
转轮、底盘装置和机器人.pdf

美丽****ka

1/9

2/9
3/9

4/9

5/9
6/9

7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
转轮、底盘装置和机器人.pdf
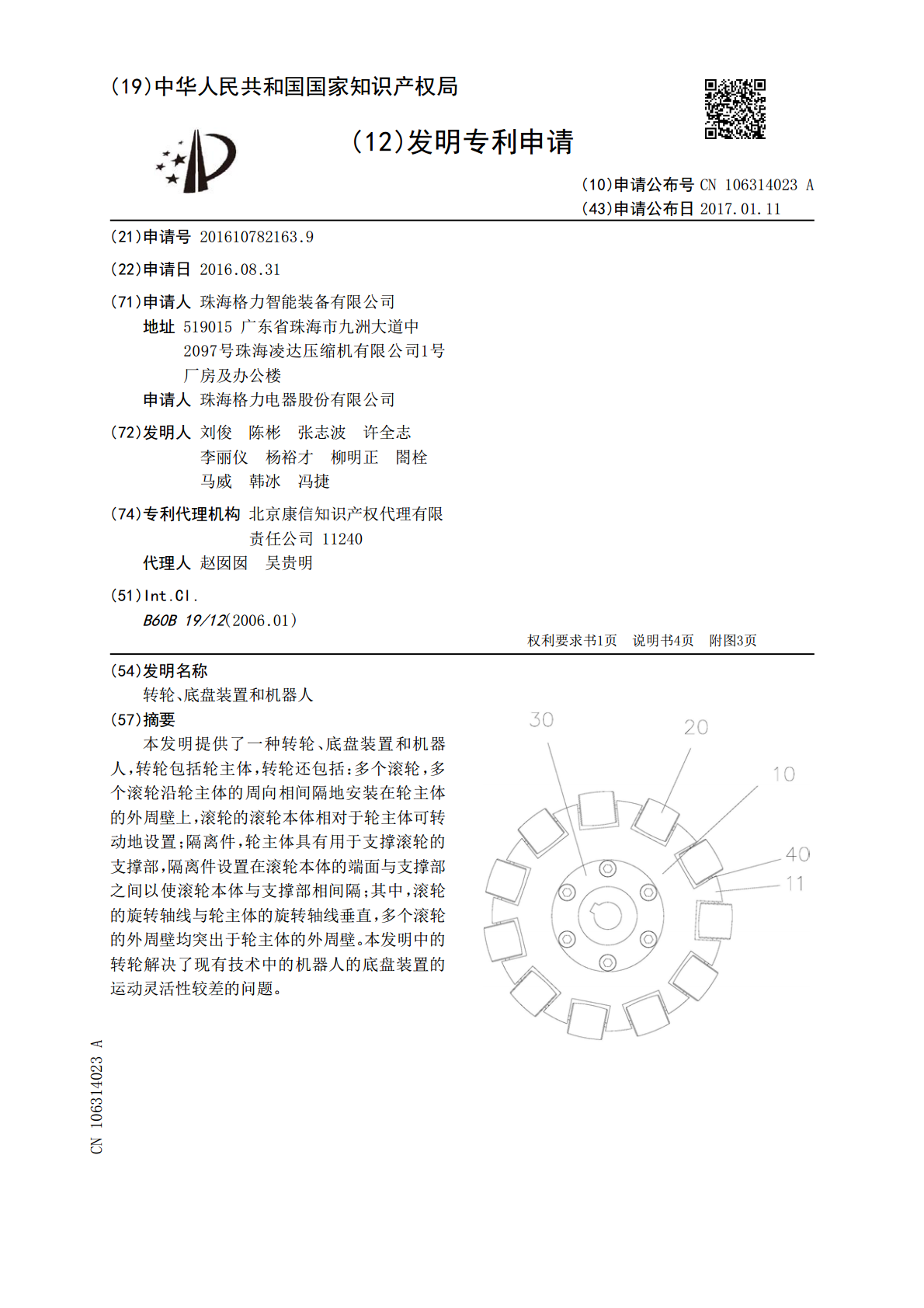
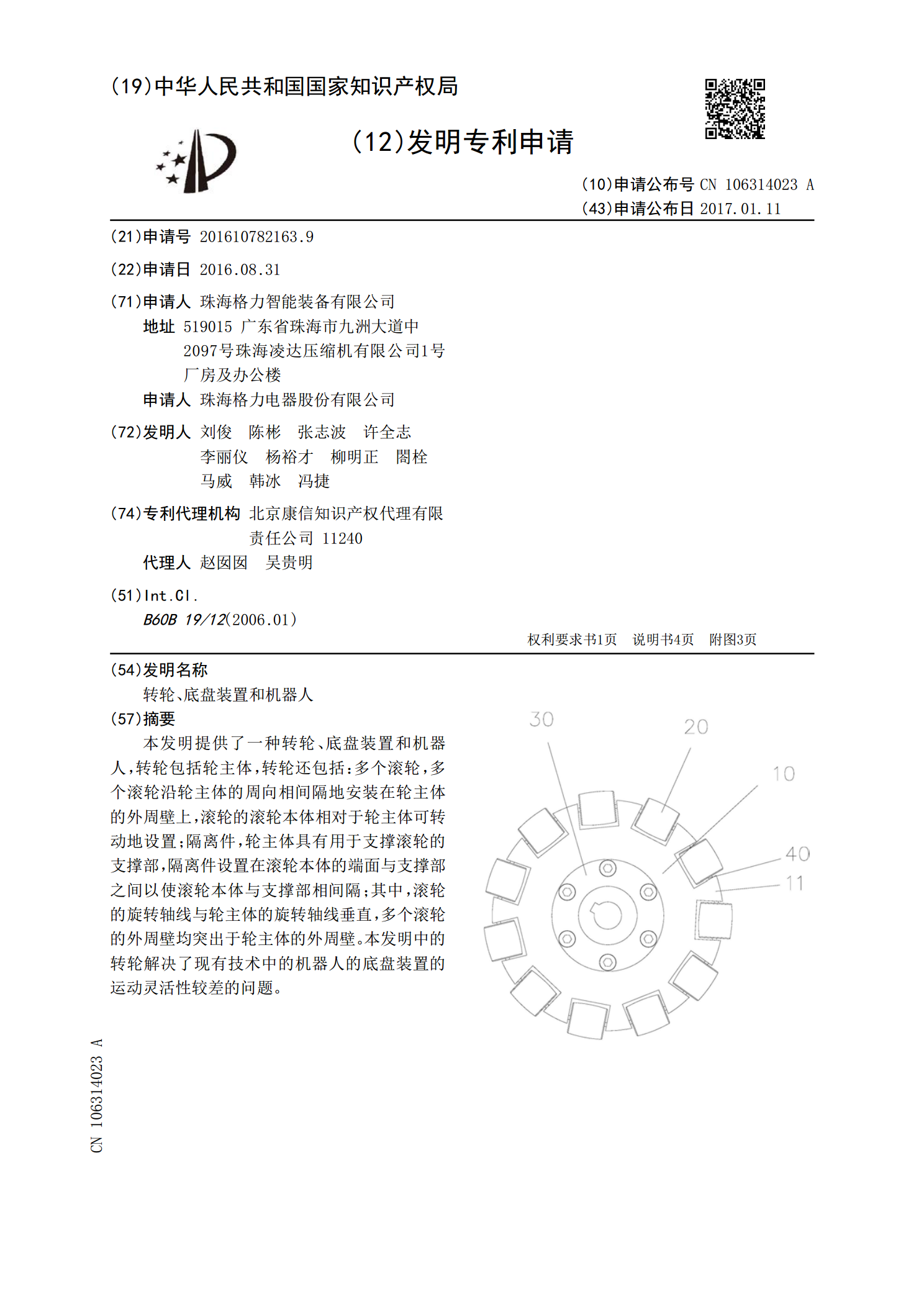
本发明提供了一种转轮、底盘装置和机器人,转轮包括轮主体,转轮还包括:多个滚轮,多个滚轮沿轮主体的周向相间隔地安装在轮主体的外周壁上,滚轮的滚轮本体相对于轮主体可转动地设置;隔离件,轮主体具有用于支撑滚轮的支撑部,隔离件设置在滚轮本体的端面与支撑部之间以使滚轮本体与支撑部相间隔;其中,滚轮的旋转轴线与轮主体的旋转轴线垂直,多个滚轮的外周壁均突出于轮主体的外周壁。本发明中的转轮解决了现有技术中的机器人的底盘装置的运动灵活性较差的问题。

转轮、底盘装置和机器人.pdf
本发明提供了一种转轮、底盘装置和机器人,转轮包括轮主体,转轮还包括:多个滚轮,多个滚轮沿轮主体的周向相间隔地安装在轮主体的外周壁上,滚轮的滚轮本体相对于轮主体可转动地设置;其中,轮主体具有用于支撑滚轮的支撑部,滚轮包括滚轴,滚轮本体可转动地在安装在滚轴上,滚轴为弧形杆,滚轴可拆卸地穿设在支撑部上;滚轮的旋转轴线与轮主体的旋转轴线垂直,多个滚轮的外周壁均突出于轮主体的外周壁。本发明中的转轮解决了现有技术中的机器人的底盘装置的运动灵活性较差的问题。
转轮、底盘装置和机器人.pdf
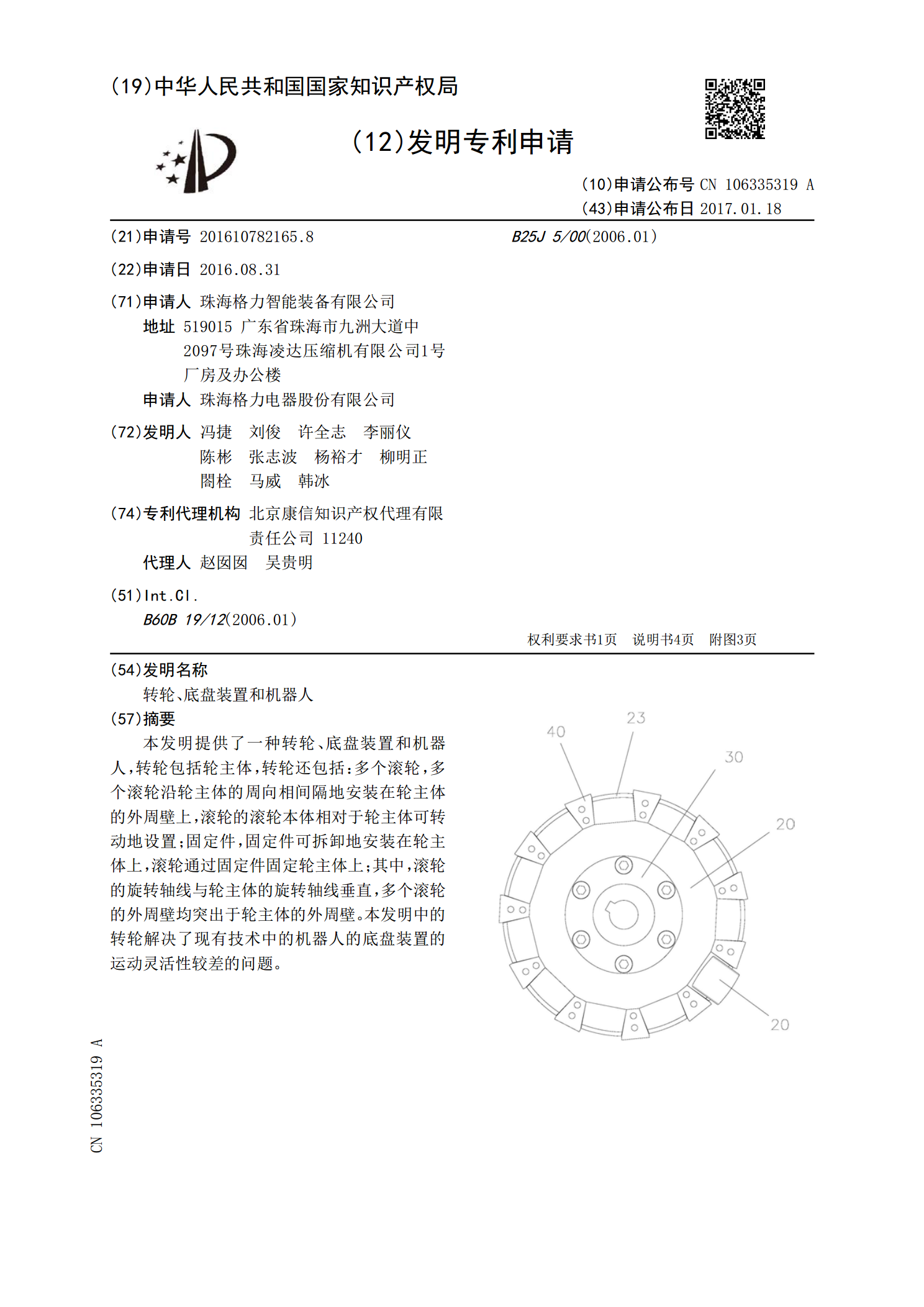
本发明提供了一种转轮、底盘装置和机器人,转轮包括轮主体,转轮还包括:多个滚轮,多个滚轮沿轮主体的周向相间隔地安装在轮主体的外周壁上,滚轮的滚轮本体相对于轮主体可转动地设置;固定件,固定件可拆卸地安装在轮主体上,滚轮通过固定件固定轮主体上;其中,滚轮的旋转轴线与轮主体的旋转轴线垂直,多个滚轮的外周壁均突出于轮主体的外周壁。本发明中的转轮解决了现有技术中的机器人的底盘装置的运动灵活性较差的问题。
转轮、底盘装置和机器人.pdf
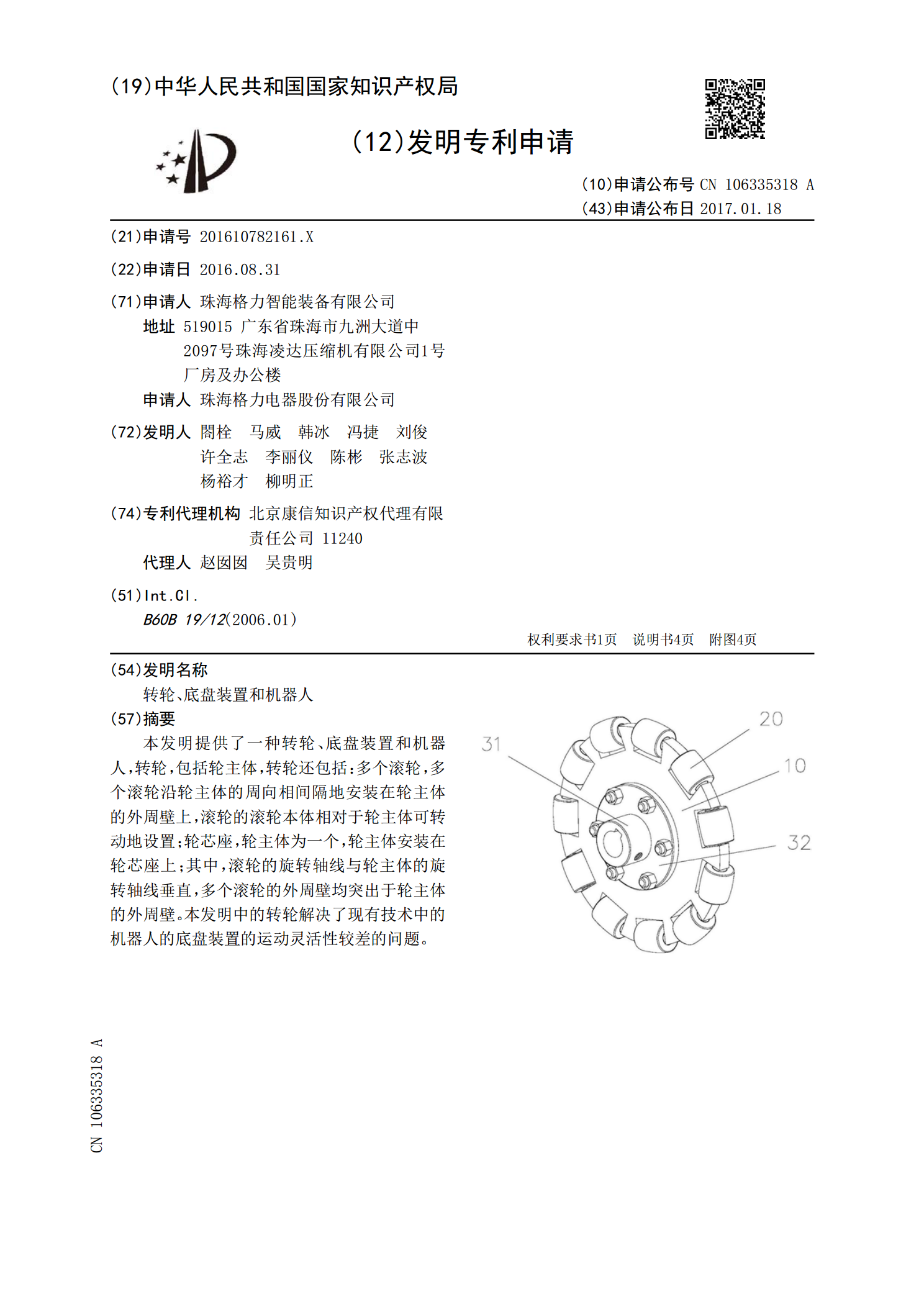
本发明提供了一种转轮、底盘装置和机器人,转轮,包括轮主体,转轮还包括:多个滚轮,多个滚轮沿轮主体的周向相间隔地安装在轮主体的外周壁上,滚轮的滚轮本体相对于轮主体可转动地设置;轮芯座,轮主体为一个,轮主体安装在轮芯座上;其中,滚轮的旋转轴线与轮主体的旋转轴线垂直,多个滚轮的外周壁均突出于轮主体的外周壁。本发明中的转轮解决了现有技术中的机器人的底盘装置的运动灵活性较差的问题。

转轮、底盘装置和机器人.pdf
本发明提供了一种转轮、底盘装置和机器人,转轮包括轮主体,转轮还包括:多个滚轮,多个滚轮沿轮主体的周向相间隔地安装在轮主体的外周壁上,滚轮的滚轮本体相对于轮主体可转动地设置;轮芯座,轮主体为至少三个,至少三个轮主体均安装在轮芯座上;其中,滚轮的旋转轴线与轮主体的旋转轴线垂直,多个滚轮的外周壁均突出于轮主体的外周壁。本发明中的转轮解决了现有技术中的机器人的底盘装置的运动灵活性较差的问题。