
一种吹瓶机开合机械手.pdf

沛芹****ng


1/9
2/9
3/9
4/9

5/9

6/9
7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种吹瓶机开合机械手.pdf
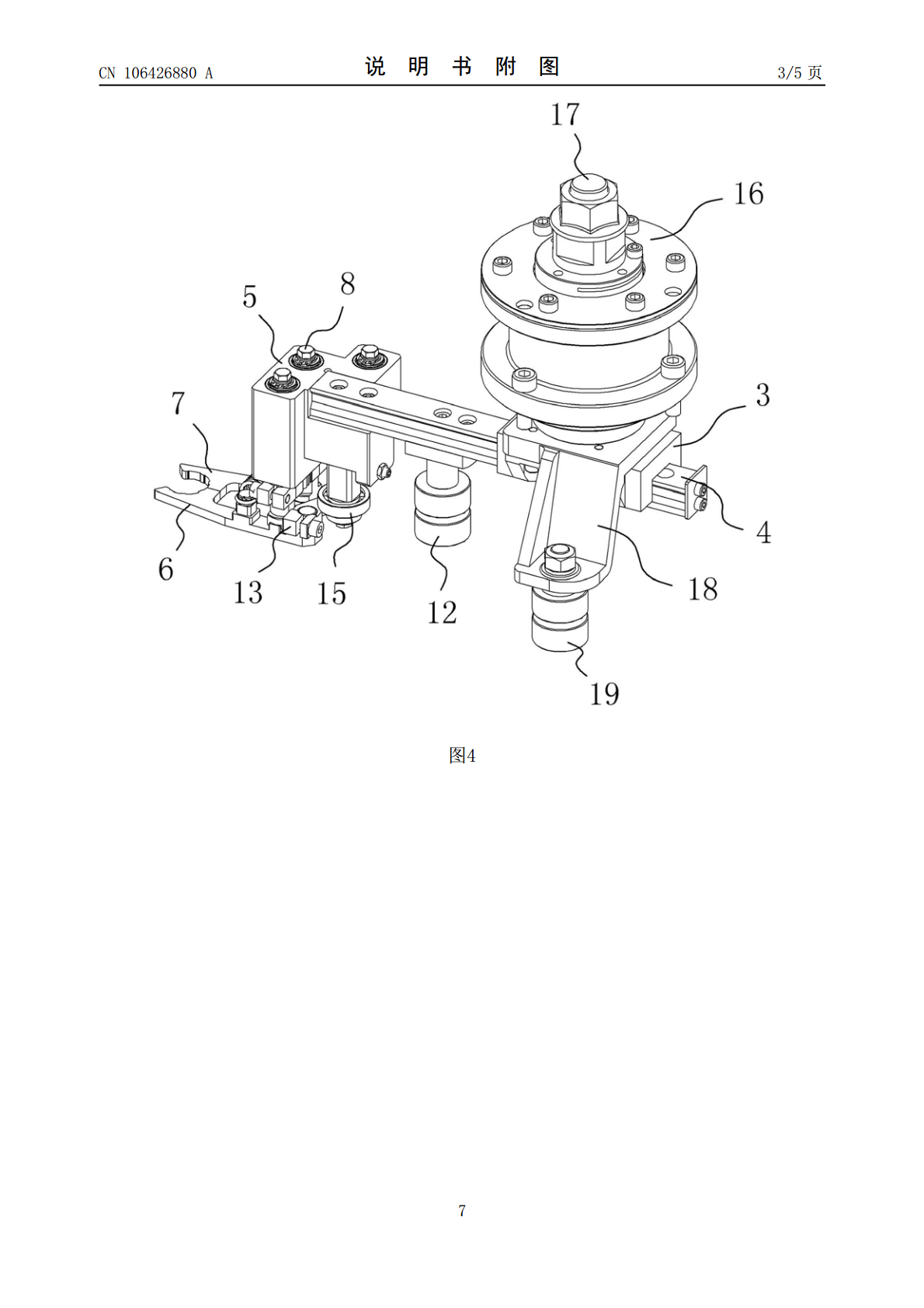
一种吹瓶机开合机械手,包括绕轴线旋转的支撑盘和凸轮盘,凸轮盘上设有伸缩凸轮和开合凸轮,支撑盘上装有带可移动滑轨的滑块,滑轨通过伸缩导轮与伸缩凸轮的作用而伸向瓶胚,同时,滑轨末端连接板上的开合臂通过开合导轮与开合凸轮的作用而驱动第一夹手张开,第一夹手与第二夹手之间又通过齿轮板相互驱动而同时张开。该吹瓶机开合机械手实现了夹手的主动张开,从而避免传统被动张开方式中夹手对瓶胚的伤害和对夹手的精度要求,进而有效地保护了瓶胚,并提高了产品的质量和合格率,同时降低了夹手的加工要求。
一种吹瓶机的开合模装置.pdf
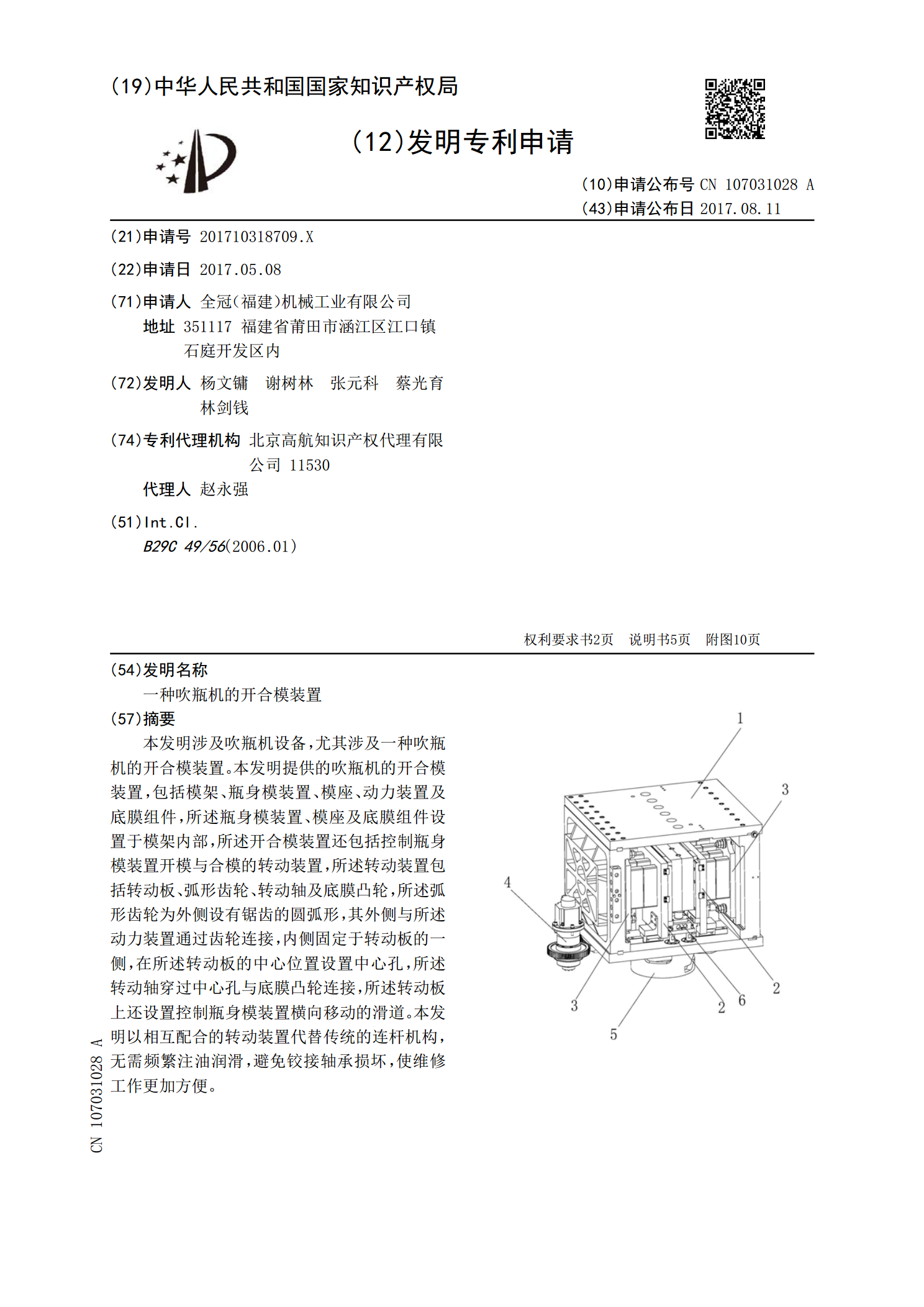
本发明涉及吹瓶机设备,尤其涉及一种吹瓶机的开合模装置。本发明提供的吹瓶机的开合模装置,包括模架、瓶身模装置、模座、动力装置及底膜组件,所述瓶身模装置、模座及底膜组件设置于模架内部,所述开合模装置还包括控制瓶身模装置开模与合模的转动装置,所述转动装置包括转动板、弧形齿轮、转动轴及底膜凸轮,所述弧形齿轮为外侧设有锯齿的圆弧形,其外侧与所述动力装置通过齿轮连接,内侧固定于转动板的一侧,在所述转动板的中心位置设置中心孔,所述转动轴穿过中心孔与底膜凸轮连接,所述转动板上还设置控制瓶身模装置横向移动的滑道。本发明以相
一种吹瓶机的成型开合模装置.pdf
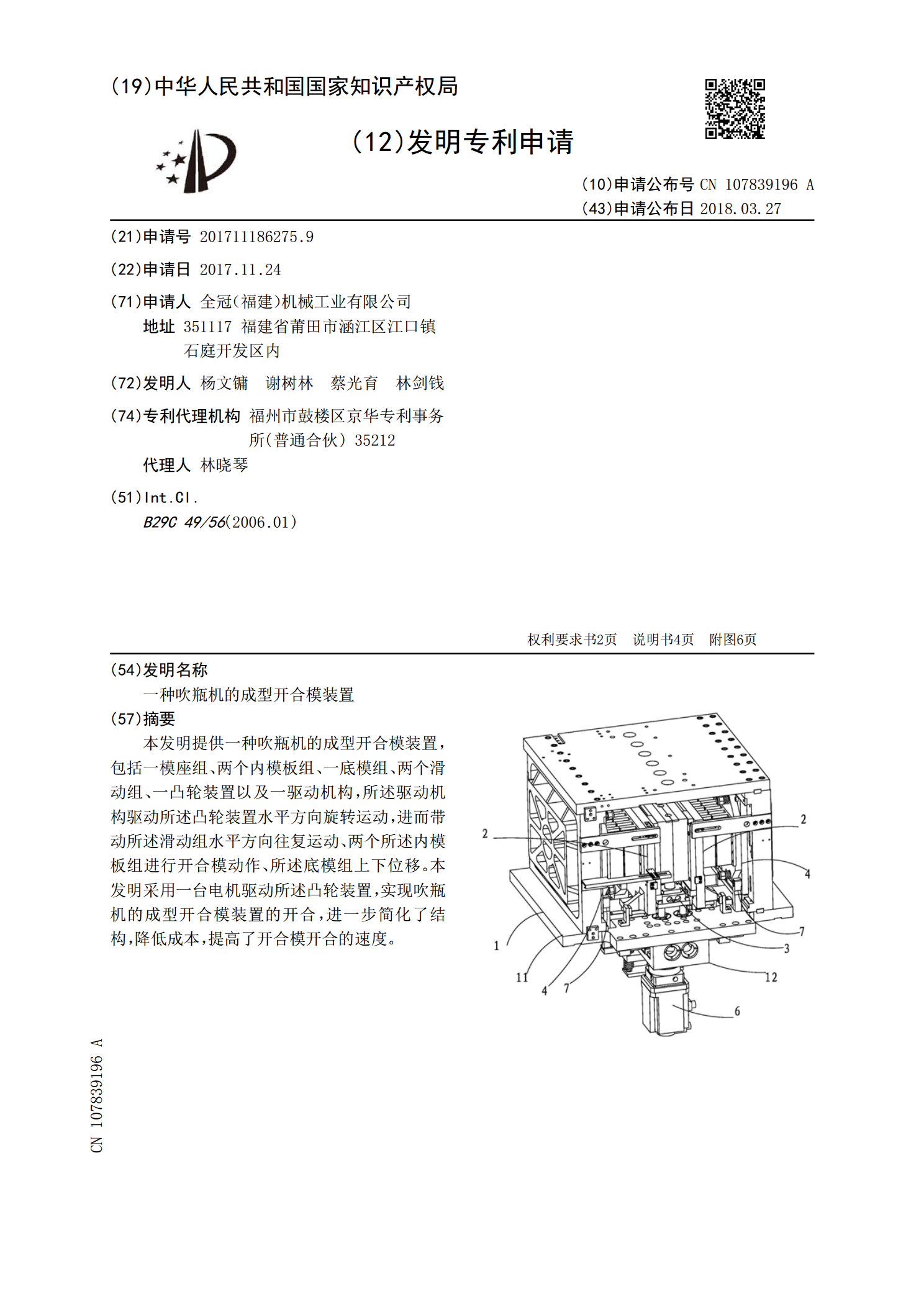
本发明提供一种吹瓶机的成型开合模装置,包括一模座组、两个内模板组、一底模组、两个滑动组、一凸轮装置以及一驱动机构,所述驱动机构驱动所述凸轮装置水平方向旋转运动,进而带动所述滑动组水平方向往复运动、两个所述内模板组进行开合模动作、所述底模组上下位移。本发明采用一台电机驱动所述凸轮装置,实现吹瓶机的成型开合模装置的开合,进一步简化了结构,降低成本,提高了开合模开合的速度。
一种伺服开合模高效节能吹瓶机.pdf
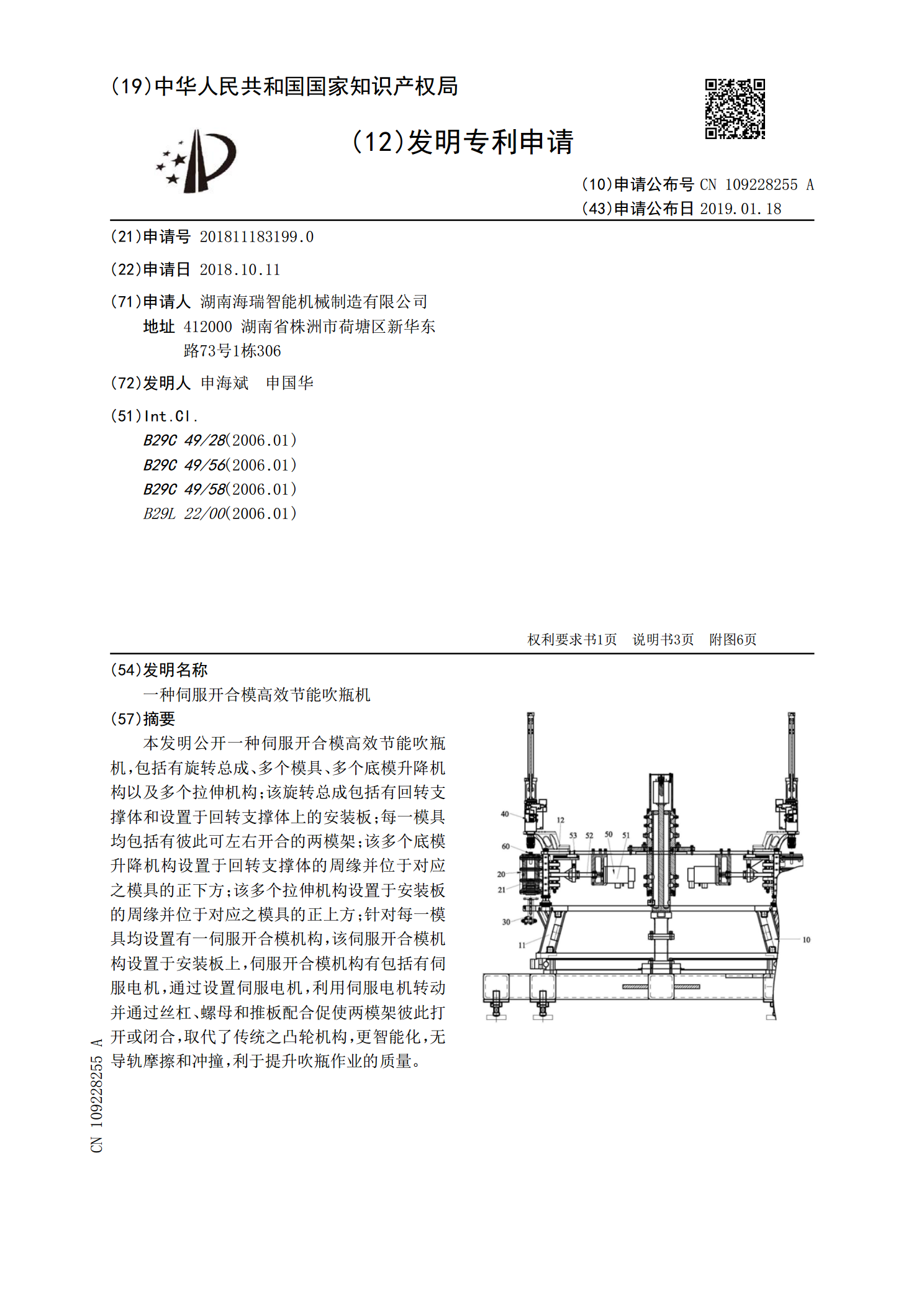
本发明公开一种伺服开合模高效节能吹瓶机,包括有旋转总成、多个模具、多个底模升降机构以及多个拉伸机构;该旋转总成包括有回转支撑体和设置于回转支撑体上的安装板;每一模具均包括有彼此可左右开合的两模架;该多个底模升降机构设置于回转支撑体的周缘并位于对应之模具的正下方;该多个拉伸机构设置于安装板的周缘并位于对应之模具的正上方;针对每一模具均设置有一伺服开合模机构,该伺服开合模机构设置于安装板上,伺服开合模机构有包括有伺服电机,通过设置伺服电机,利用伺服电机转动并通过丝杠、螺母和推板配合促使两模架彼此打开或闭合,取
一种吹瓶机的单伺服驱动开合模装置.pdf
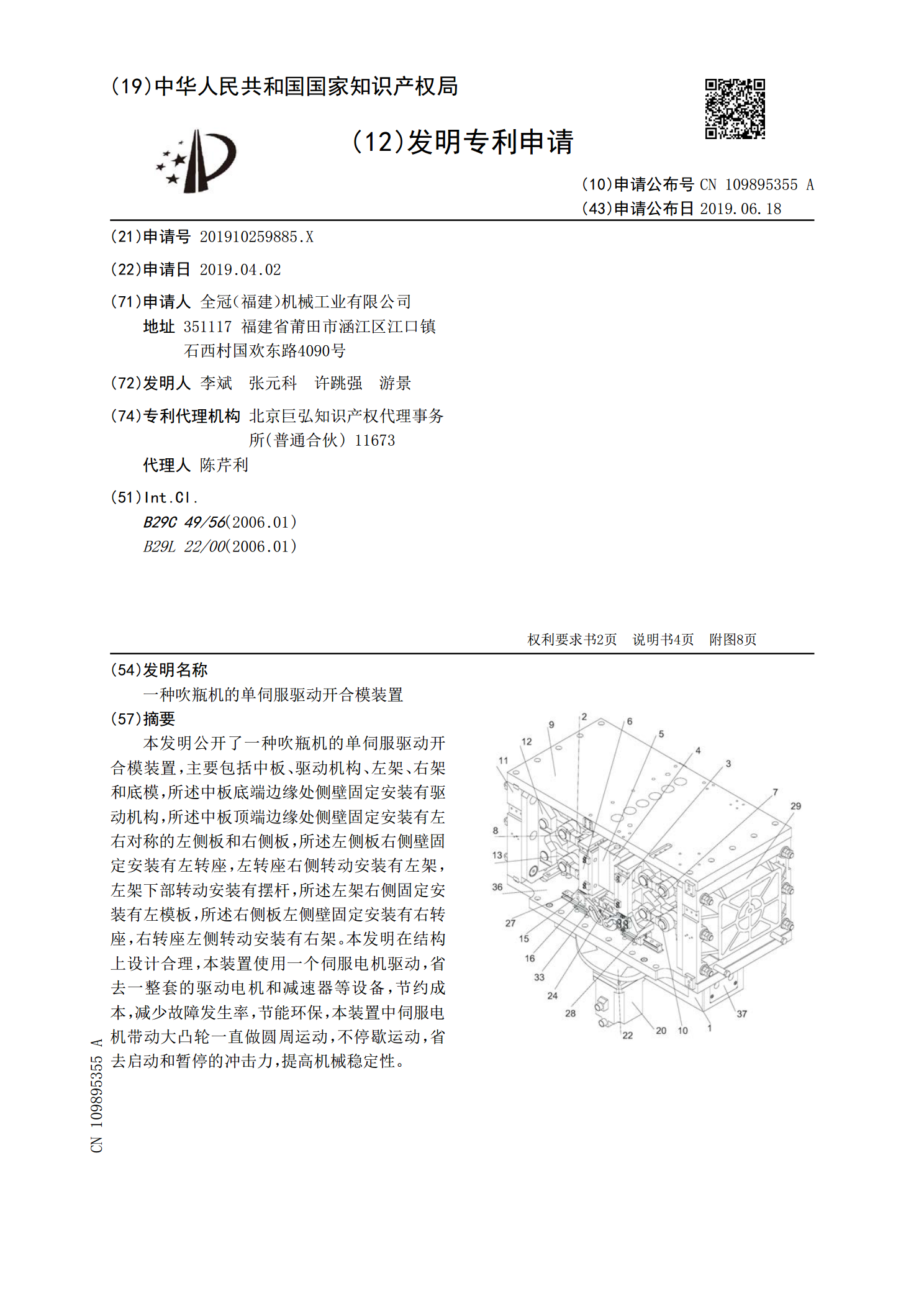
本发明公开了一种吹瓶机的单伺服驱动开合模装置,主要包括中板、驱动机构、左架、右架和底模,所述中板底端边缘处侧壁固定安装有驱动机构,所述中板顶端边缘处侧壁固定安装有左右对称的左侧板和右侧板,所述左侧板右侧壁固定安装有左转座,左转座右侧转动安装有左架,左架下部转动安装有摆杆,所述左架右侧固定安装有左模板,所述右侧板左侧壁固定安装有右转座,右转座左侧转动安装有右架。本发明在结构上设计合理,本装置使用一个伺服电机驱动,省去一整套的驱动电机和减速器等设备,节约成本,减少故障发生率,节能环保,本装置中伺服电机带动大凸