
一种切水果机器人.pdf

Th****84

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种切水果机器人.pdf
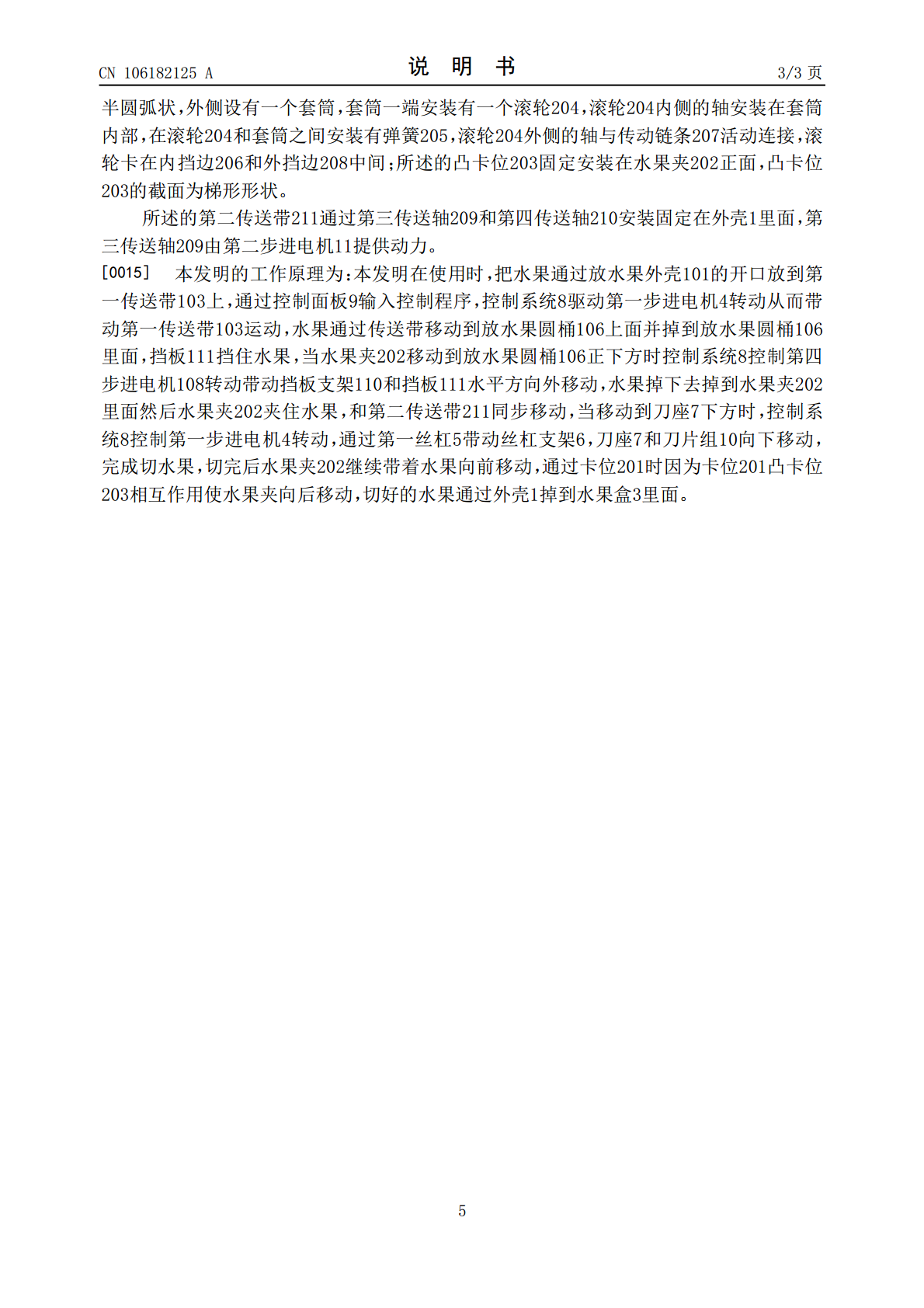
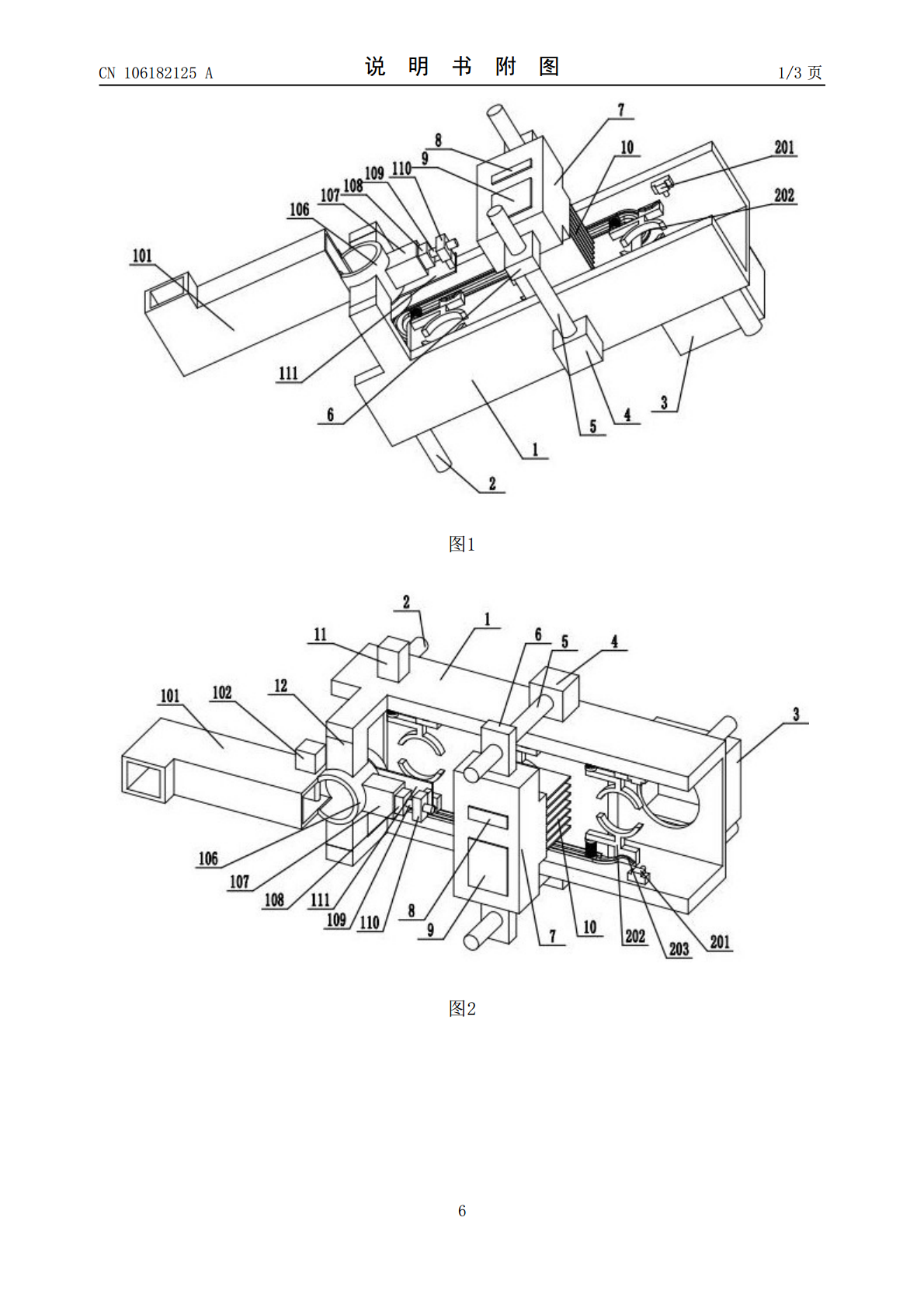
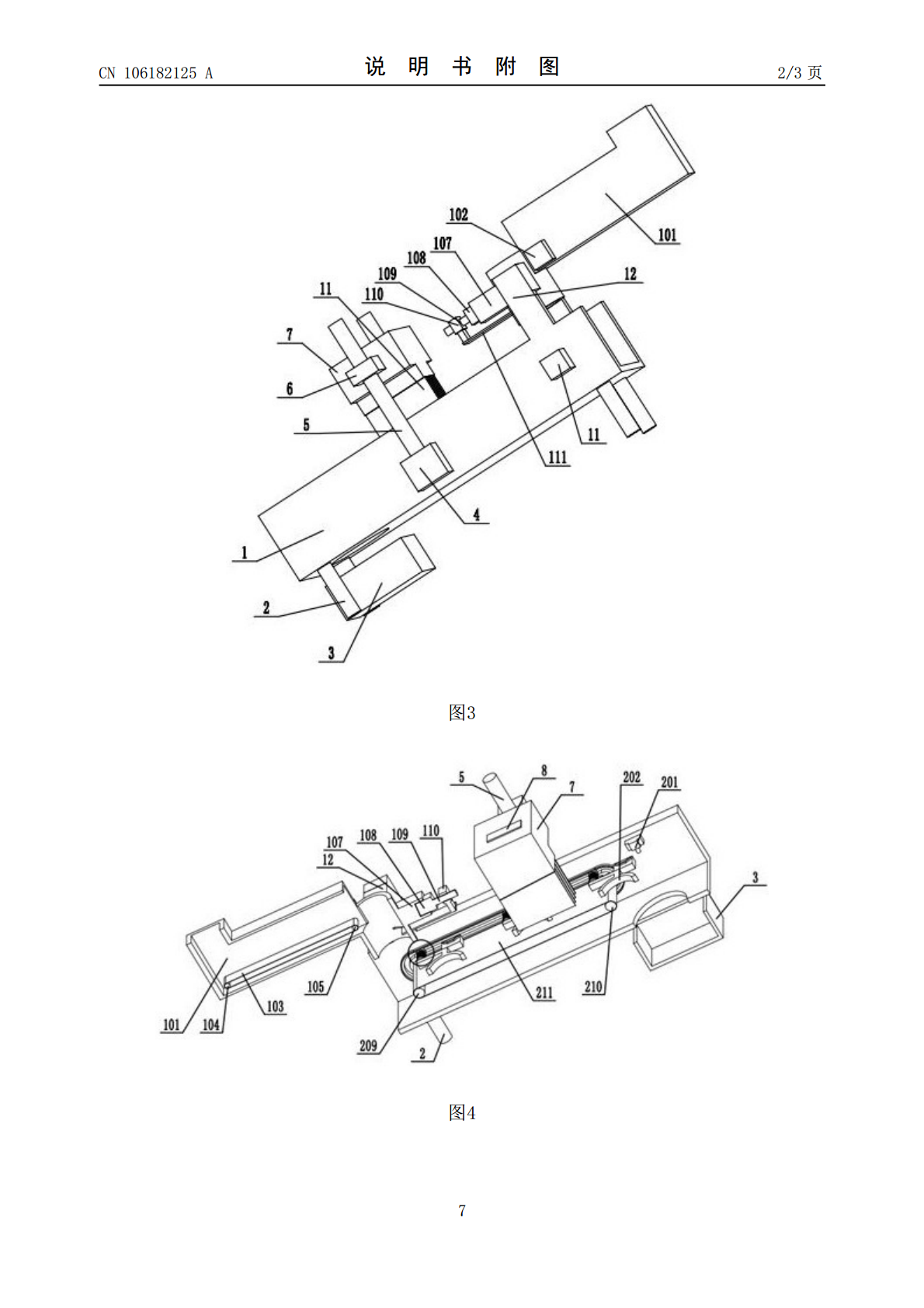
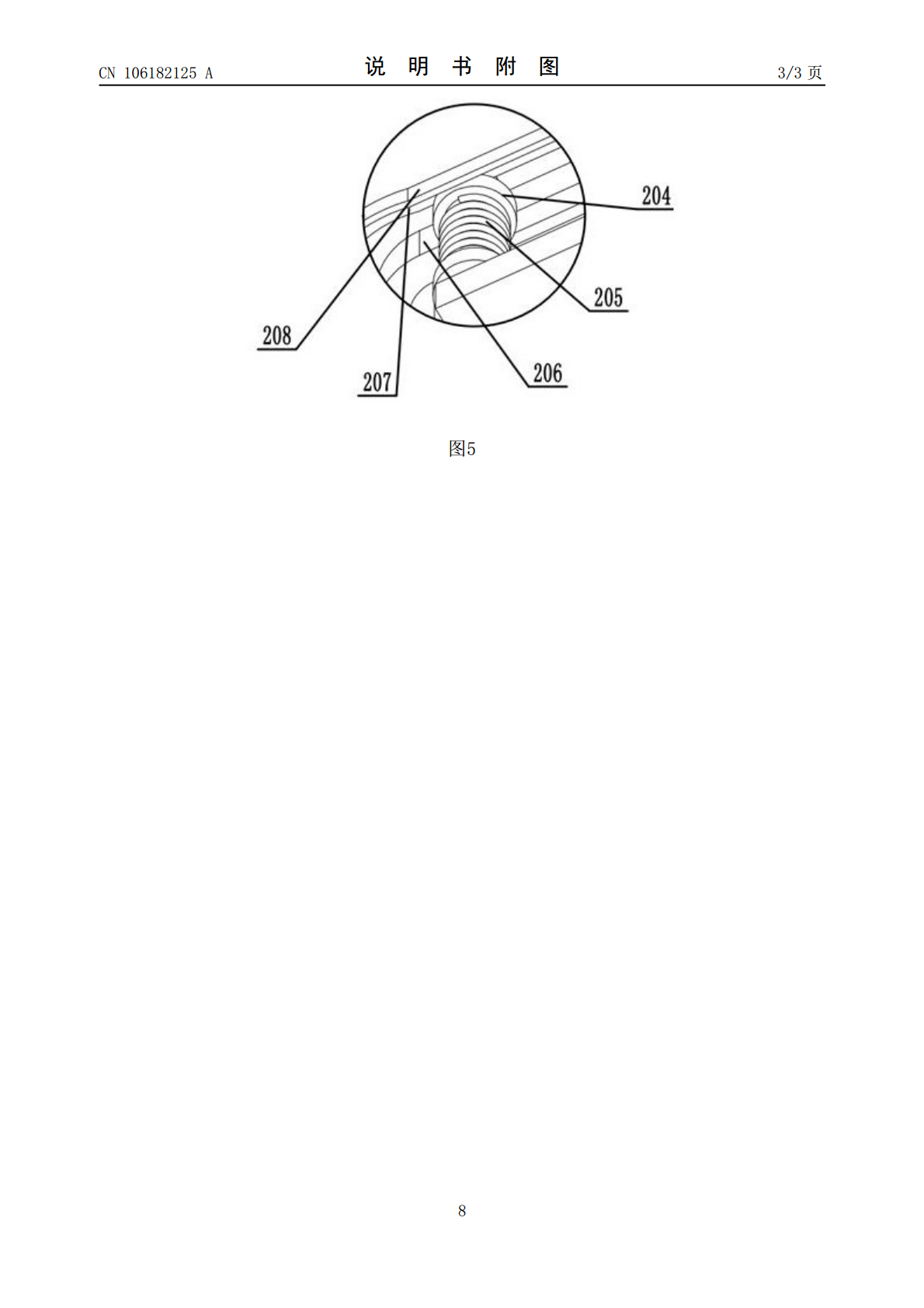
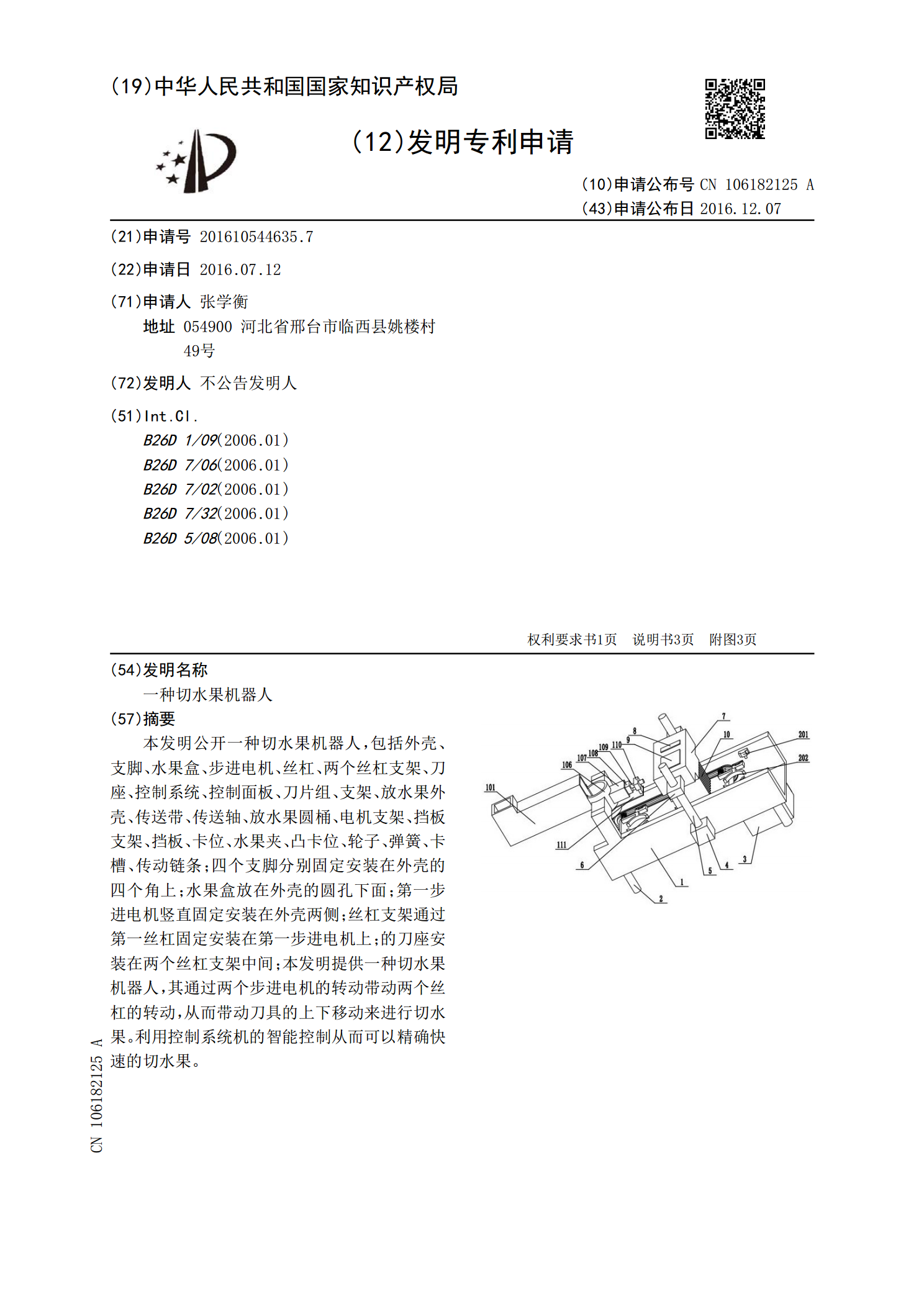
本发明公开一种切水果机器人,包括外壳、支脚、水果盒、步进电机、丝杠、两个丝杠支架、刀座、控制系统、控制面板、刀片组、支架、放水果外壳、传送带、传送轴、放水果圆桶、电机支架、挡板支架、挡板、卡位、水果夹、凸卡位、轮子、弹簧、卡槽、传动链条;四个支脚分别固定安装在外壳的四个角上;水果盒放在外壳的圆孔下面;第一步进电机竖直固定安装在外壳两侧;丝杠支架通过第一丝杠固定安装在第一步进电机上;的刀座安装在两个丝杠支架中间;本发明提供一种切水果机器人,其通过两个步进电机的转动带动两个丝杠的转动,从而带动刀具的上下移动来
一种水果切条机.pdf
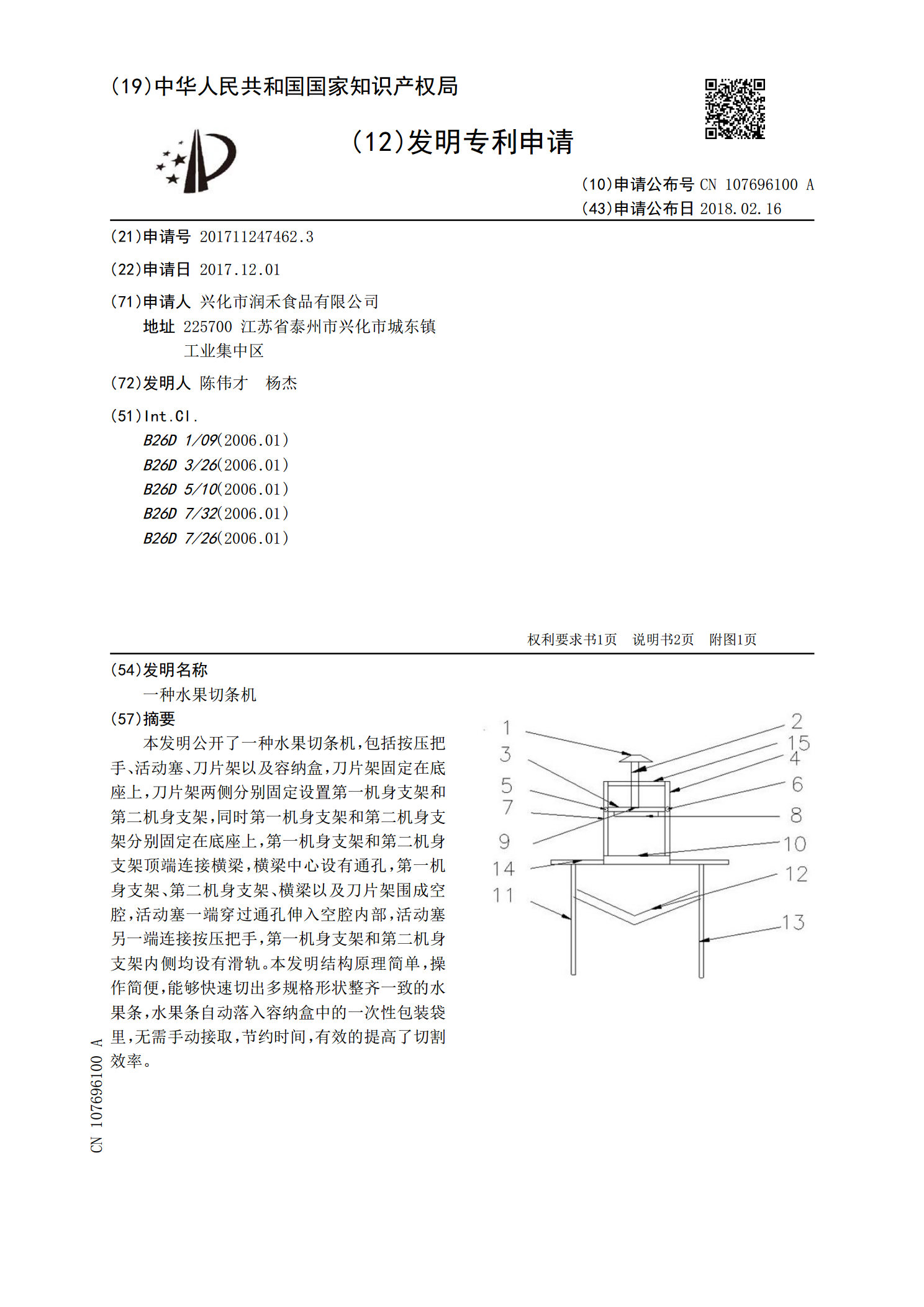
本发明公开了一种水果切条机,包括按压把手、活动塞、刀片架以及容纳盒,刀片架固定在底座上,刀片架两侧分别固定设置第一机身支架和第二机身支架,同时第一机身支架和第二机身支架分别固定在底座上,第一机身支架和第二机身支架顶端连接横梁,横梁中心设有通孔,第一机身支架、第二机身支架、横梁以及刀片架围成空腔,活动塞一端穿过通孔伸入空腔内部,活动塞另一端连接按压把手,第一机身支架和第二机身支架内侧均设有滑轨。本发明结构原理简单,操作简便,能够快速切出多规格形状整齐一致的水果条,水果条自动落入容纳盒中的一次性包装袋里,无需
一种手动水果切条器.pdf
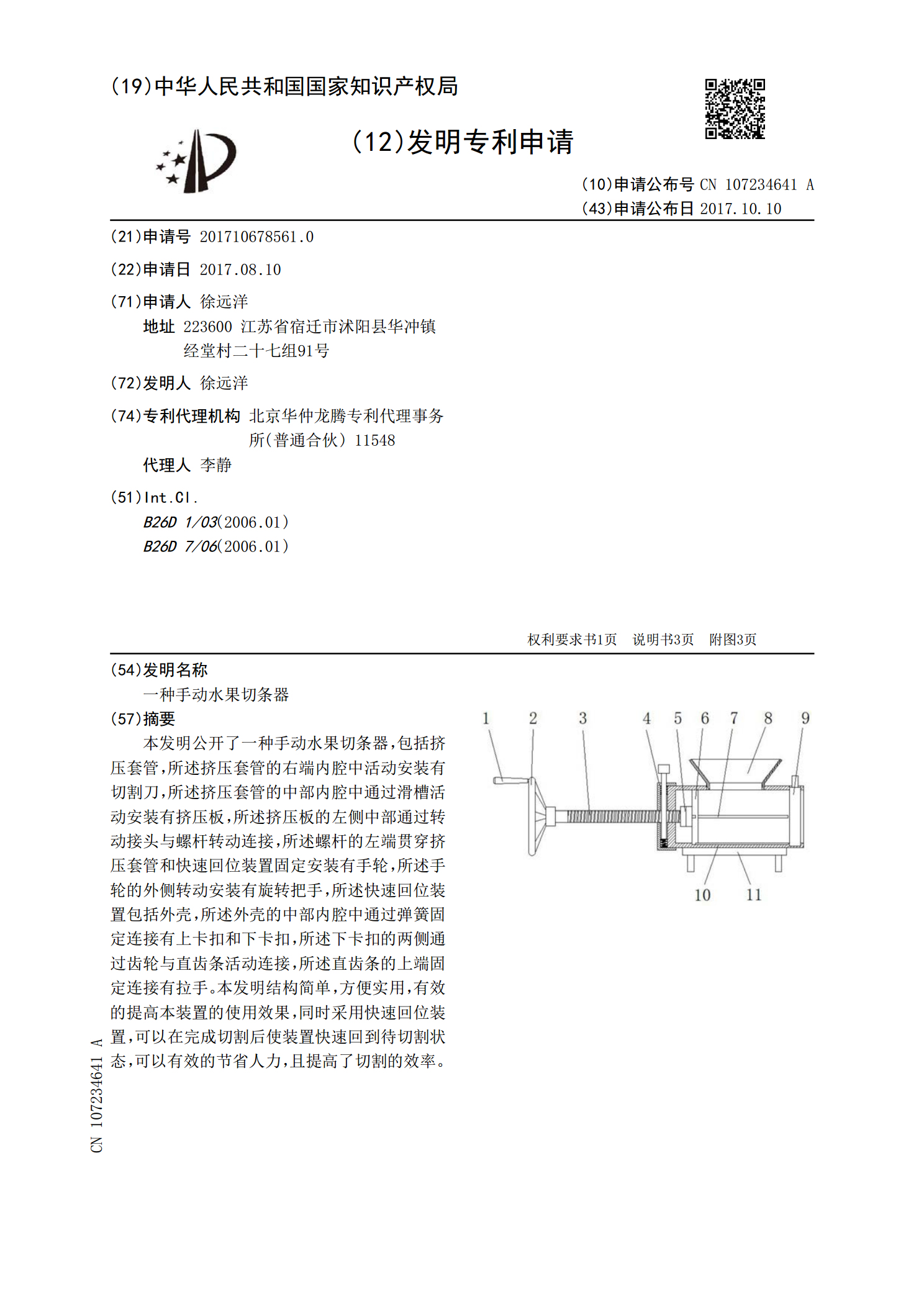
本发明公开了一种手动水果切条器,包括挤压套管,所述挤压套管的右端内腔中活动安装有切割刀,所述挤压套管的中部内腔中通过滑槽活动安装有挤压板,所述挤压板的左侧中部通过转动接头与螺杆转动连接,所述螺杆的左端贯穿挤压套管和快速回位装置固定安装有手轮,所述手轮的外侧转动安装有旋转把手,所述快速回位装置包括外壳,所述外壳的中部内腔中通过弹簧固定连接有上卡扣和下卡扣,所述下卡扣的两侧通过齿轮与直齿条活动连接,所述直齿条的上端固定连接有拉手。本发明结构简单,方便实用,有效的提高本装置的使用效果,同时采用快速回位装置,可以

一种水果分切包装台.pdf
本发明涉及一种包装台,尤其涉及一种水果分切包装台,包括带有行走轮的台架,设有台架上端前侧及左右两侧的边台,设于台架架面一侧的砧板及设于台架架面另一侧的废物收集口。由于在台架架面一侧设有砧板而台架架面另一侧设有废物收集口,可在水果分切处理过程中,将废物直接放入废物收集口,操作十分便捷,而且砧板及废物收集口处于一个平面,不会使果汁污染操作环境。
一种简单切水果机器.pdf
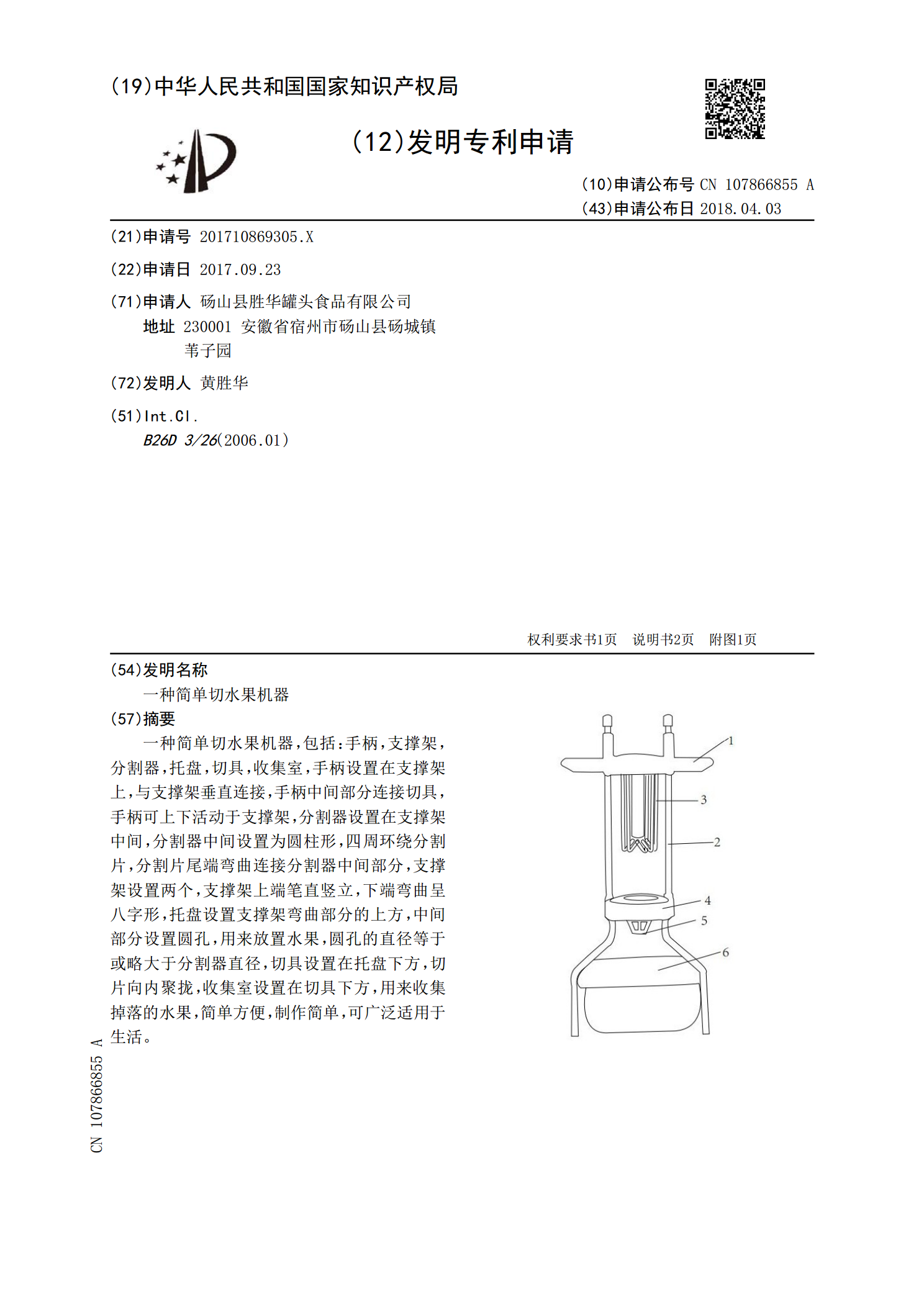
一种简单切水果机器,包括:手柄,支撑架,分割器,托盘,切具,收集室,手柄设置在支撑架上,与支撑架垂直连接,手柄中间部分连接切具,手柄可上下活动于支撑架,分割器设置在支撑架中间,分割器中间设置为圆柱形,四周环绕分割片,分割片尾端弯曲连接分割器中间部分,支撑架设置两个,支撑架上端笔直竖立,下端弯曲呈八字形,托盘设置支撑架弯曲部分的上方,中间部分设置圆孔,用来放置水果,圆孔的直径等于或略大于分割器直径,切具设置在托盘下方,切片向内聚拢,收集室设置在切具下方,用来收集掉落的水果,简单方便,制作简单,可广泛适用于生