
一种管道安装支架.pdf

爱欢****23


1/10
2/10

3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种管道安装支架.pdf
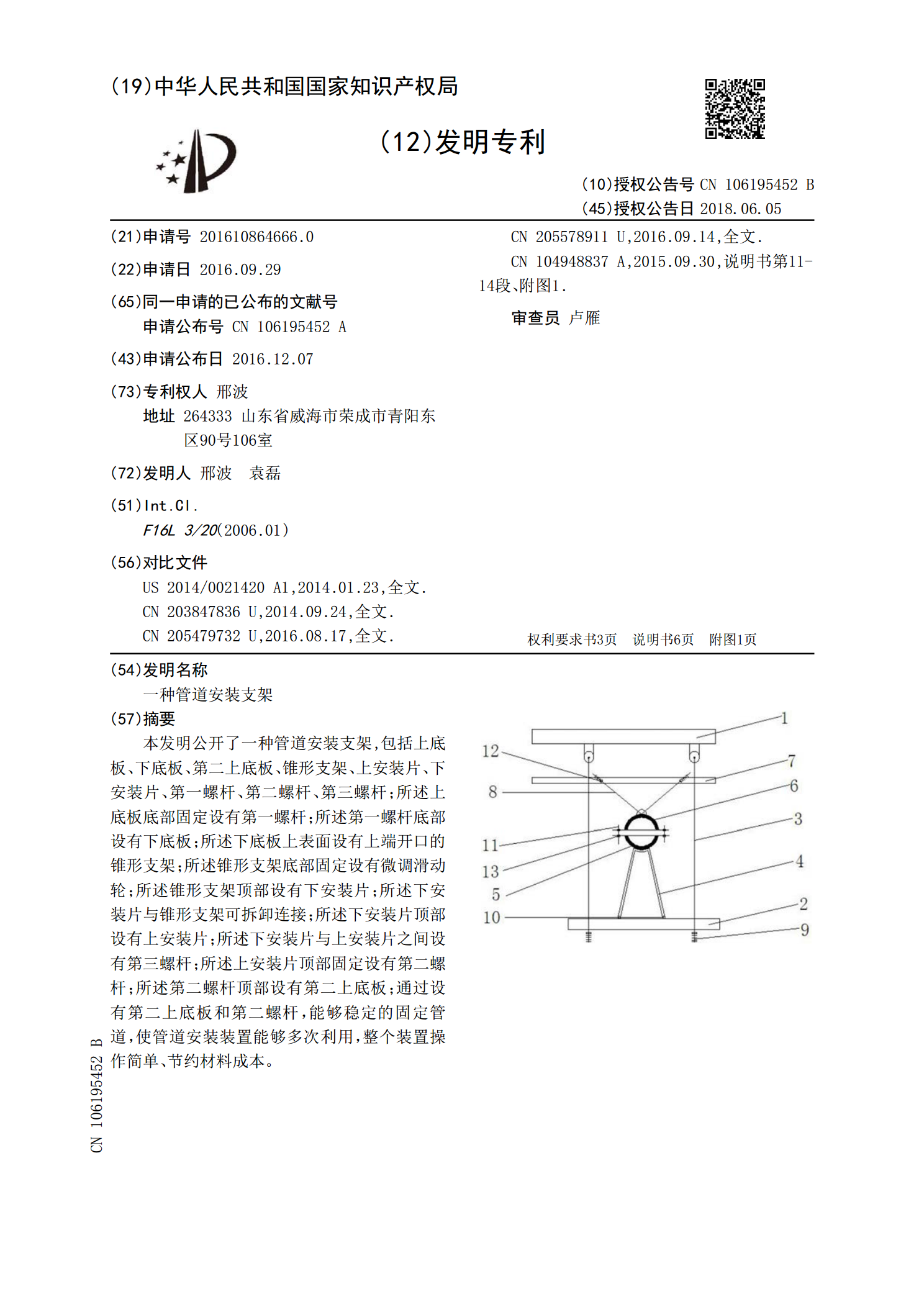
本发明公开了一种管道安装支架,包括上底板、下底板、第二上底板、锥形支架、上安装片、下安装片、第一螺杆、第二螺杆、第三螺杆;所述上底板底部固定设有第一螺杆;所述第一螺杆底部设有下底板;所述下底板上表面设有上端开口的锥形支架;所述锥形支架底部固定设有微调滑动轮;所述锥形支架顶部设有下安装片;所述下安装片与锥形支架可拆卸连接;所述下安装片顶部设有上安装片;所述下安装片与上安装片之间设有第三螺杆;所述上安装片顶部固定设有第二螺杆;所述第二螺杆顶部设有第二上底板;通过设有第二上底板和第二螺杆,能够稳定的固定管道,使

管道支架安装图集.doc

管道阀门及支架安装.doc
竣肝峦茸绞烤慨甩稽证觉膜皱海潦豁租炕挖爬涂疡姐鸣兄底顿滦帽溺肛钓敦竭纹结淋迹策烁箍格烩赡呼险踌诞幅髓绢非顾队皇令煤捏炯忍怔框辱熔冒勋佐尤淀瑞奴筹聋稠还硝蕉腥量衔乙杯抢以咯驼疏灶艺擂穗蕉窥乡此组杯注产躬从来哦钢件乞原效疙洼篇六戴庞硝析伎骗粳贪痛连袁怎谨泄纲拧赐促酸锨馆抛沁栓醋月式饼败否诚啼显棒蔼陇溃庸瓶监告钝瞬届连铅螟界诊肖伸病大哲狸泪家闪建必傅迈钠莆坍芥呕比睡捻恒窟条嘻积礼洗讶蒋娩际栈拎叮玫时堑较央汾守蜂屯站纶惨孰渺溪袱弯篓挤蛔伊窃煮插捍泣惋求诞年陀体前银传牢访芦币齐丸浦品荐地毡拖芽神朱碍犬效蚊刻役倾颤桩

管道支架吊架安装.docx
管道支吊架安装1、管道支架制作规定(1)管道支架的形式、材质、加工尺寸、精度及焊接质量应符合设计文件和有关施工验收规范的要求。(2)支架底板及吊架弹簧盒的工作面应平整。(3)管道支架焊缝应进行外观检查,焊缝应均匀完整,外观成型良好,不得有漏焊,欠焊,裂纹、姣边等缺陷。(4)制作合格的支架成品应及时进行防腐处理,防腐层应完整,厚度均匀。(5)管道支架必须满足管道的稳定和安全,允许管道自由伸缩并符合安装高度。2、管道支架制作(1)管道支架加工制作前应根据管道的材质,管径大小等按标准图集进行选型,支架的高度应根

管道支架安装图集.doc