
一种超声波电机反步自适应伺服控制方法.pdf

美丽****ka


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种超声波电机反步自适应伺服控制方法.pdf
本发明涉及一种超声波电机反步自适应伺服控制方法,包括基座以及设置在基座上的超声波电机,将所述超声波电机的一侧输出轴与光电编码器相连接,将所述超声波电机的另一侧输出轴与飞轮惯性负载相连接,将所述飞轮惯性负载的输出轴经联轴器与力矩传感器相连接,所述光电编码器的信号输出端、所述力矩传感器的信号输出端均连接至控制系统;使用反步控制方法对系统进行伺服控制,系统的鲁棒控制器以反步为调整函数,用反步控制器来控制所述超声波电机的电机转子的旋转角度。本发明不仅控制准确度高,而且结构简单、紧凑,使用效果好。

一种改进的超声波电机反步自适应伺服控制方法.pdf
本发明涉及一种改进的超声波电机反步自适应伺服控制方法,包括以下步骤:步骤S1:提供一基座以及设于基座上的超声波电机,所述超声波电机一侧输出轴与光电编码器相连接,另一侧输出轴与飞轮惯性负载相连接,所述飞轮惯性负载的输出轴经联轴器与力矩传感器相连接,所述光电编码器的信号输出端、所述力矩传感器的信号输出端分别接至一控制系统;步骤S2:所述控制系统建立在反步控制的基础上,在反步自适应控制器以Lyapunov函数为其调整函数,用以获得更好的控制效能。该控制系统由反步控制器和电机组成,整个控制器的系统建立在反步计算的

一种基于反步的远程伺服电机跟踪控制方法.pdf
本发明涉及含有外界扰动的远程伺服电机系统模型建立以及远程伺服电机系统跟踪算法设计。本发明公开了一种考虑外界扰动的远程伺服电机系统建模以及远程伺服电机系统反步跟踪算法设计。其技术包括考虑外界扰动的远程伺服电机系统建模、外界扰动估计、类状态观测器设计、事件触发机制设计、反步跟踪控制器设计以及系统稳定性证明。本发明针对具有外界干扰的远程伺服电机系统,建立了具有死区非线性特性的齿轮传动系统模型,并对扰动进行估计。针对其系统特性,设计了一种基于事件触发机制的反步跟踪控制器,并对其控制的稳定性加以分析和证明。本发明能
一种超声波电机伺服控制系统轮廓控制方法.pdf
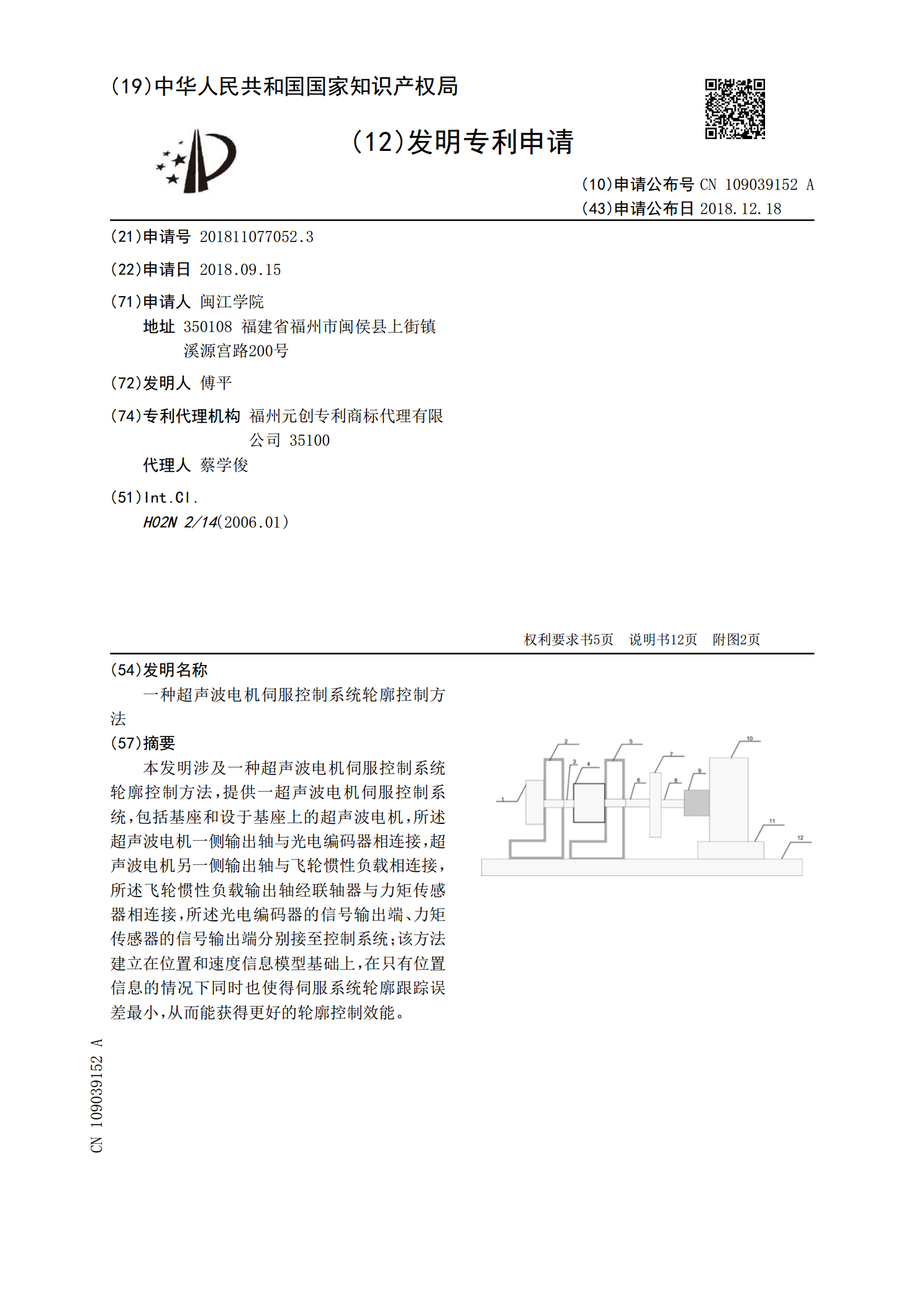
本发明涉及一种超声波电机伺服控制系统轮廓控制方法,提供一超声波电机伺服控制系统,包括基座和设于基座上的超声波电机,所述超声波电机一侧输出轴与光电编码器相连接,超声波电机另一侧输出轴与飞轮惯性负载相连接,所述飞轮惯性负载输出轴经联轴器与力矩传感器相连接,所述光电编码器的信号输出端、力矩传感器的信号输出端分别接至控制系统;该方法建立在位置和速度信息模型基础上,在只有位置信息的情况下同时也使得伺服系统轮廓跟踪误差最小,从而能获得更好的轮廓控制效能。

输入饱和条件下超声波电机伺服自适应控制系统及方法.pdf
发明涉及一种输入饱和条件下超声波电机伺服自适应控制系统及方法,该系统包括基座、设于基座上的用于固定超声波电机的超声波电机固定架,超声波电机一侧输出轴与光电编码器相连接,另一侧输出轴与飞轮惯性负载相连接;飞轮惯性负载的输出轴经联轴器与力矩传感器相连接;光电编码器的信号输出端、力矩传感器的信号输出端分别接至控制系统。该控制系统由反步控制器和电机组成,整个控制器的系统建立在反步计算的基础上,从而能获得更好的控制效能。本发明所提出的一种输入饱和条件下超声波电机伺服自适应控制系统及方法,不仅控制准确度高,而且结构简