
一种五轴联动数控机床伺服系统控制方法.pdf

小新****ou

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共29页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种五轴联动数控机床伺服系统控制方法.pdf
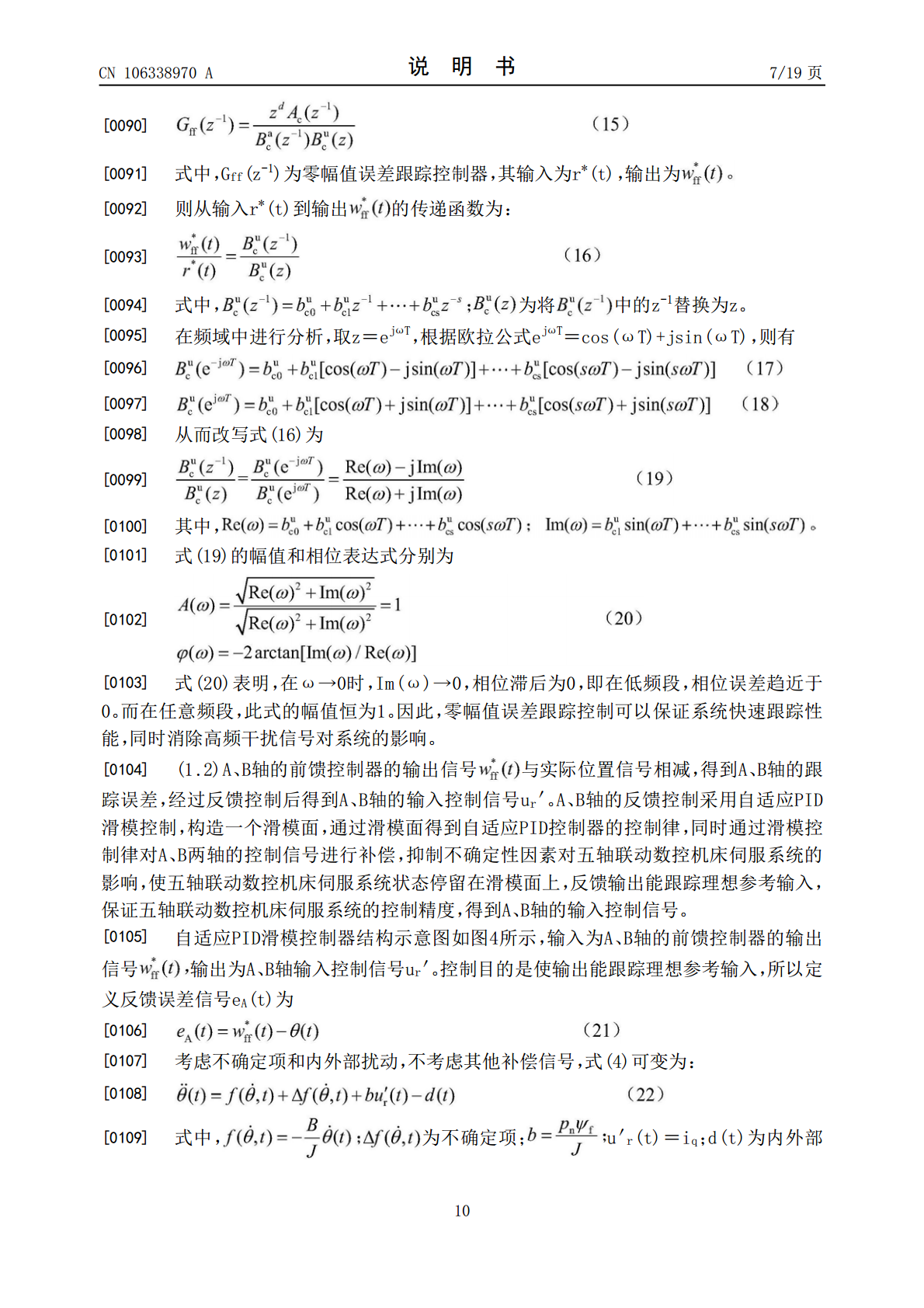
本发明提供一种五轴联动数控机床伺服系统控制方法,包括:五轴联动数控机床伺服系统获得五个进给轴的理想位置信号;五个进给轴的理想位置信号经过前馈控制和反馈控制后,分别获得各进给轴的输入控制信号;计算A、B轴误差补偿控制信号,以及X、Y、Z轴的两组误差补偿控制信号;计算得到A、B轴的控制信号和X、Y、Z轴的控制信号;利用计算得到的A、B轴的控制信号以及X、Y、Z轴的控制信号进行五轴联动数控机床伺服系统控制,输出实际位置信号。本发明把单轴系统的反馈控制、前馈控制以及多轴的交叉耦合控制、旋转运动对直线运动的干扰补偿
一种五轴联动数控机床.pdf
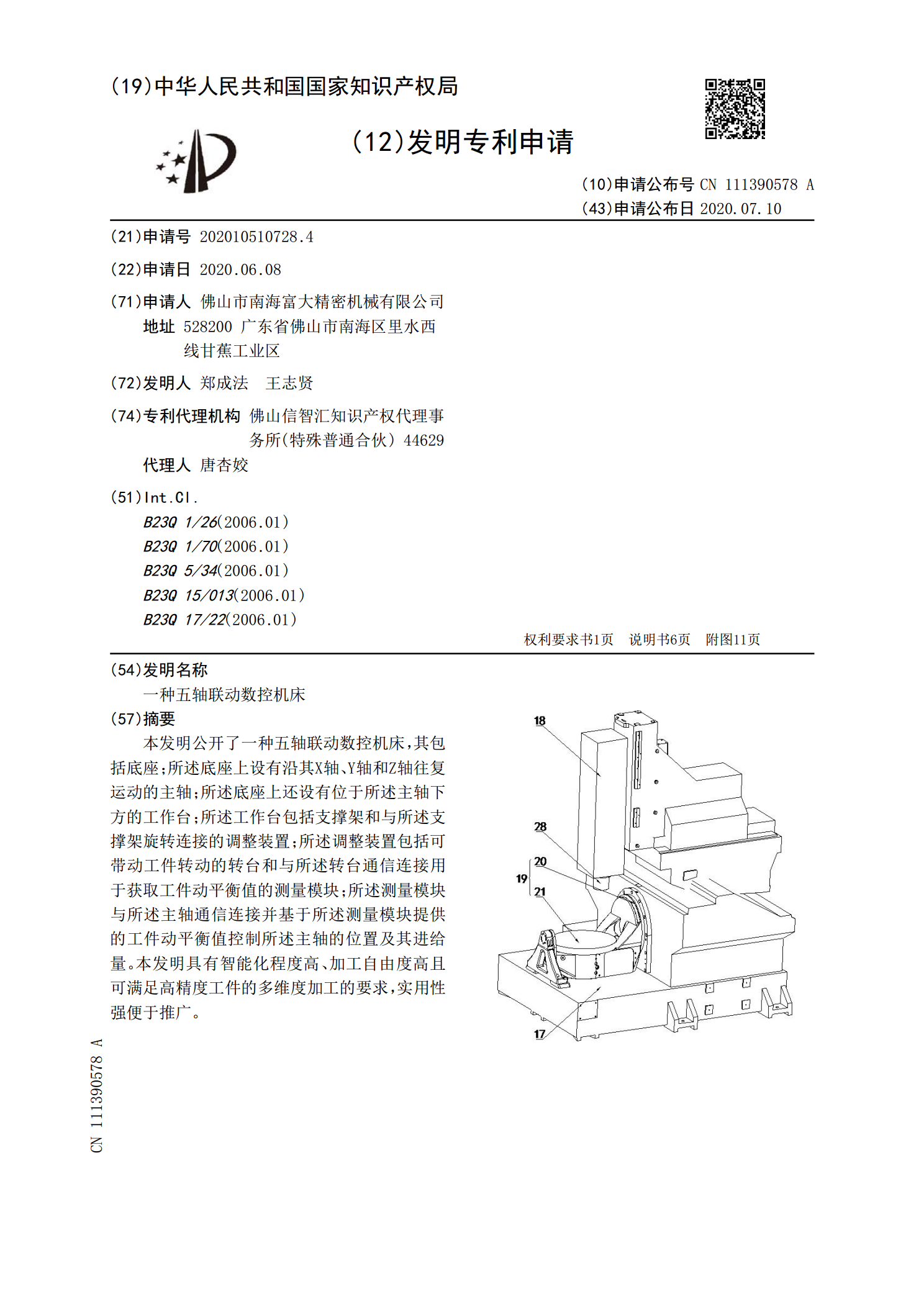
本发明公开了一种五轴联动数控机床,其包括底座;所述底座上设有沿其X轴、Y轴和Z轴往复运动的主轴;所述底座上还设有位于所述主轴下方的工作台;所述工作台包括支撑架和与所述支撑架旋转连接的调整装置;所述调整装置包括可带动工件转动的转台和与所述转台通信连接用于获取工件动平衡值的测量模块;所述测量模块与所述主轴通信连接并基于所述测量模块提供的工件动平衡值控制所述主轴的位置及其进给量。本发明具有智能化程度高、加工自由度高且可满足高精度工件的多维度加工的要求,实用性强便于推广。
五轴联动数控机床.ppt
五轴联动数控机床五轴联动所谓五轴加工这里是指在一台机床上至少有五个坐标轴(三个直线坐标和两个旋转坐标),而且可在计算机数控(CNC)系统的控制下同时协调运动进行加工。1:对于五轴立式加工来说,必须要有C轴,即旋转工作台,然后再加上一个轴,要么是A轴要么是B轴。!所谓五轴加工这里是指在一台机床上至少有五个坐标轴(三个直线坐标和两个旋转坐标),而且可在计算机数控(CNC)系统的控制下同时协调运动进行加工。五轴机床类型主轴头旋转类型工作台挠X轴旋转工作台挠Z轴旋转主轴无需摆动复合型整体结构沿3个直线轴的运动分别
五轴联动数控机床.ppt
五轴联动数控机床五轴联动所谓五轴加工这里是指在一台机床上至少有五个坐标轴(三个直线坐标和两个旋转坐标),而且可在计算机数控(CNC)系统的控制下同时协调运动进行加工。1:对于五轴立式加工来说,必须要有C轴,即旋转工作台,然后再加上一个轴,要么是A轴要么是B轴。!所谓五轴加工这里是指在一台机床上至少有五个坐标轴(三个直线坐标和两个旋转坐标),而且可在计算机数控(CNC)系统的控制下同时协调运动进行加工。五轴机床类型主轴头旋转类型工作台挠X轴旋转工作台挠Z轴旋转主轴无需摆动复合型整体结构沿3个直线轴的运动分别
五轴联动数控机床.pdf
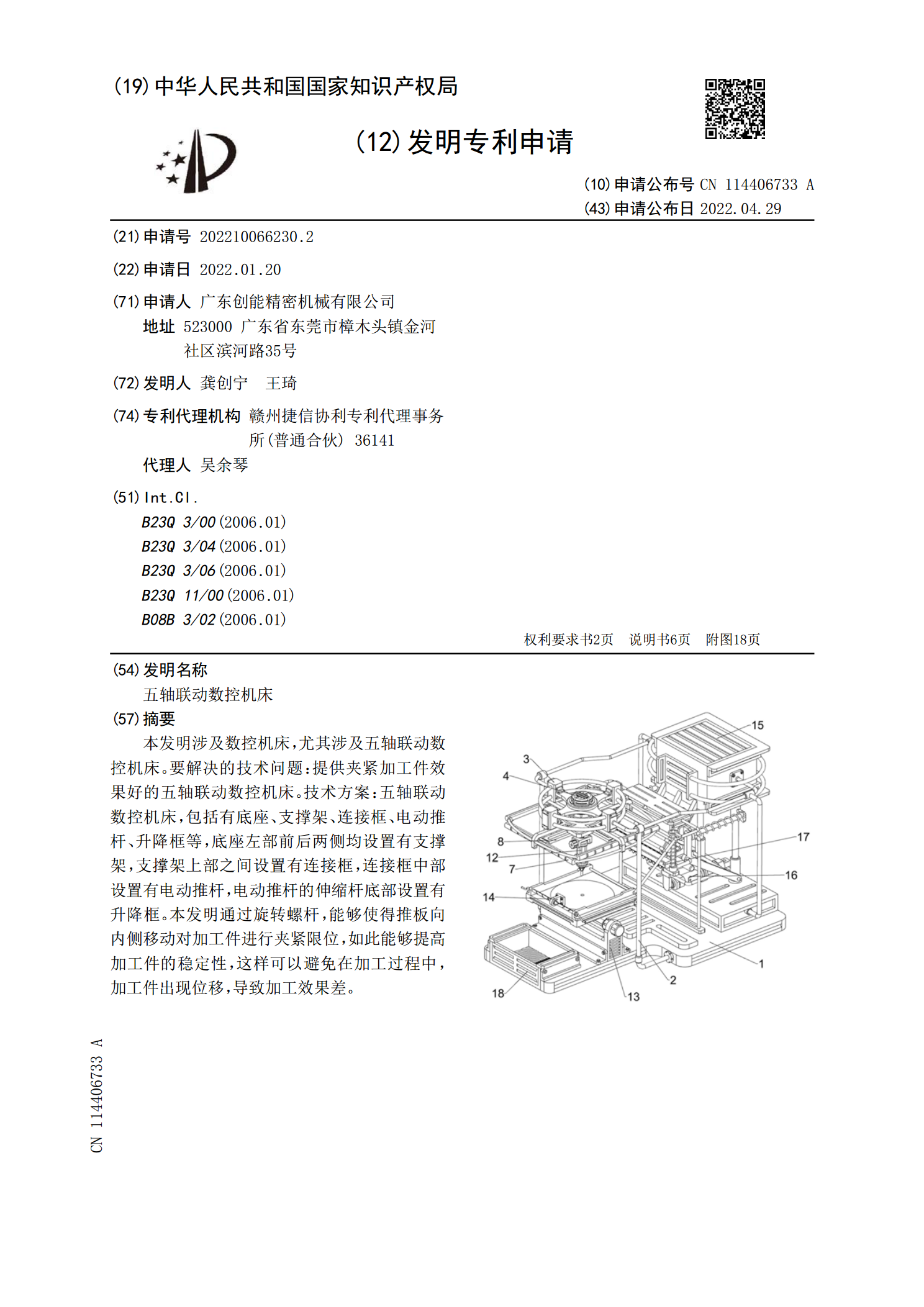
本发明涉及数控机床,尤其涉及五轴联动数控机床。要解决的技术问题:提供夹紧加工件效果好的五轴联动数控机床。技术方案:五轴联动数控机床,包括有底座、支撑架、连接框、电动推杆、升降框等,底座左部前后两侧均设置有支撑架,支撑架上部之间设置有连接框,连接框中部设置有电动推杆,电动推杆的伸缩杆底部设置有升降框。本发明通过旋转螺杆,能够使得推板向内侧移动对加工件进行夹紧限位,如此能够提高加工件的稳定性,这样可以避免在加工过程中,加工件出现位移,导致加工效果差。