
基于观测器的超声波电机伺服控制系统滞回补偿控制方法.pdf

一吃****新冬


1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于观测器的超声波电机伺服控制系统滞回补偿控制方法.pdf
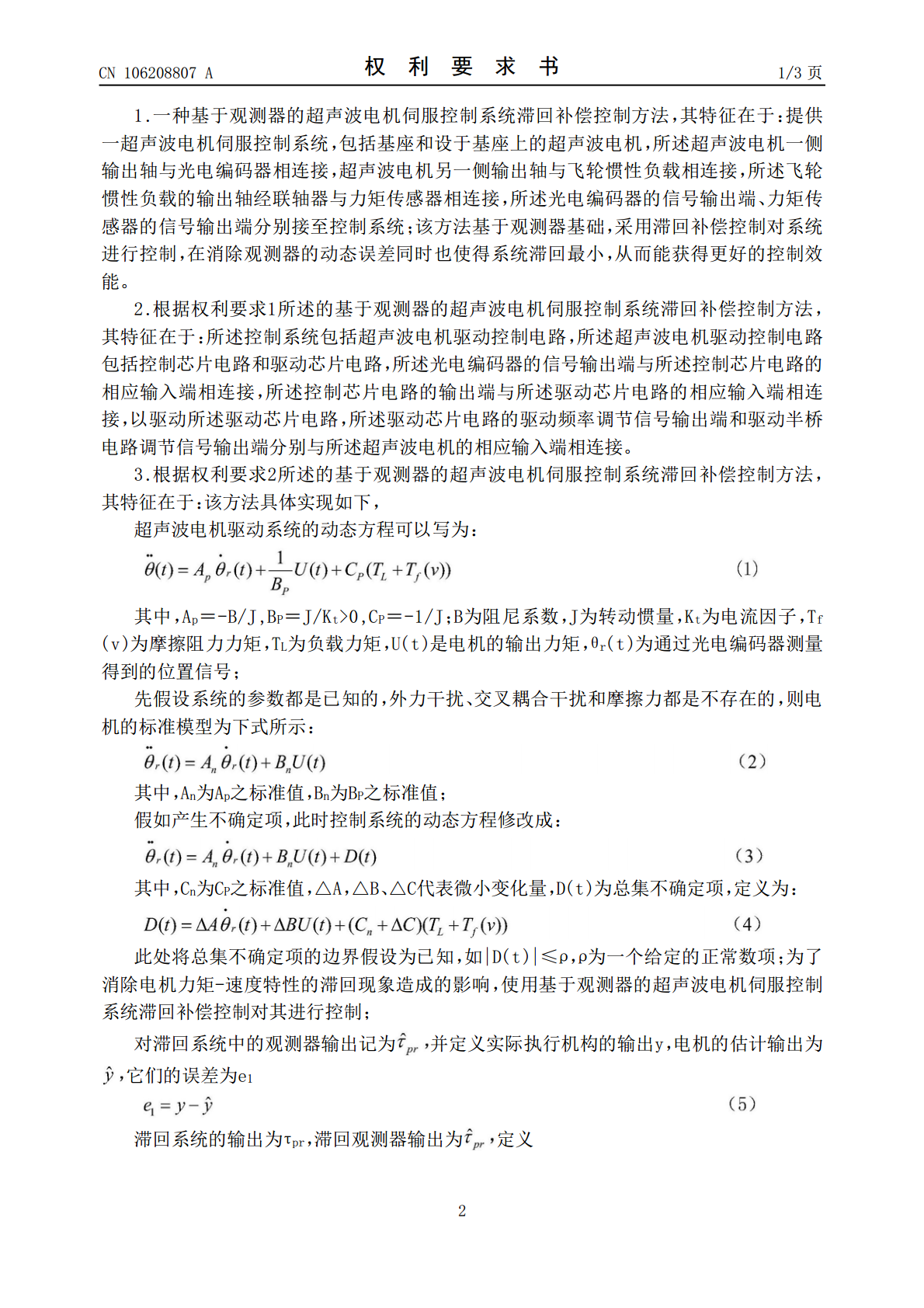
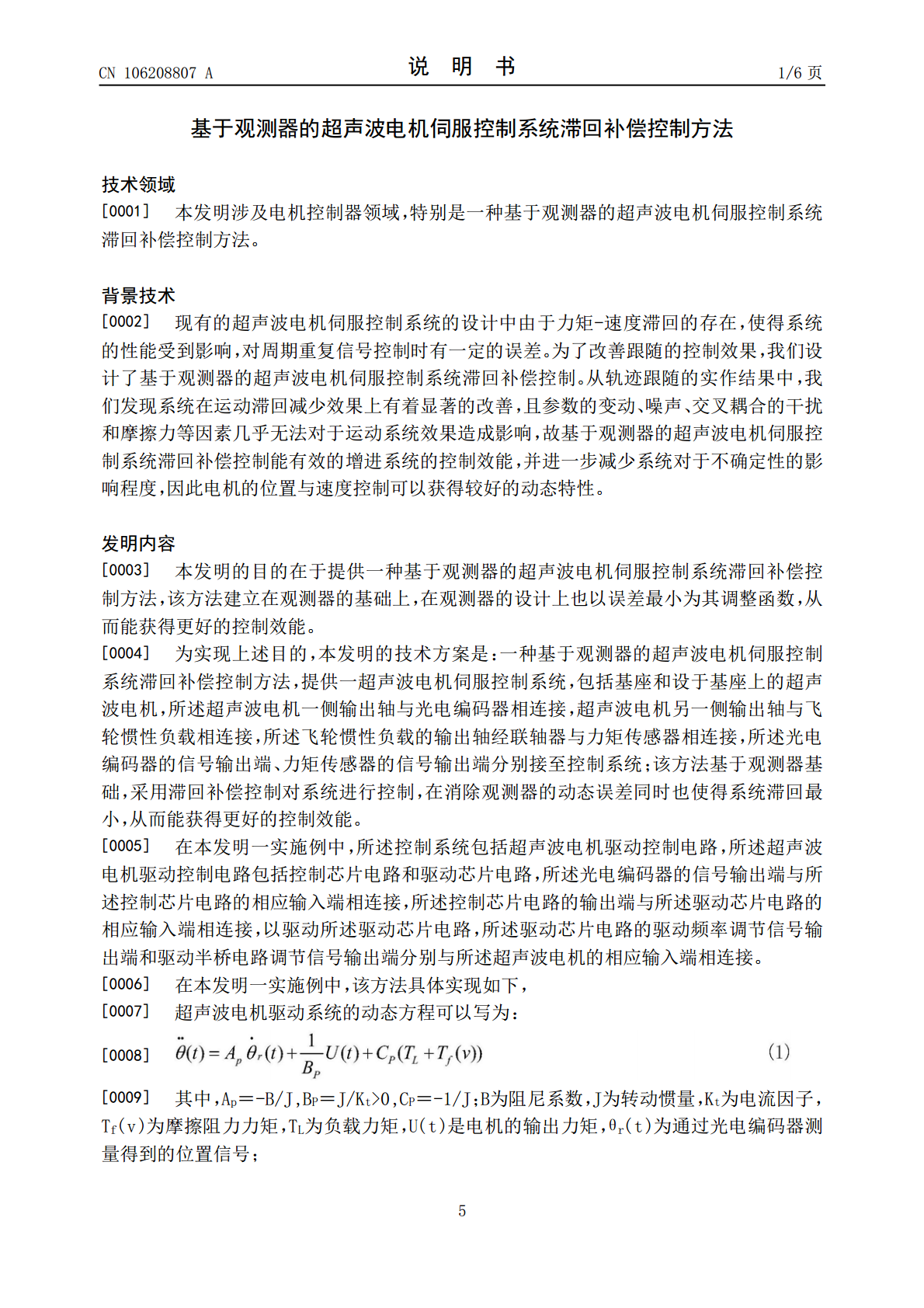
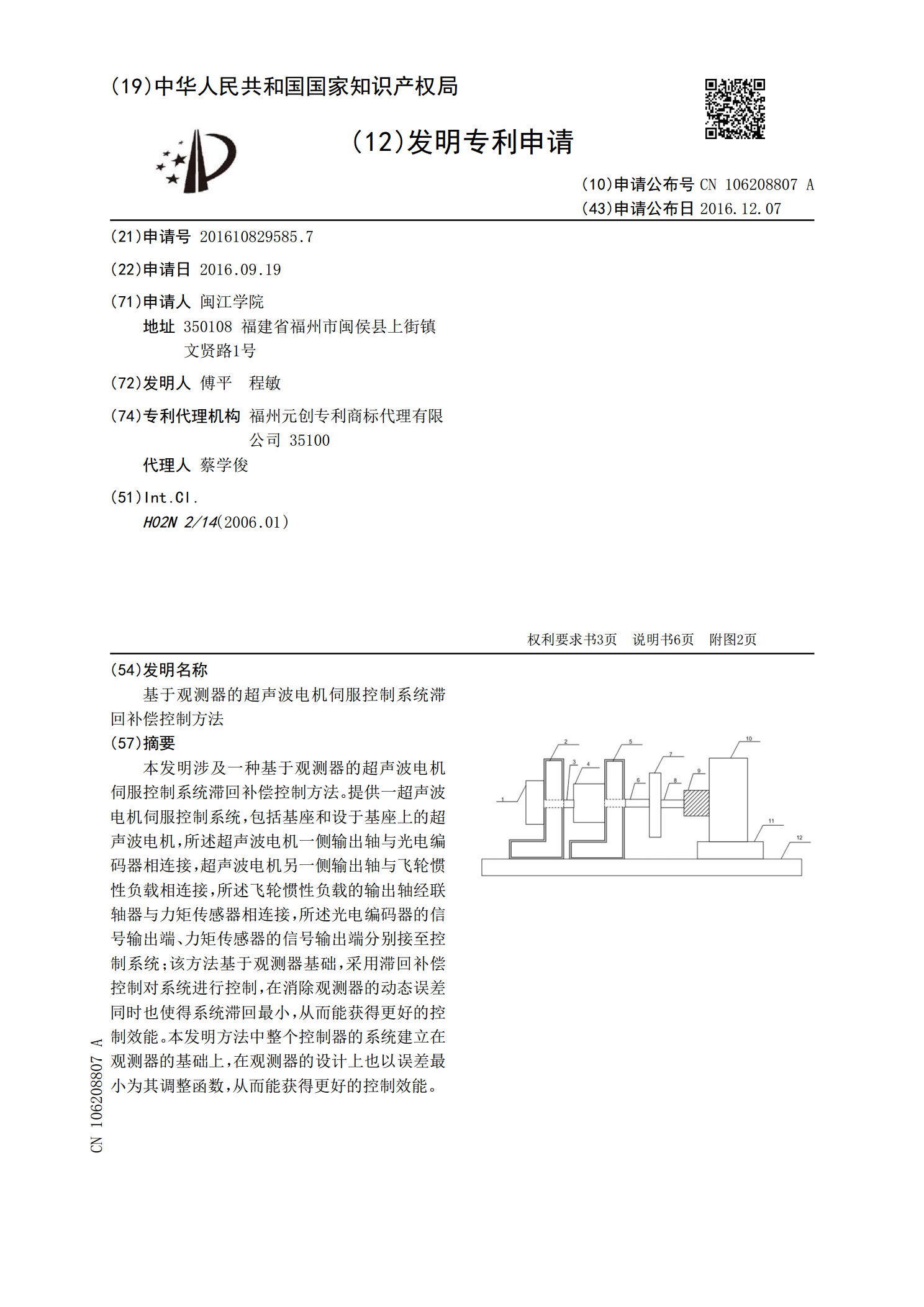
本发明涉及一种基于观测器的超声波电机伺服控制系统滞回补偿控制方法。提供一超声波电机伺服控制系统,包括基座和设于基座上的超声波电机,所述超声波电机一侧输出轴与光电编码器相连接,超声波电机另一侧输出轴与飞轮惯性负载相连接,所述飞轮惯性负载的输出轴经联轴器与力矩传感器相连接,所述光电编码器的信号输出端、力矩传感器的信号输出端分别接至控制系统;该方法基于观测器基础,采用滞回补偿控制对系统进行控制,在消除观测器的动态误差同时也使得系统滞回最小,从而能获得更好的控制效能。本发明方法中整个控制器的系统建立在观测器的基础
基于Stop算子的超声波电机伺服控制系统对称滞回控制方法.pdf
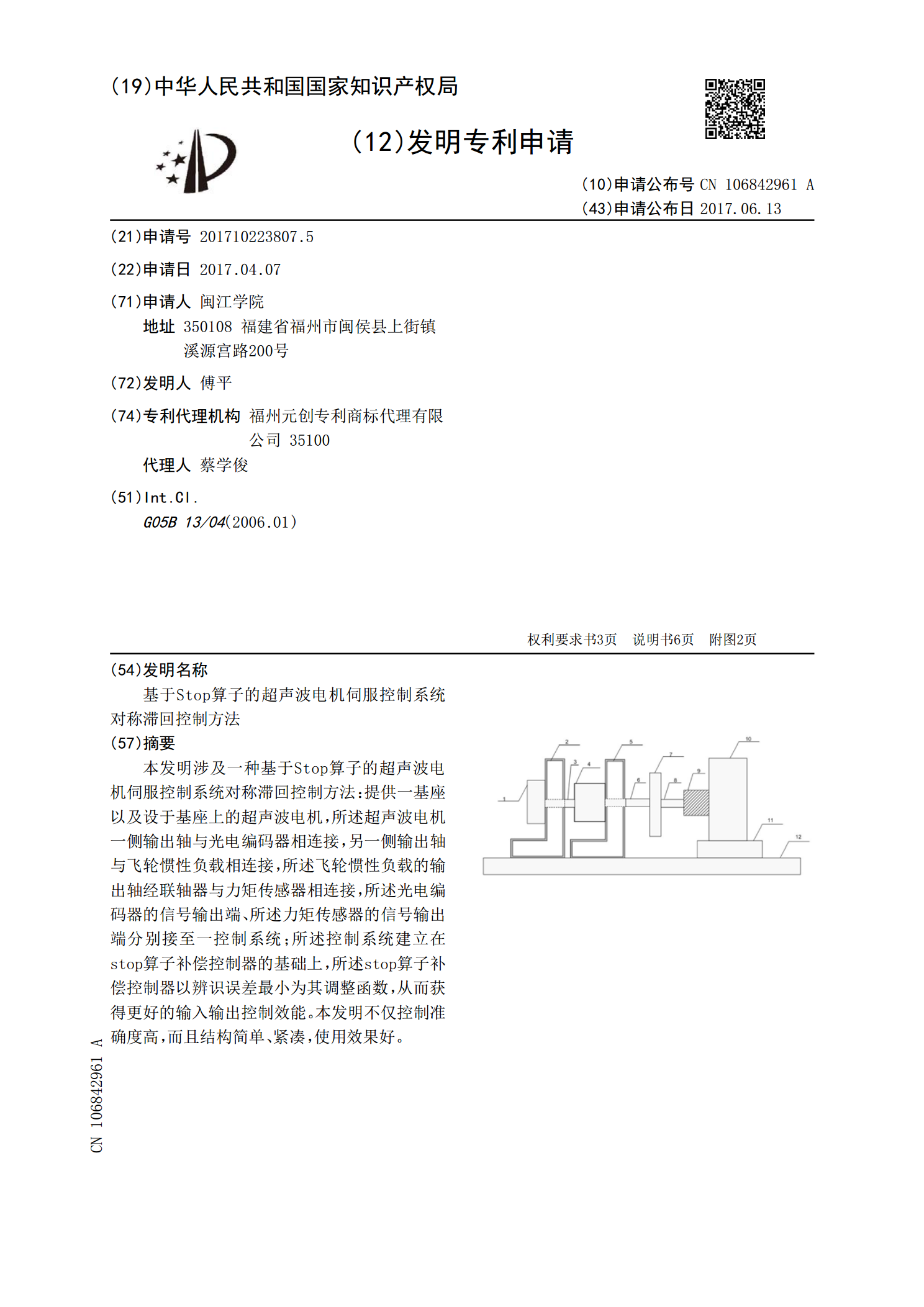
本发明涉及一种基于Stop算子的超声波电机伺服控制系统对称滞回控制方法:提供一基座以及设于基座上的超声波电机,所述超声波电机一侧输出轴与光电编码器相连接,另一侧输出轴与飞轮惯性负载相连接,所述飞轮惯性负载的输出轴经联轴器与力矩传感器相连接,所述光电编码器的信号输出端、所述力矩传感器的信号输出端分别接至一控制系统;所述控制系统建立在stop算子补偿控制器的基础上,所述stop算子补偿控制器以辨识误差最小为其调整函数,从而获得更好的输入输出控制效能。本发明不仅控制准确度高,而且结构简单、紧凑,使用效果好。
超声波电机伺服控制系统不对称滞回补偿控制装置及方法.pdf
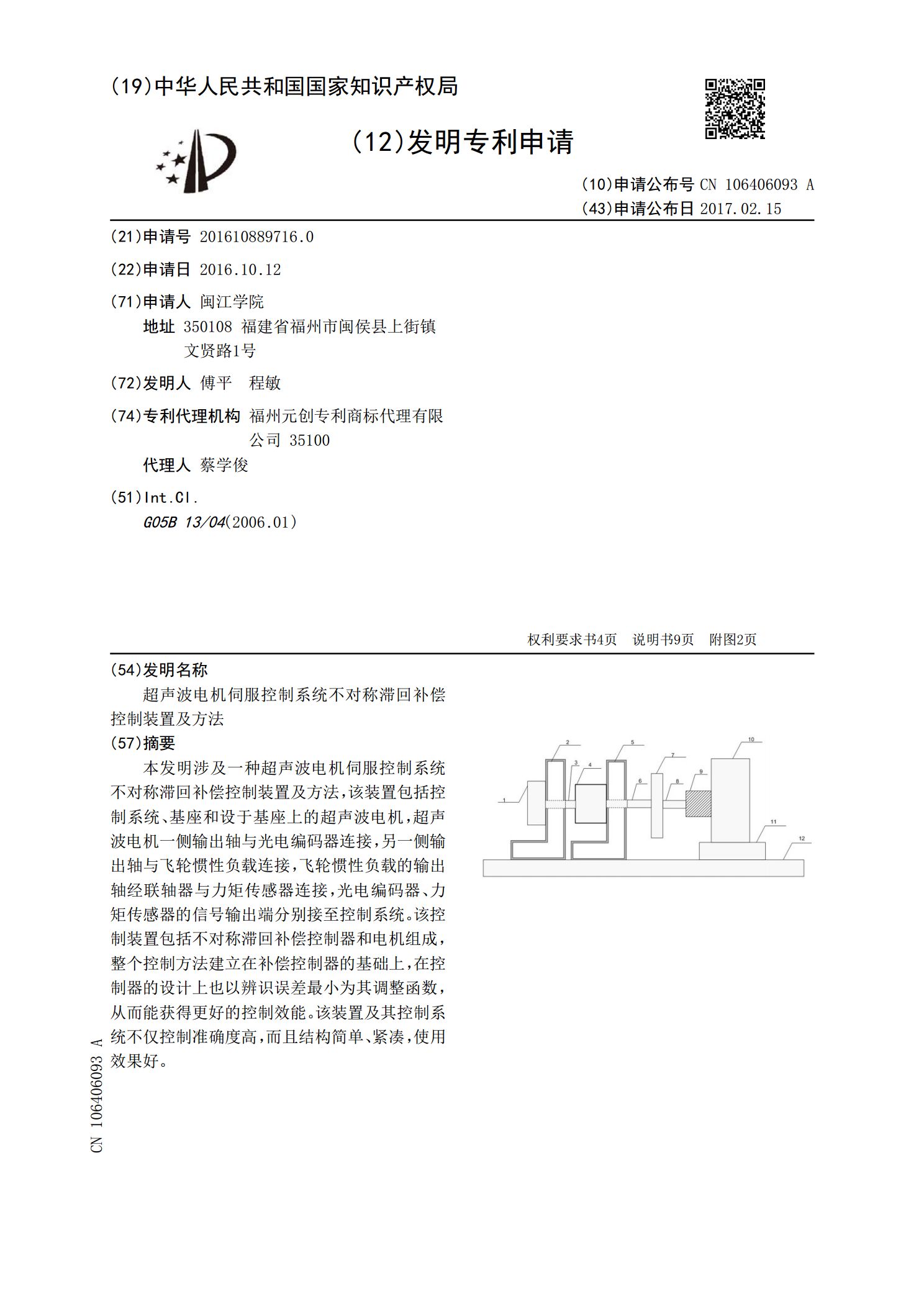
本发明涉及一种超声波电机伺服控制系统不对称滞回补偿控制装置及方法,该装置包括控制系统、基座和设于基座上的超声波电机,超声波电机一侧输出轴与光电编码器连接,另一侧输出轴与飞轮惯性负载连接,飞轮惯性负载的输出轴经联轴器与力矩传感器连接,光电编码器、力矩传感器的信号输出端分别接至控制系统。该控制装置包括不对称滞回补偿控制器和电机组成,整个控制方法建立在补偿控制器的基础上,在控制器的设计上也以辨识误差最小为其调整函数,从而能获得更好的控制效能。该装置及其控制系统不仅控制准确度高,而且结构简单、紧凑,使用效果好。
基于状态观测器的超声波电机伺服控制系统轮廓控制方法.pdf
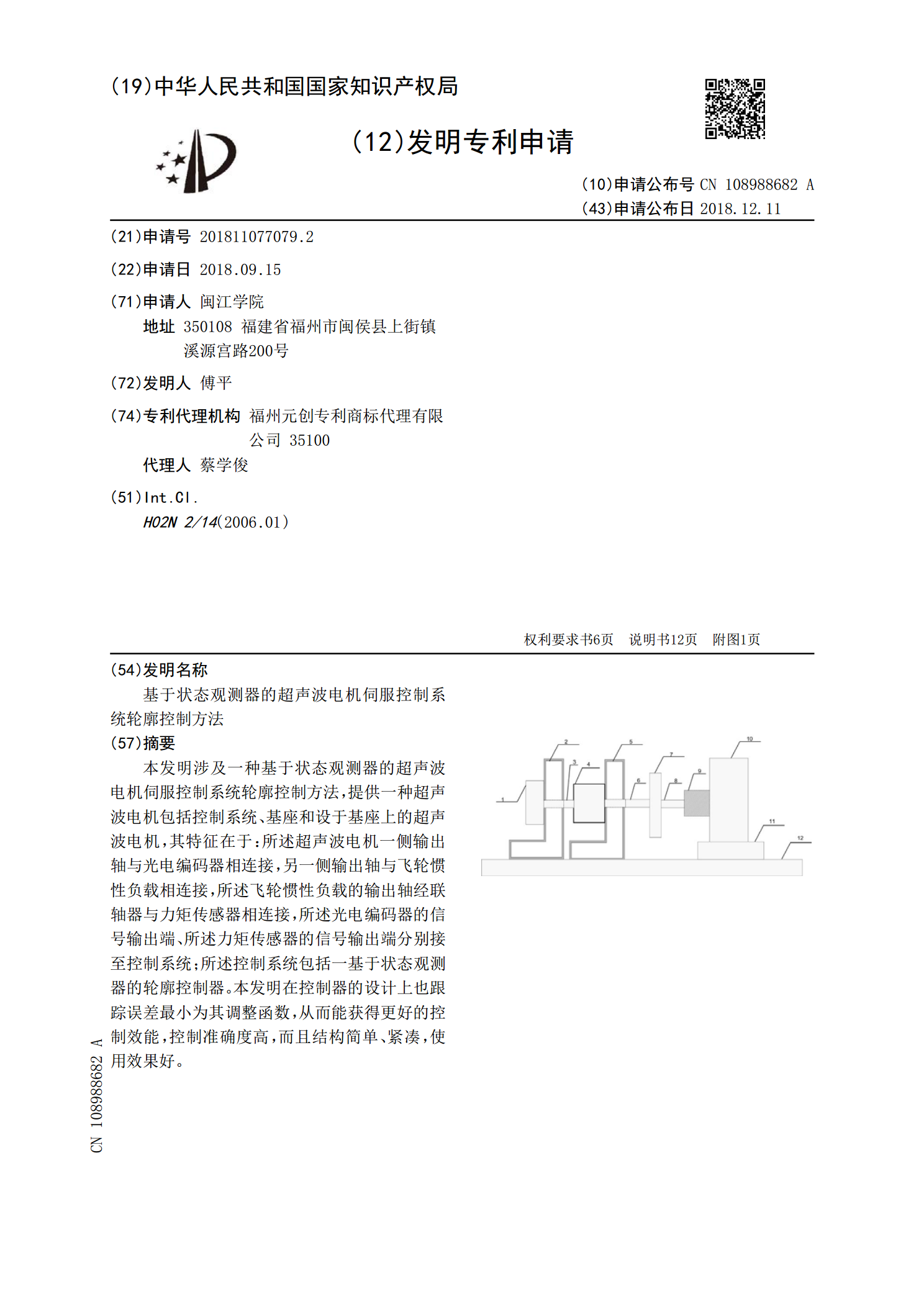
本发明涉及一种基于状态观测器的超声波电机伺服控制系统轮廓控制方法,提供一种超声波电机包括控制系统、基座和设于基座上的超声波电机,其特征在于:所述超声波电机一侧输出轴与光电编码器相连接,另一侧输出轴与飞轮惯性负载相连接,所述飞轮惯性负载的输出轴经联轴器与力矩传感器相连接,所述光电编码器的信号输出端、所述力矩传感器的信号输出端分别接至控制系统;所述控制系统包括一基于状态观测器的轮廓控制器。本发明在控制器的设计上也跟踪误差最小为其调整函数,从而能获得更好的控制效能,控制准确度高,而且结构简单、紧凑,使用效果好。
一种超声波电机伺服控制系统摩擦力滞回控制方法.pdf
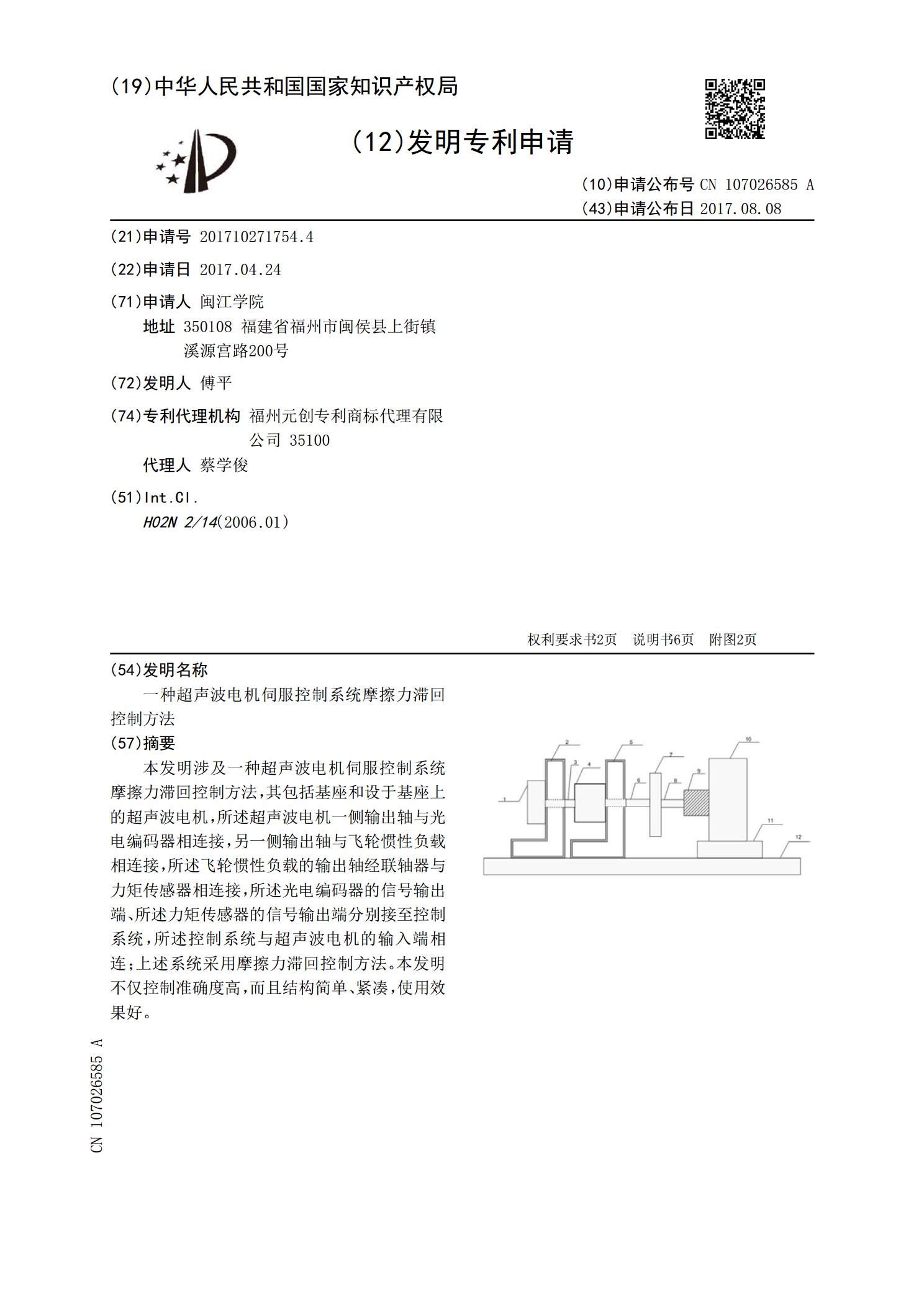
本发明涉及一种超声波电机伺服控制系统摩擦力滞回控制方法,其包括基座和设于基座上的超声波电机,所述超声波电机一侧输出轴与光电编码器相连接,另一侧输出轴与飞轮惯性负载相连接,所述飞轮惯性负载的输出轴经联轴器与力矩传感器相连接,所述光电编码器的信号输出端、所述力矩传感器的信号输出端分别接至控制系统,所述控制系统与超声波电机的输入端相连;上述系统采用摩擦力滞回控制方法。本发明不仅控制准确度高,而且结构简单、紧凑,使用效果好。