
车辆三维参数测量方法及装置.pdf

诗文****仙女

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车辆三维参数测量方法及装置.pdf
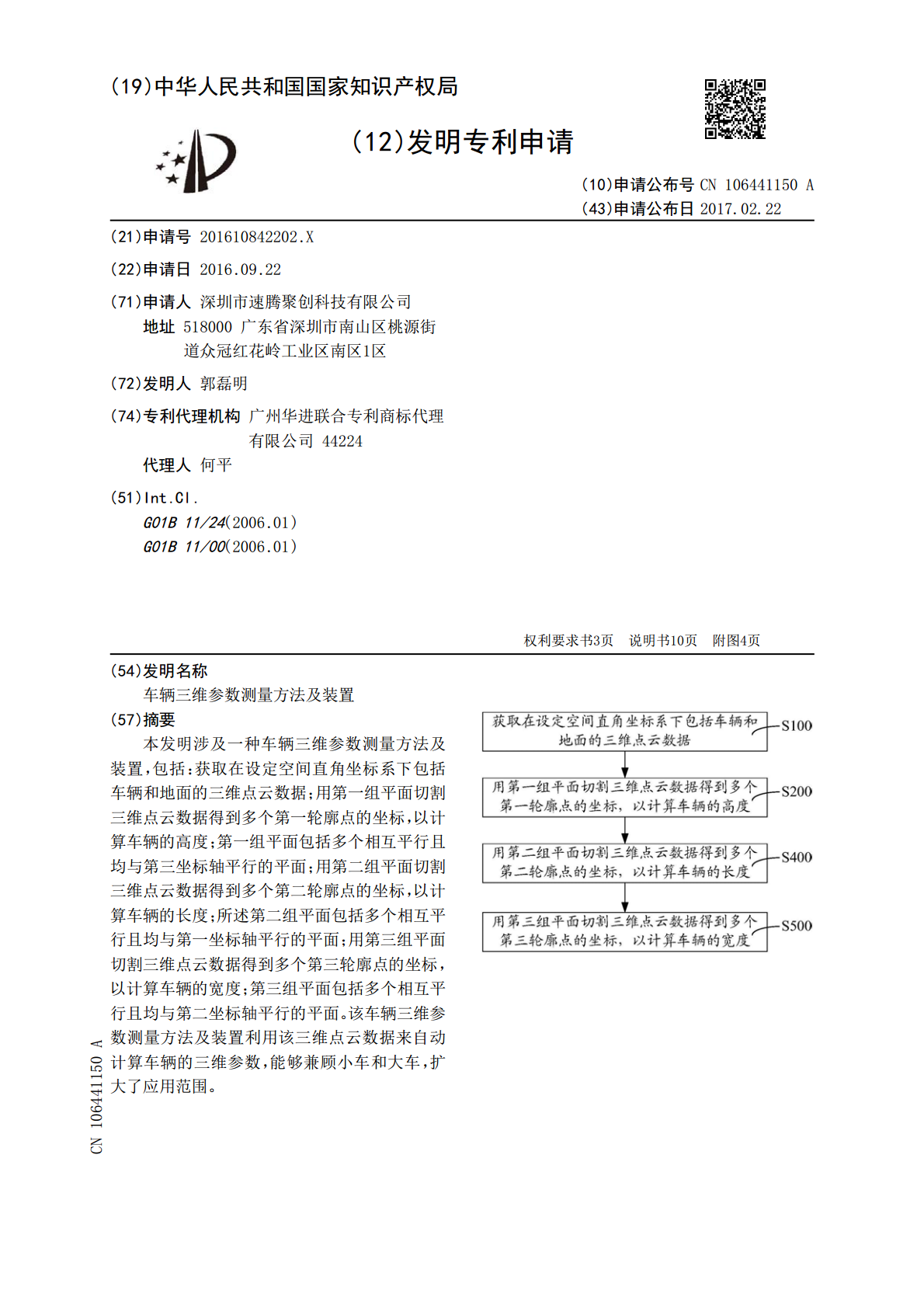
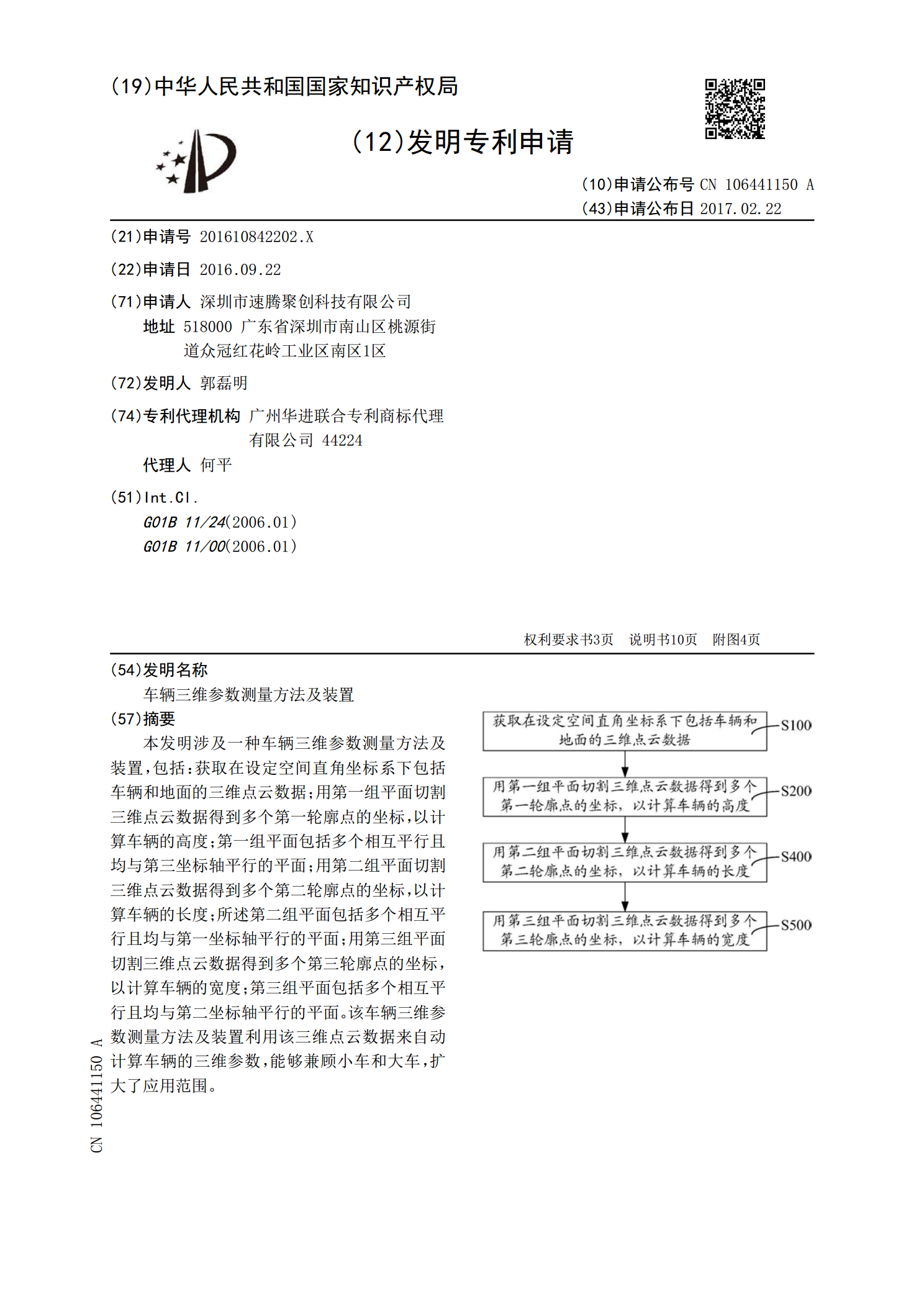
本发明涉及一种车辆三维参数测量方法及装置,包括:获取在设定空间直角坐标系下包括车辆和地面的三维点云数据;用第一组平面切割三维点云数据得到多个第一轮廓点的坐标,以计算车辆的高度;第一组平面包括多个相互平行且均与第三坐标轴平行的平面;用第二组平面切割三维点云数据得到多个第二轮廓点的坐标,以计算车辆的长度;所述第二组平面包括多个相互平行且均与第一坐标轴平行的平面;用第三组平面切割三维点云数据得到多个第三轮廓点的坐标,以计算车辆的宽度;第三组平面包括多个相互平行且均与第二坐标轴平行的平面。该车辆三维参数测量方法及
玉米籽粒三维参数测量装置及其测量方法.pdf
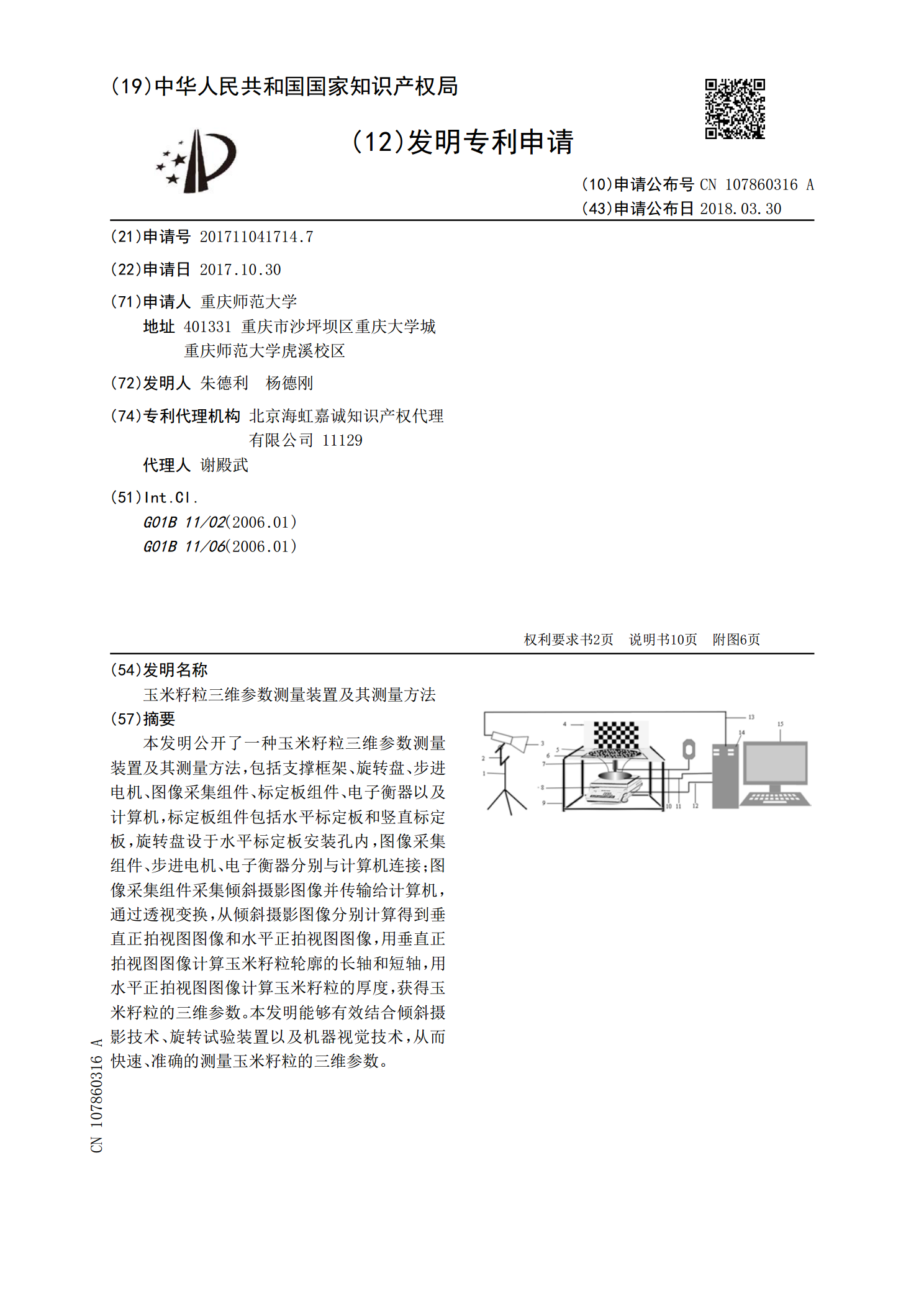
本发明公开了一种玉米籽粒三维参数测量装置及其测量方法,包括支撑框架、旋转盘、步进电机、图像采集组件、标定板组件、电子衡器以及计算机,标定板组件包括水平标定板和竖直标定板,旋转盘设于水平标定板安装孔内,图像采集组件、步进电机、电子衡器分别与计算机连接;图像采集组件采集倾斜摄影图像并传输给计算机,通过透视变换,从倾斜摄影图像分别计算得到垂直正拍视图图像和水平正拍视图图像,用垂直正拍视图图像计算玉米籽粒轮廓的长轴和短轴,用水平正拍视图图像计算玉米籽粒的厚度,获得玉米籽粒的三维参数。本发明能够有效结合倾斜摄影技术

心脏参数的测量方法及装置.pdf
一种心脏参数的测量方法,包括如下步骤:同步检测心电信号和光电容积描记信号,并进行预处理;对预处理后的心电信号和光电容积描记信号进行波形轮廓分析得到脉搏波到达时间和脉搏波拐点面积比;根据脉搏波拐点面积比计算得脉搏波反射系数比;通过脉搏波到达时间和脉搏波反射系数比进行估算得到血压和心输出量。上述心脏参数的测量方法及装置,通过对从心电信号和光电容积描记信号中得到的脉搏波拐点面积进行计算,以得到脉搏波反射系数比,进而对脉搏波反射系数比和脉搏波到达时间进行估算以得到血压和心输出量,这一血压和心输出量是同步测量得到的

轧辊和带钢三维表面形貌功能特征参数的测量方法及装置.pdf
本发明公开了一种轧辊和带钢三维表面形貌功能特征参数的测量方法及专用装置。该方法在读取原始轮廓值后,按照下述步骤进行处理数据:①消除形状误差,②消除波度误差,③修正奇异点,④计算二维轮廓高度分布概率,⑤计算三维轮廓高度分布概率,⑥由三维轮廓高度分布概率积分得到轮廓承载率曲线,根据承载区间分布数据计算三维表面形貌功能特征参数。本发明可在生产现场测量轧辊、带钢三维表面形貌功能特征参数,提高表征轧辊、带钢形貌的准确度。本发明能更全面表征轧辊、带钢的表面性质;不需要精确运动的载物台,测量时间短;能抵抗对测量影响较大
车辆速度测量方法及装置.pdf
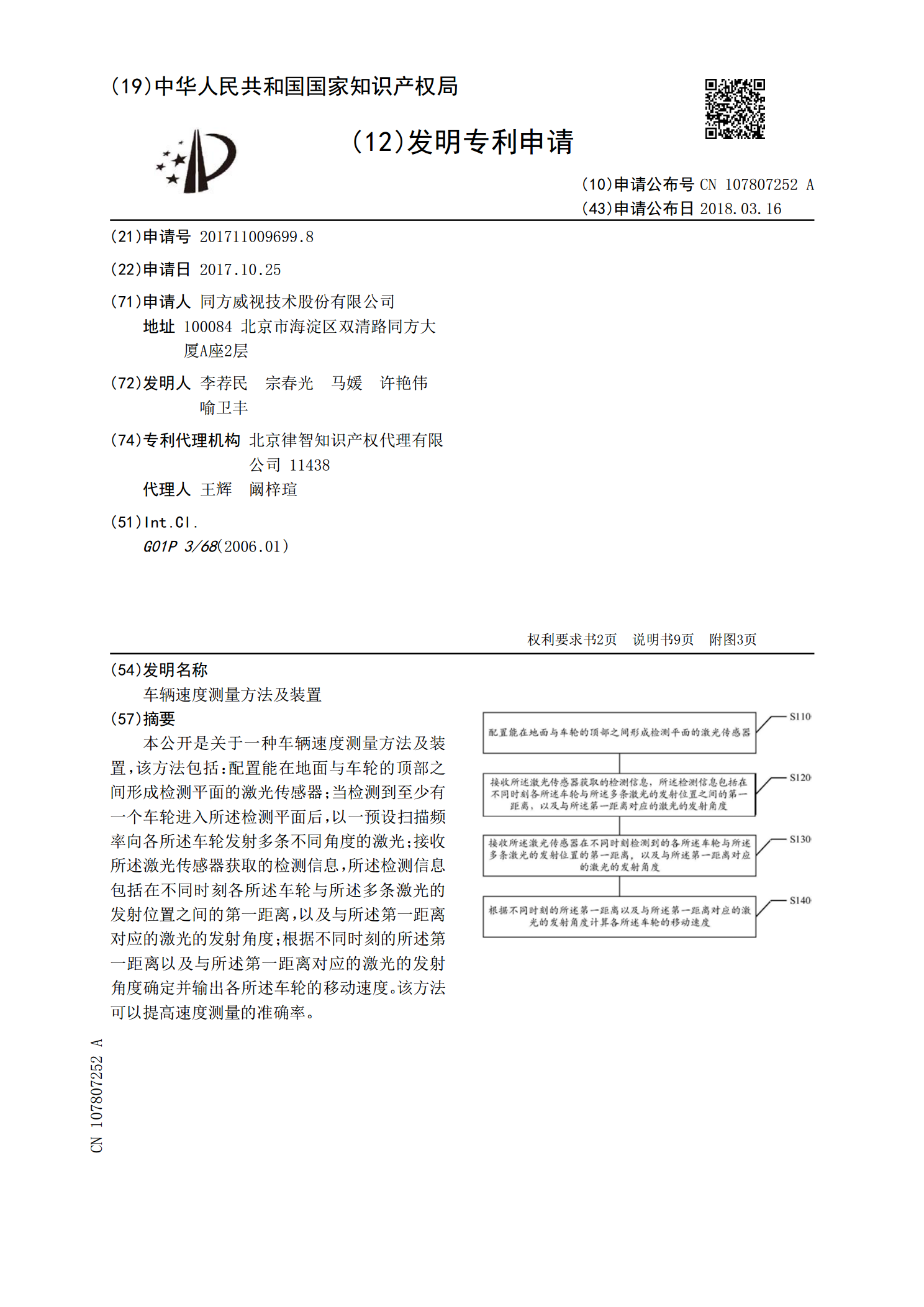
本公开是关于一种车辆速度测量方法及装置,该方法包括:配置能在地面与车轮的顶部之间形成检测平面的激光传感器;当检测到至少有一个车轮进入所述检测平面后,以一预设扫描频率向各所述车轮发射多条不同角度的激光;接收所述激光传感器获取的检测信息,所述检测信息包括在不同时刻各所述车轮与所述多条激光的发射位置之间的第一距离,以及与所述第一距离对应的激光的发射角度;根据不同时刻的所述第一距离以及与所述第一距离对应的激光的发射角度确定并输出各所述车轮的移动速度。该方法可以提高速度测量的准确率。