
一种基于多尺度CNN和连续CRF的单目图像深度估计方法.pdf

涵蓄****09

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于多尺度CNN和连续CRF的单目图像深度估计方法.pdf
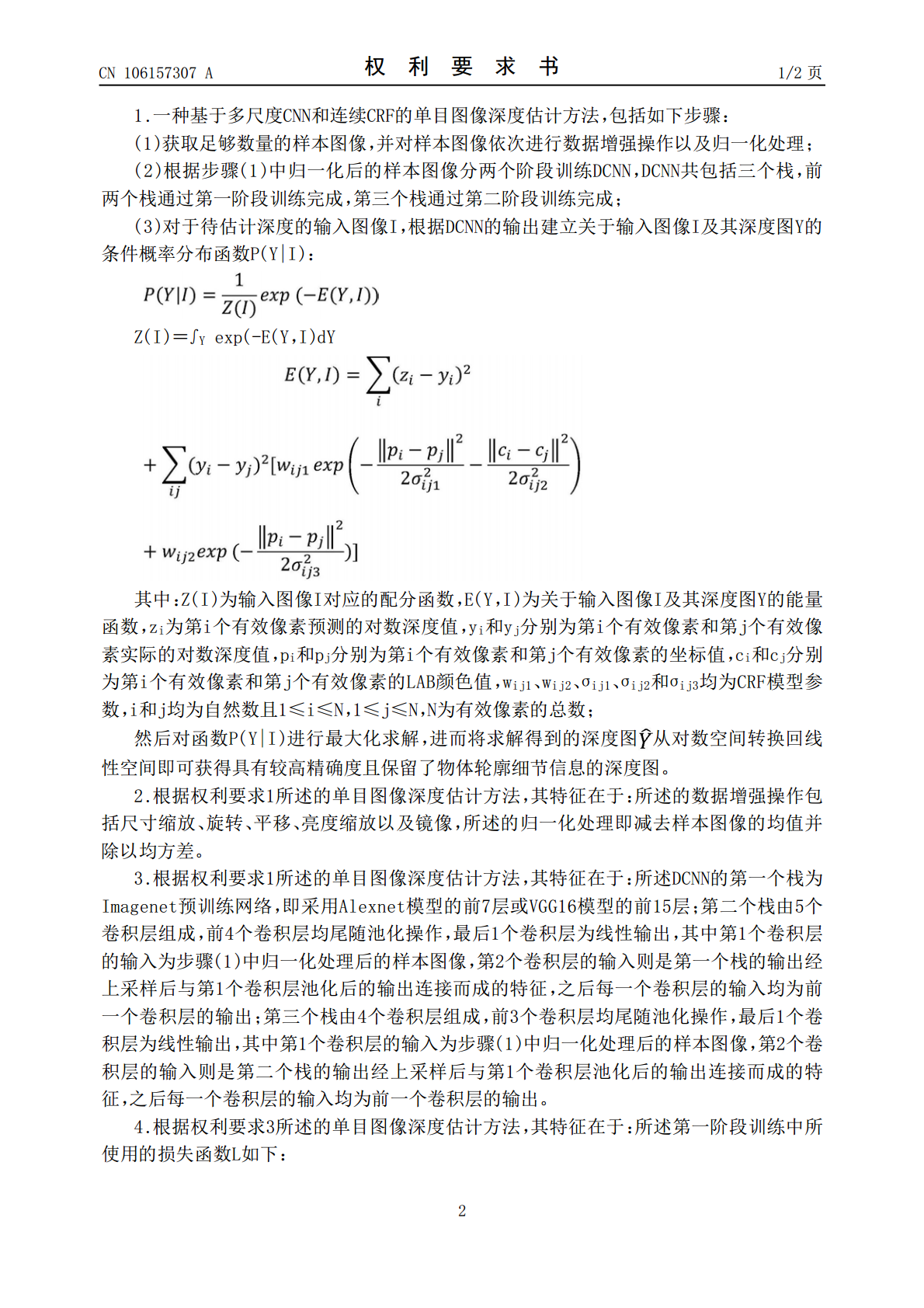
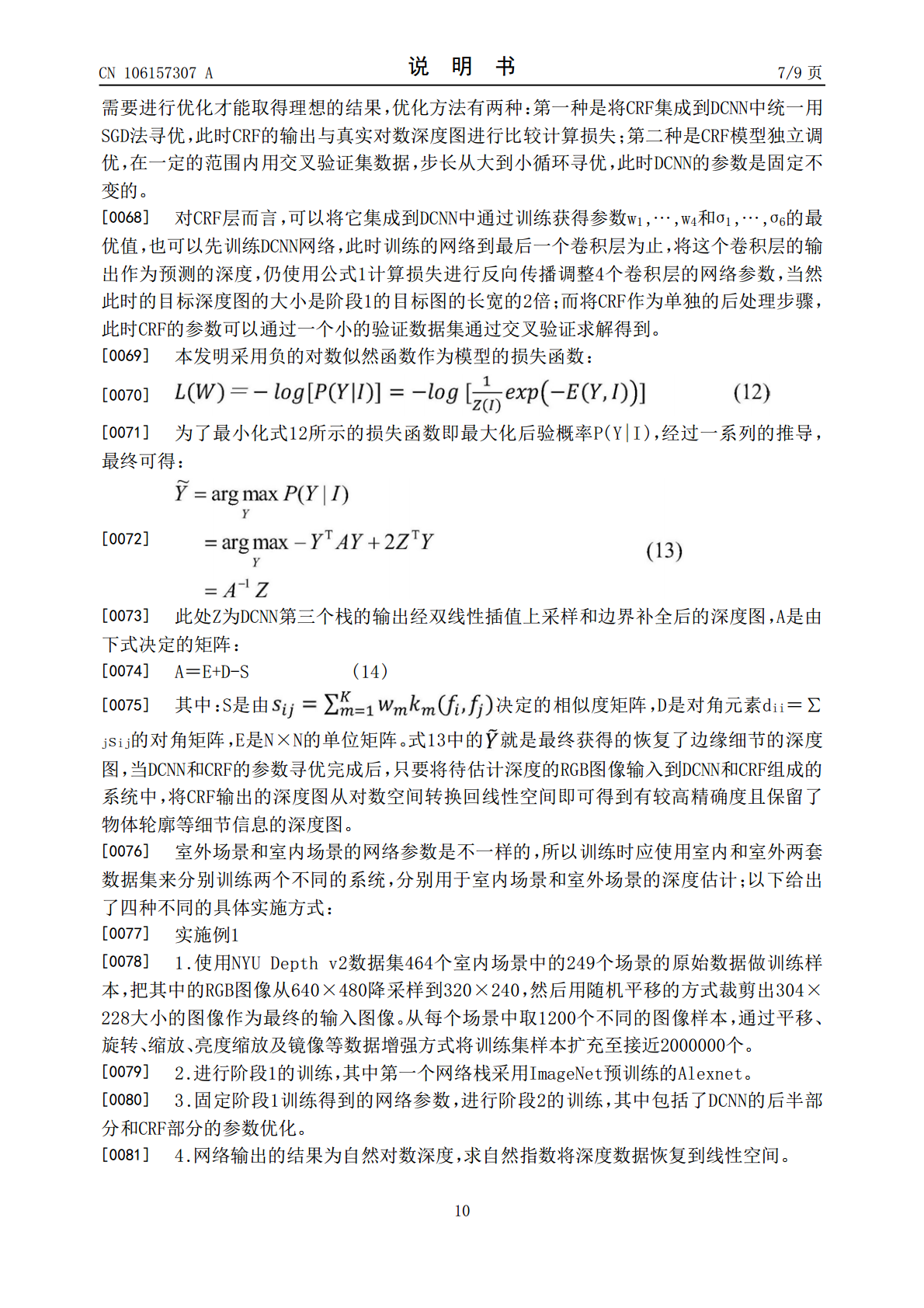
本发明公开了一种基于多尺度CNN和连续CRF的单目图像深度估计方法,其利用CRF模型根据DCNN的输出深度图计算单点势能,根据输入RGB图像计算成对稀疏势能,最后用MAP(最大化后验概率)算法推导出优化的深度图。本发明结合了多尺度CNN和连续CRF优化思想,不仅能够以较高的精确度估计出深度图,又能使得到的深度图轮廓清晰;本发明所估计的深度有比较高的分辨率,而且所得到的深度图能保留场景中所有对象的深度细节信息,具有更好的视觉效果。
一种基于多尺度特征融合的单目深度估计方法.pdf
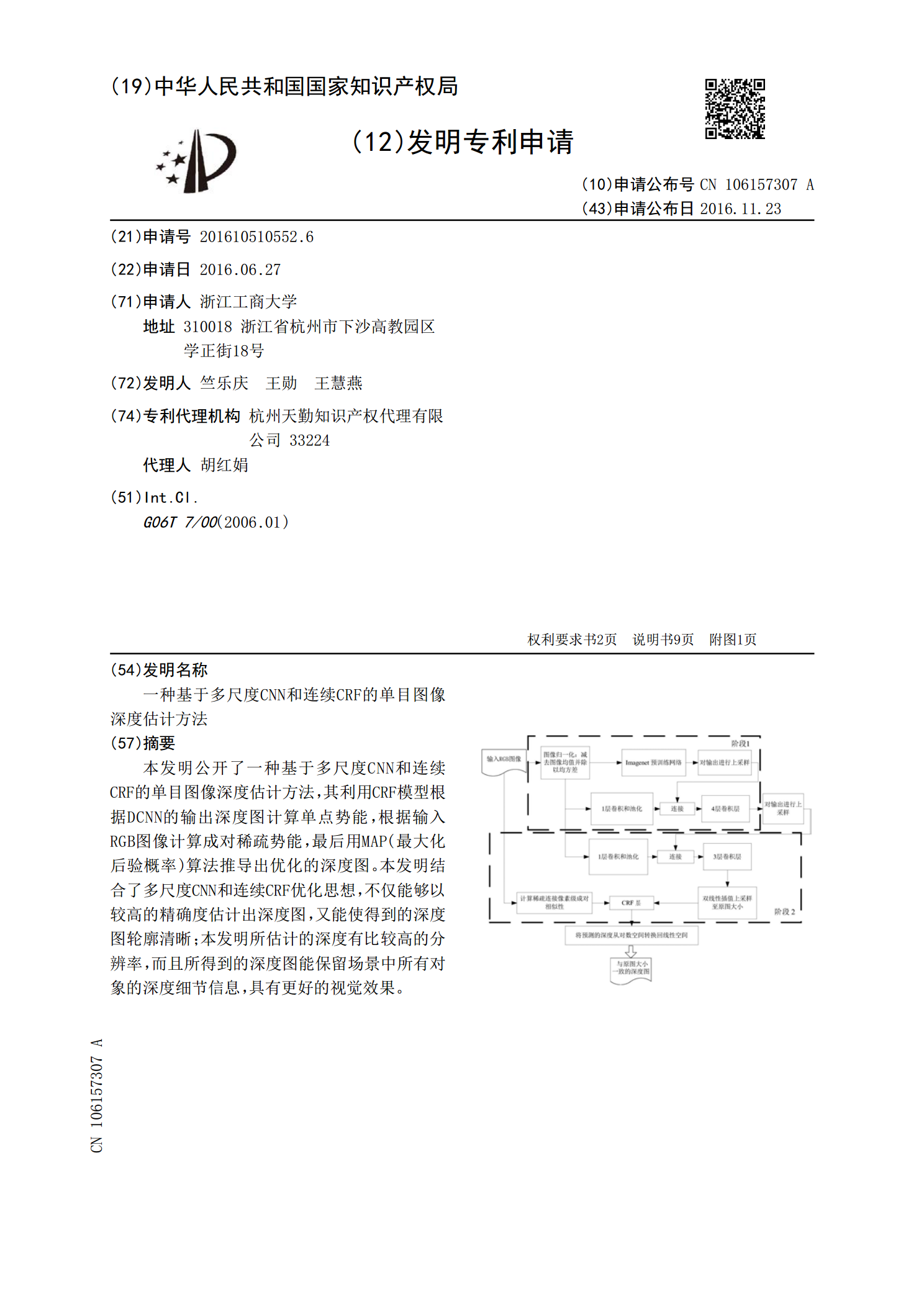
本发明涉及一种基于多尺度特征融合的单目深度估计方法,属于三维场景感知领域,包括以下步骤:S1:引入Non‑Local注意力机制,构造混合的归一化函数;S2:在特征提取网络的本层特征、深层特征和浅层特征之间引入注意力机制,计算特征图上特征之间的关联信息矩阵;S3:构建多尺度特征融合模块;S4:在解码网络引入空洞空间金字塔池化模块,扩大卷积的感受野,迫使网络学习更多的局部细节信息。本发明有效的实现了特征提取网络分层特征之间跨空间和跨尺度的特征融合,提高了网络学习局部细节的能力并使深度图在重建过程中完成了细粒度

基于多尺度注意力导向网络的单目图像深度估计.docx
基于多尺度注意力导向网络的单目图像深度估计标题:基于多尺度注意力导向网络的单目图像深度估计摘要:单目图像深度估计在计算机视觉领域具有重要的应用价值,在遥感、智能驾驶等领域有着广泛的应用。然而,由于单目图像的深度信息丢失,深度估计任务具有挑战性。本文提出了一种基于多尺度注意力导向网络的单目图像深度估计方法,该方法通过引入多尺度特征融合和注意力机制,有效地提高了深度估计的准确性和鲁棒性。实验结果表明,本文所提出的方法相较于传统的单尺度方法,在深度估计任务中具有更好的性能和泛化能力。关键词:单目图像深度估计,多

基于CNN特征提取和加权深度迁移的单目图像深度估计.docx
基于CNN特征提取和加权深度迁移的单目图像深度估计标题:基于CNN特征提取和加权深度迁移的单目图像深度估计摘要:通过计算机视觉和深度学习技术的发展,单目图像深度估计成为一个热门的研究领域。本文提出了一种基于CNN特征提取和加权深度迁移的方法,用于提高单目图像深度估计的准确性和稳定性。首先,我们使用卷积神经网络(CNN)来提取图像的特征表示,然后通过加权深度迁移方法将这些特征映射到深度估计空间,最后利用训练好的模型进行单目图像的深度估计。1.引言单目图像深度估计是指通过分析单个图像来推断该图像中物体的距离信

基于深度学习的单目图像深度估计.docx
基于深度学习的单目图像深度估计基于深度学习的单目图像深度估计摘要:深度图像是计算机视觉领域中一个重要的问题,它在许多领域中发挥着重要的作用,如三维重建、物体检测和跟踪等。传统的方法通常依赖于多个相机或者深度传感器来获取深度信息。然而,这种方法通常成本昂贵且不便于应用,因此,单目图像深度估计成为一个热门的研究方向。近年来,深度学习的快速发展为单目图像深度估计提供了新的机会。本文将综述基于深度学习的单目图像深度估计的研究现状和发展趋势,并讨论其中的挑战和解决方案。1.引言深度图像是指每个像素点相对于相机的距离