
一种无人机前起落架.pdf

一只****呀盟

1/10

2/10

3/10
4/10
5/10

6/10

7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种无人机前起落架.pdf
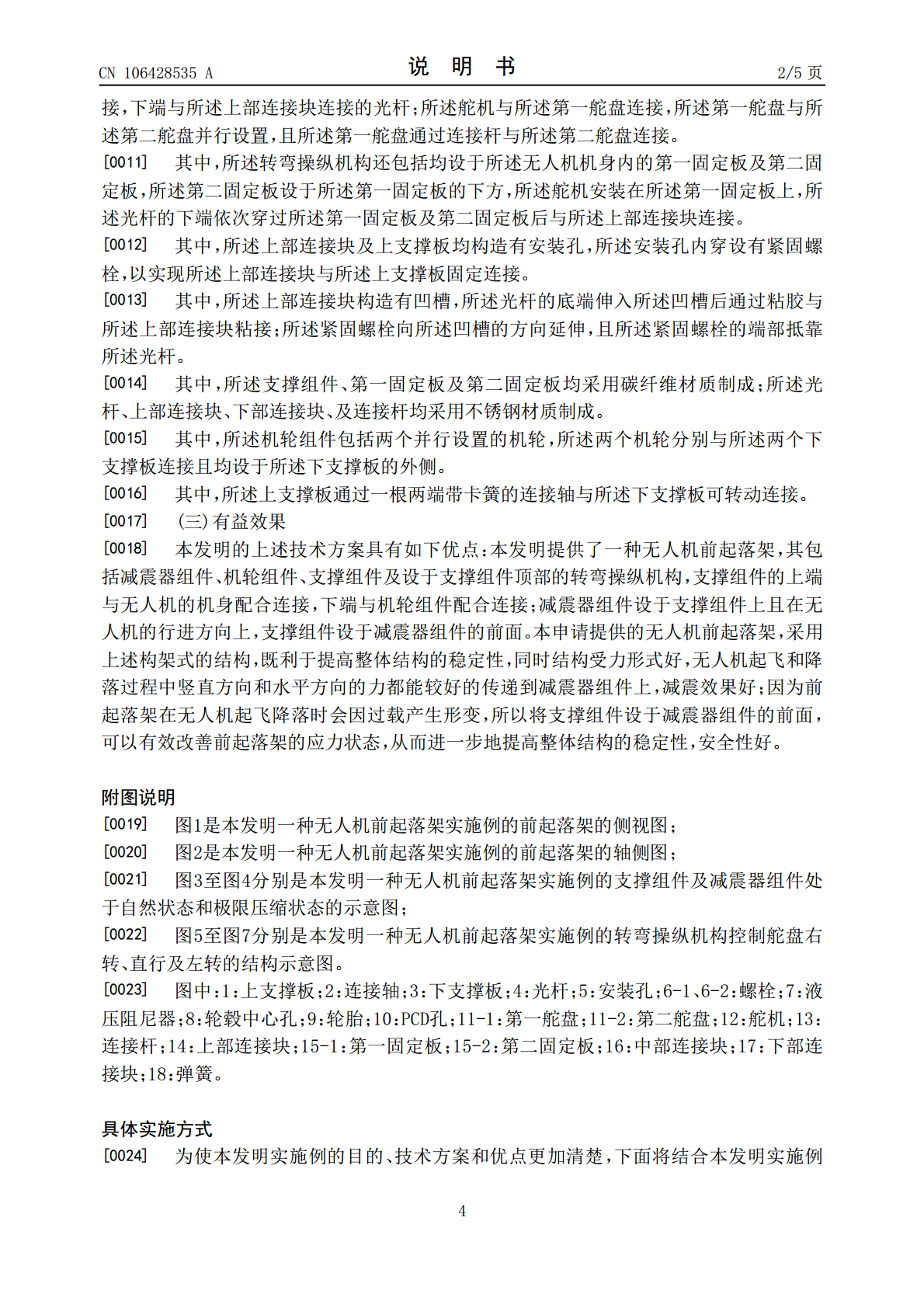
本发明涉及无人飞行器滑跑起降装置技术领域,尤其涉及一种无人机前起落架。本发明提供了一种无人机前起落架,包括减震器组件、机轮组件、支撑组件及设于支撑组件顶部的转弯操纵机构,支撑组件的上端与无人机的机身连接,下端与机轮组件连接;减震器组件设于支撑组件上且在无人机的行进方向上,支撑组件设于减震器组件的前面。本申请采用上述构架式的结构,既利于提高整体结构的稳定性,同时结构受力形式好,无人机起飞和降落过程中的力都能较好的传递到减震器组件上,减震效果好;此外,因前起落架在无人机起飞降落时会因过载产生形变,故将支撑组件
无人机前起落架.pdf
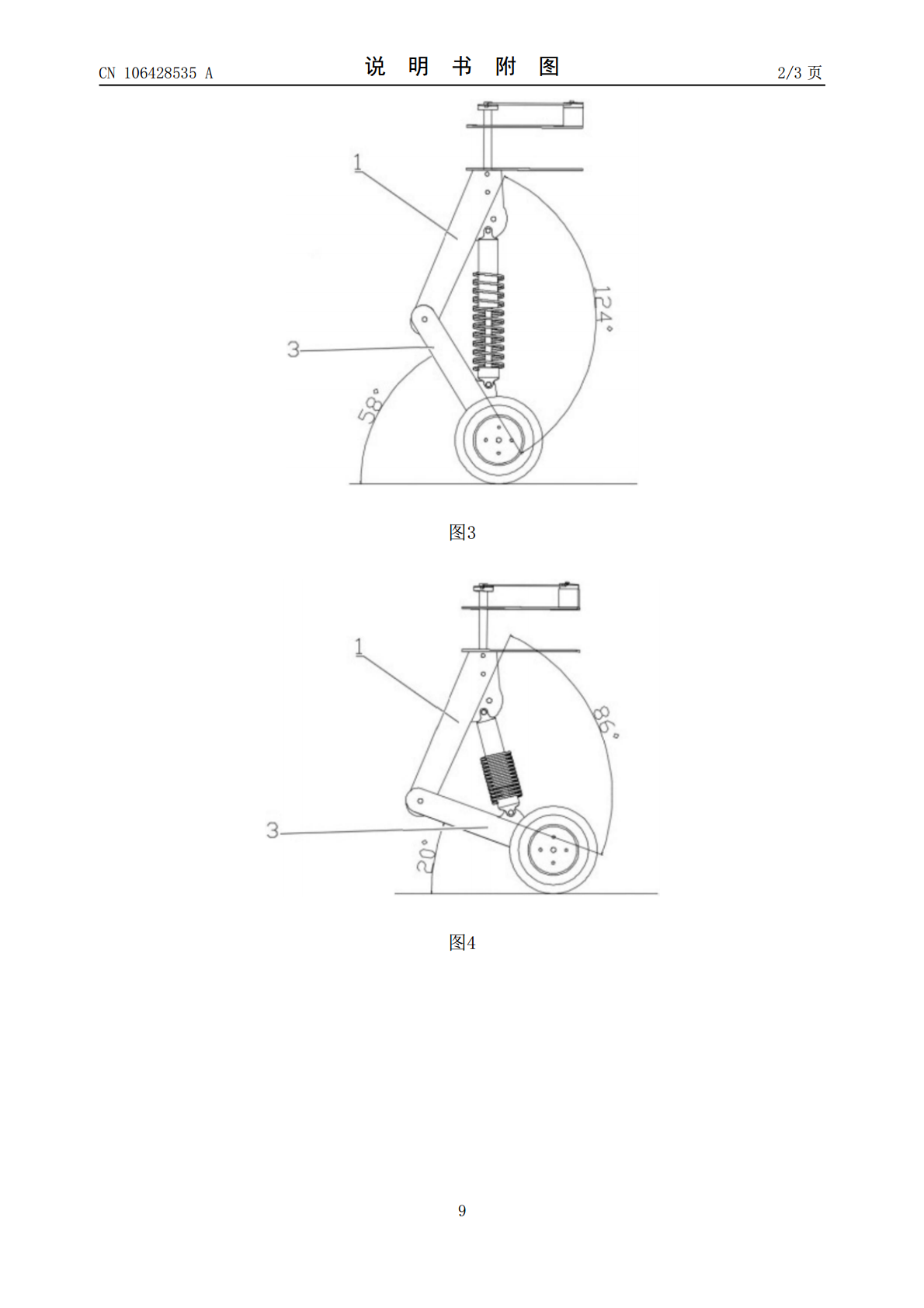
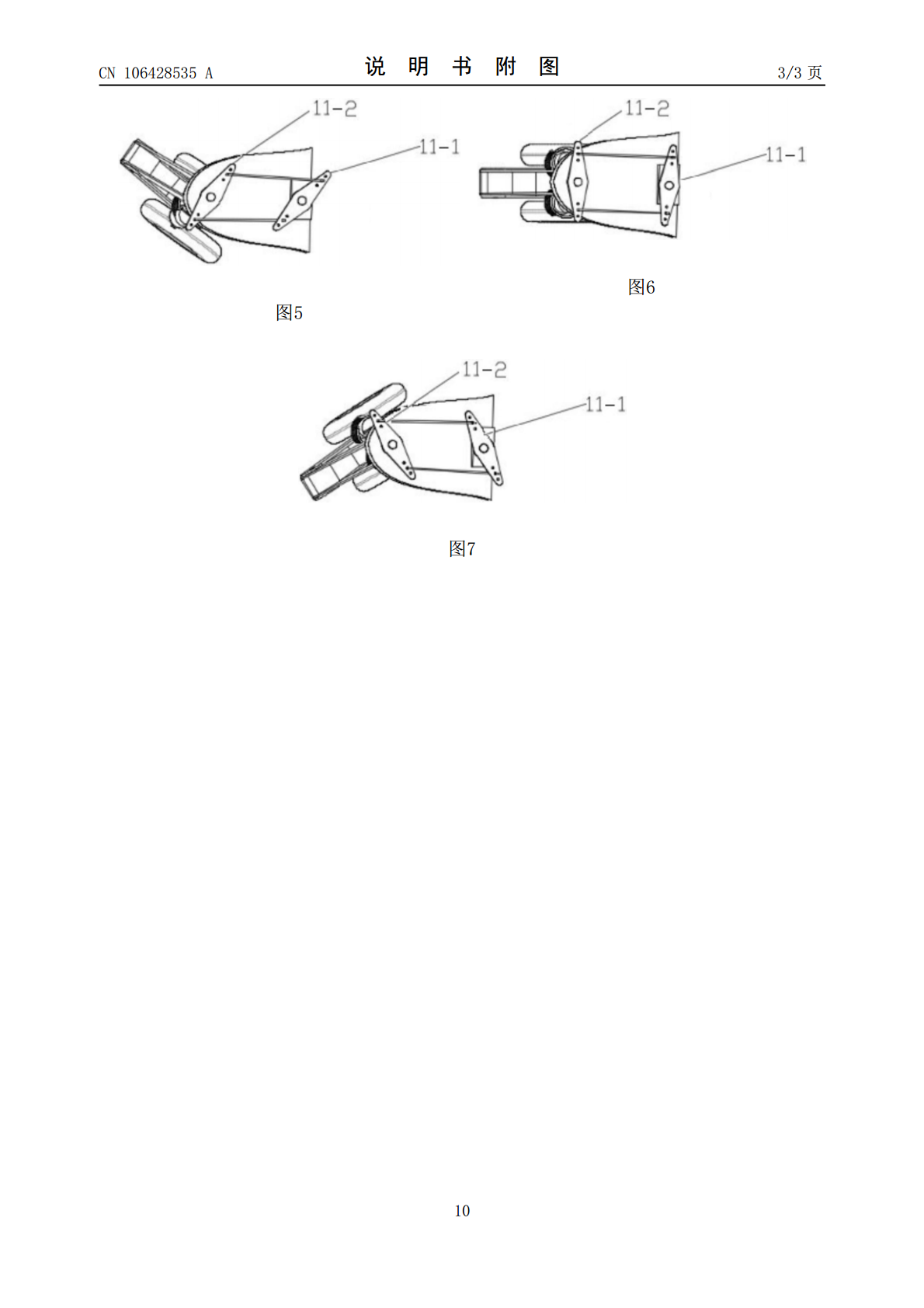
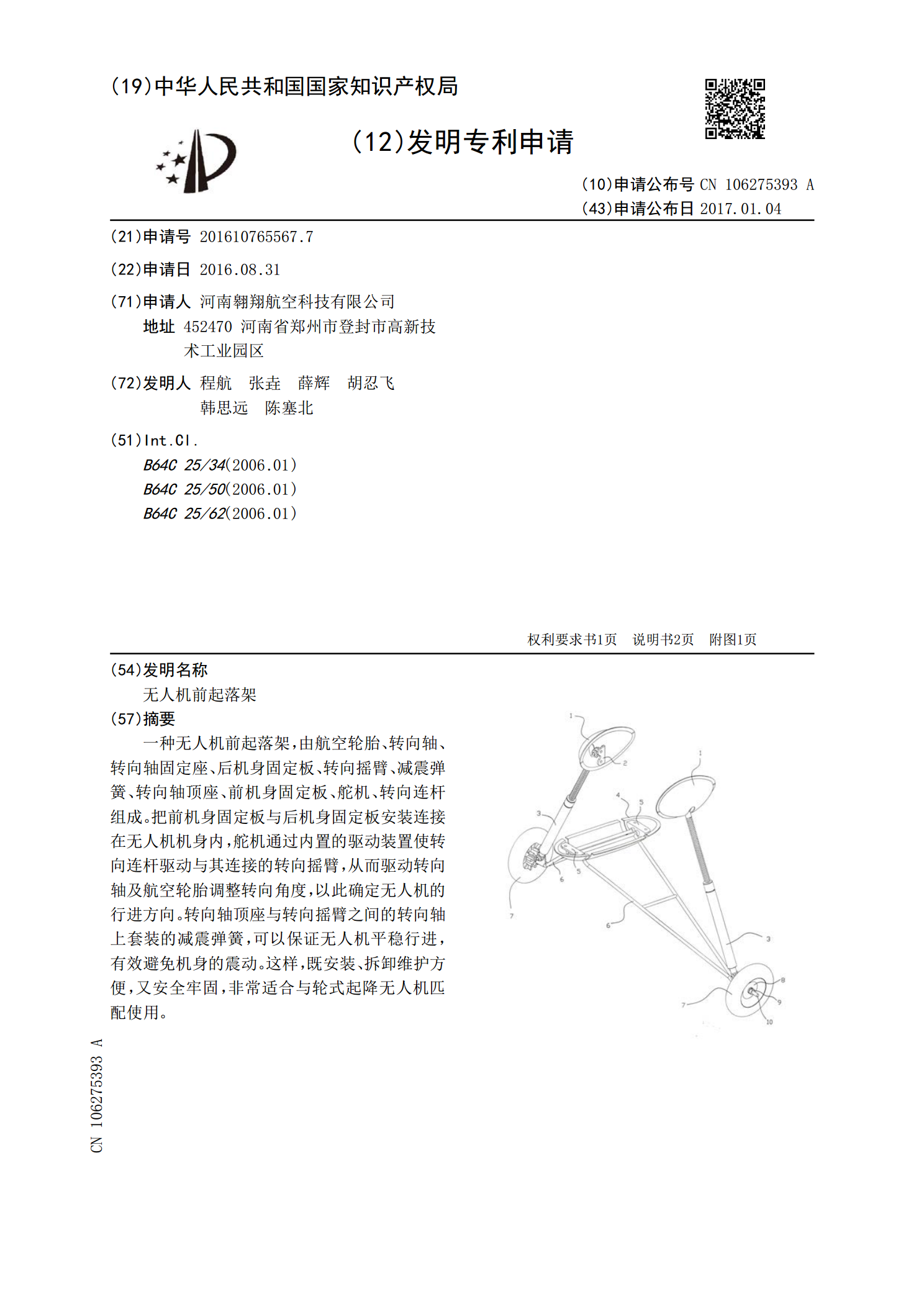
一种无人机前起落架,由航空轮胎、转向轴、转向轴固定座、后机身固定板、转向摇臂、减震弹簧、转向轴顶座、前机身固定板、舵机、转向连杆组成。把前机身固定板与后机身固定板安装连接在无人机机身内,舵机通过内置的驱动装置使转向连杆驱动与其连接的转向摇臂,从而驱动转向轴及航空轮胎调整转向角度,以此确定无人机的行进方向。转向轴顶座与转向摇臂之间的转向轴上套装的减震弹簧,可以保证无人机平稳行进,有效避免机身的震动。这样,既安装、拆卸维护方便,又安全牢固,非常适合与轮式起降无人机匹配使用。

无人机前起落架.pdf
一种无人机前起落架,由航空轮胎、转向轴、转向轴固定座、后机身固定板、转向摇臂、减震弹簧、转向轴顶座、前机身固定板、舵机、转向连杆组成。把前机身固定板与后机身固定板安装连接在无人机机身内,舵机通过内置的驱动装置使转向连杆驱动与其连接的转向摇臂,从而驱动转向轴及航空轮胎调整转向角度,以此确定无人机的行进方向。转向轴顶座与转向摇臂之间的转向轴上套装的减震弹簧,可以保证无人机平稳行进,有效避免机身的震动。这样,既安装、拆卸维护方便,又安全牢固,非常适合与轮式起降无人机匹配使用。
一种小型无人机支柱式弹簧前起落架.pdf
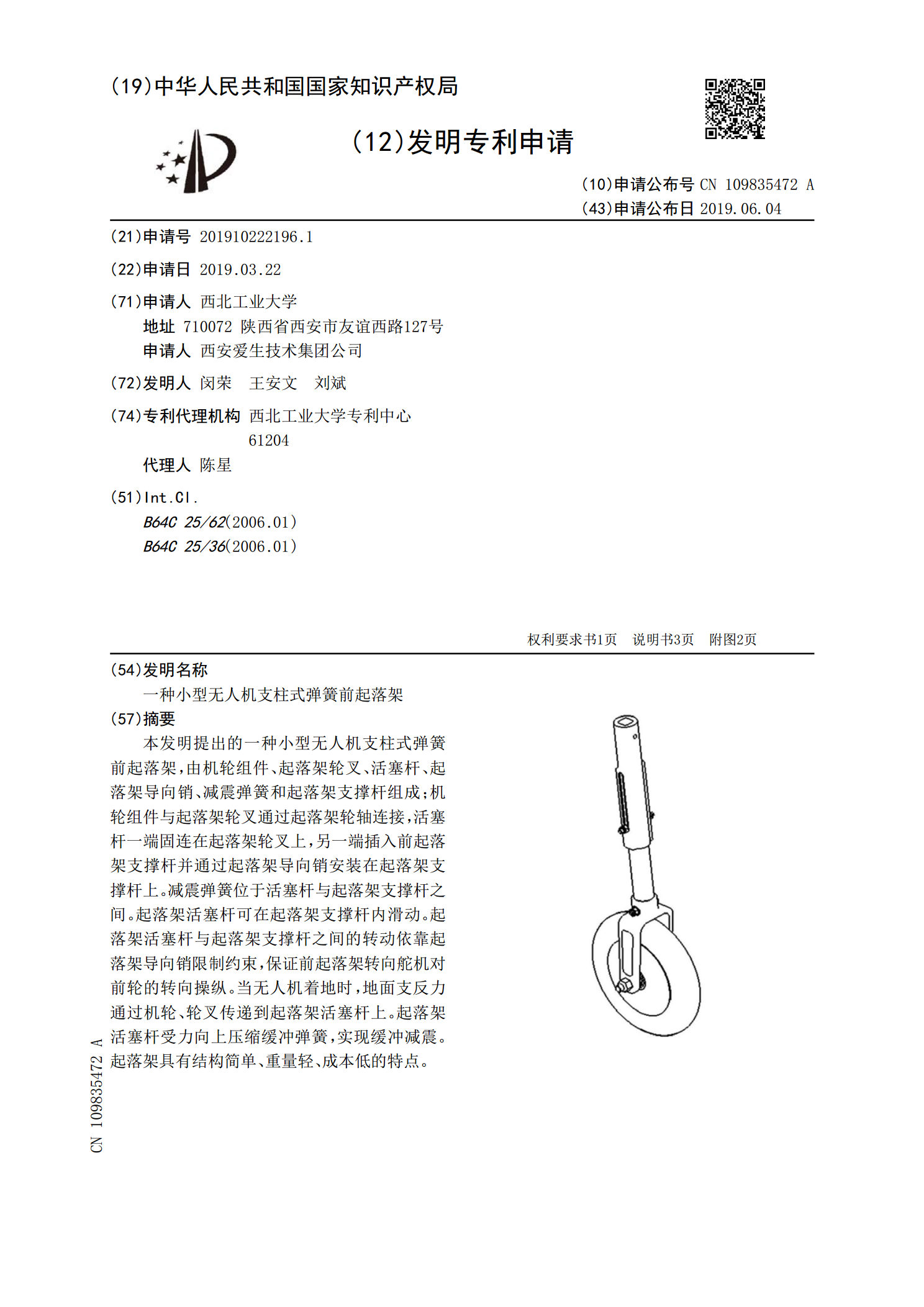
本发明提出的一种小型无人机支柱式弹簧前起落架,由机轮组件、起落架轮叉、活塞杆、起落架导向销、减震弹簧和起落架支撑杆组成;机轮组件与起落架轮叉通过起落架轮轴连接,活塞杆一端固连在起落架轮叉上,另一端插入前起落架支撑杆并通过起落架导向销安装在起落架支撑杆上。减震弹簧位于活塞杆与起落架支撑杆之间。起落架活塞杆可在起落架支撑杆内滑动。起落架活塞杆与起落架支撑杆之间的转动依靠起落架导向销限制约束,保证前起落架转向舵机对前轮的转向操纵。当无人机着地时,地面支反力通过机轮、轮叉传递到起落架活塞杆上。起落架活塞杆受力向上
一种基于弹射起飞的无人机前起落架舱段.pdf
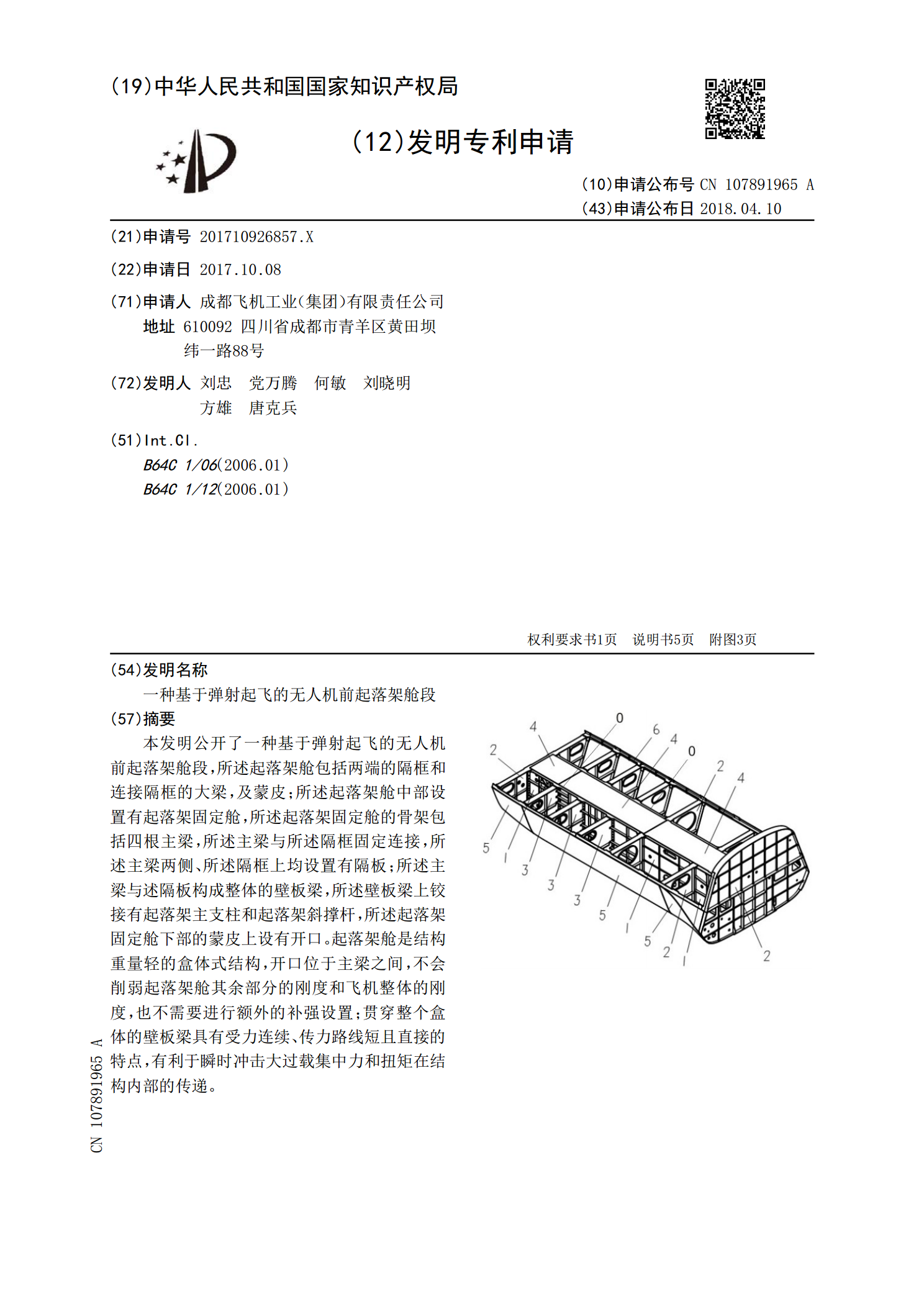
本发明公开了一种基于弹射起飞的无人机前起落架舱段,所述起落架舱包括两端的隔框和连接隔框的大梁,及蒙皮;所述起落架舱中部设置有起落架固定舱,所述起落架固定舱的骨架包括四根主梁,所述主梁与所述隔框固定连接,所述主梁两侧、所述隔框上均设置有隔板;所述主梁与述隔板构成整体的壁板梁,所述壁板梁上铰接有起落架主支柱和起落架斜撑杆,所述起落架固定舱下部的蒙皮上设有开口。起落架舱是结构重量轻的盒体式结构,开口位于主梁之间,不会削弱起落架舱其余部分的刚度和飞机整体的刚度,也不需要进行额外的补强设置;贯穿整个盒体的壁板梁具有