,同时

一种剑杆渔网编织机.pdf
本发明涉及纺织机械技术领域,尤其涉及一种剑杆渔网编织机,包括机架、前综框、后综框、驱动部一和驱动部二,前综框上设有固定块一,固定块一上开设有长圆孔,长圆孔内设有滑动杆,滑动杆上固定有连接板一,后综框上设有连接板二,所述连接板一和连接板二上连有固定在机架上的上下运动导向机构;所述前综框的一端固定有滑槽座,所述滑槽座内设有滚轮一,滚轮一上连有滚轮座;滚轮座上连有左右移动传动杆,驱动部一带动前综框进行左右运动,驱动部二带动前、后综框进行上下运动;优势在于:与现有技术相比,该剑杆渔网编织机的综框结构较为简洁、实用

一种渔网编织机的运动机构.pdf
本发明提供一种渔网编织机的运动机构,该机构涉及纺织机械技术领域。渔网编织机的运动机构包括箱体、主动轴、从动轴a、从动轴b、从动轴c、从动轴d、齿轮传动机构a、齿轮传动机构b、连杆机构a、连杆机构b、凸轮a、凸轮b。所述主动轴通过齿轮传动机构a带动从动轴a进行转动;所述从动轴a通过齿轮传动机构b带动从动轴b进行转动;所述从动轴b通过连杆机构a带动从动轴c进行转动;所述从动轴a通过连杆机构b带动从动轴c进行转动。该运动机构传动精度高,体积小、结构简单、拆卸方便,凸轮的使用能实现间歇性运动,增加运动的稳定性。