
一种无离合手轮操作的电动执行机构.pdf

慧红****ad


1/9

2/9

3/9
4/9

5/9

6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种无离合手轮操作的电动执行机构.pdf
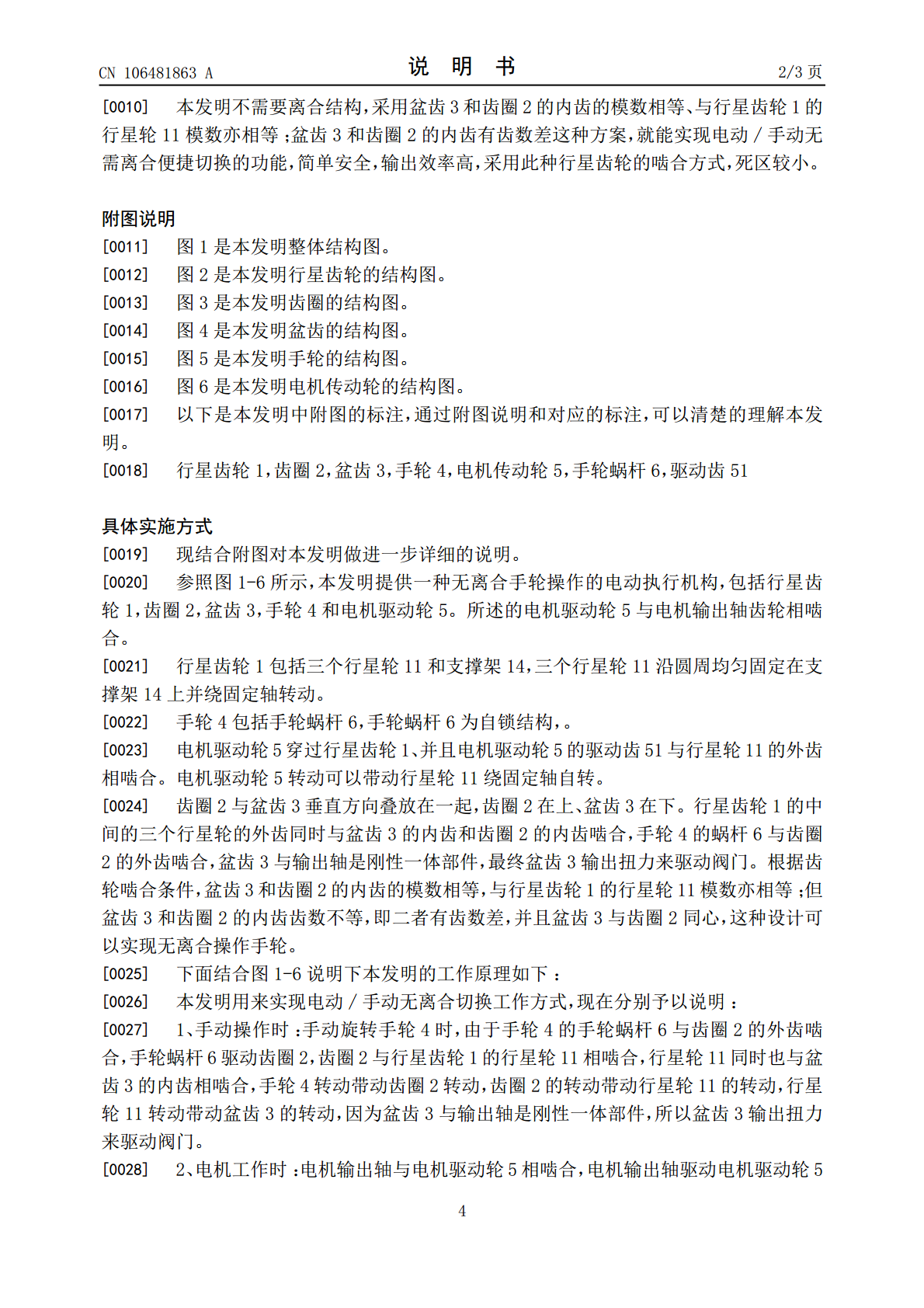
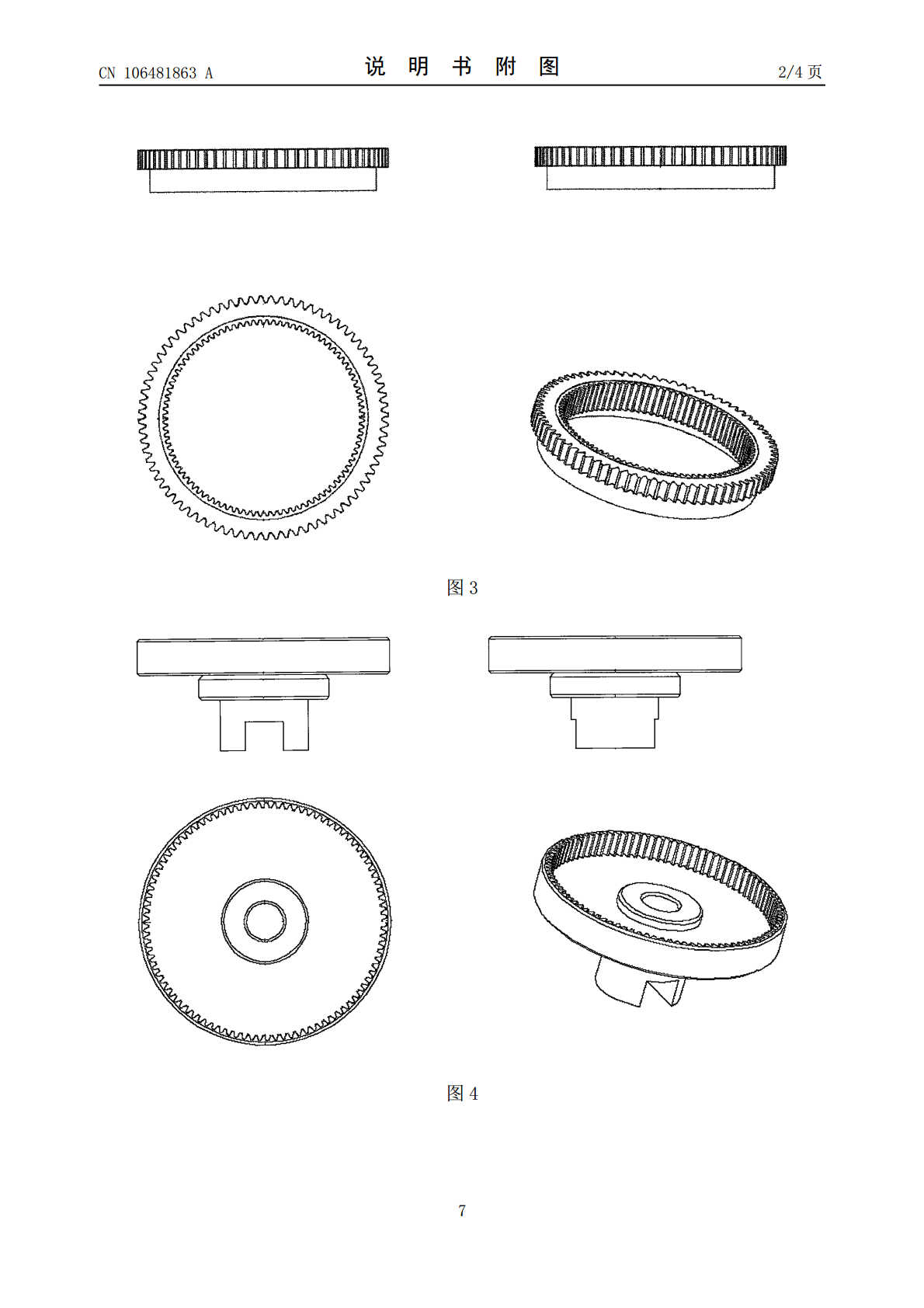
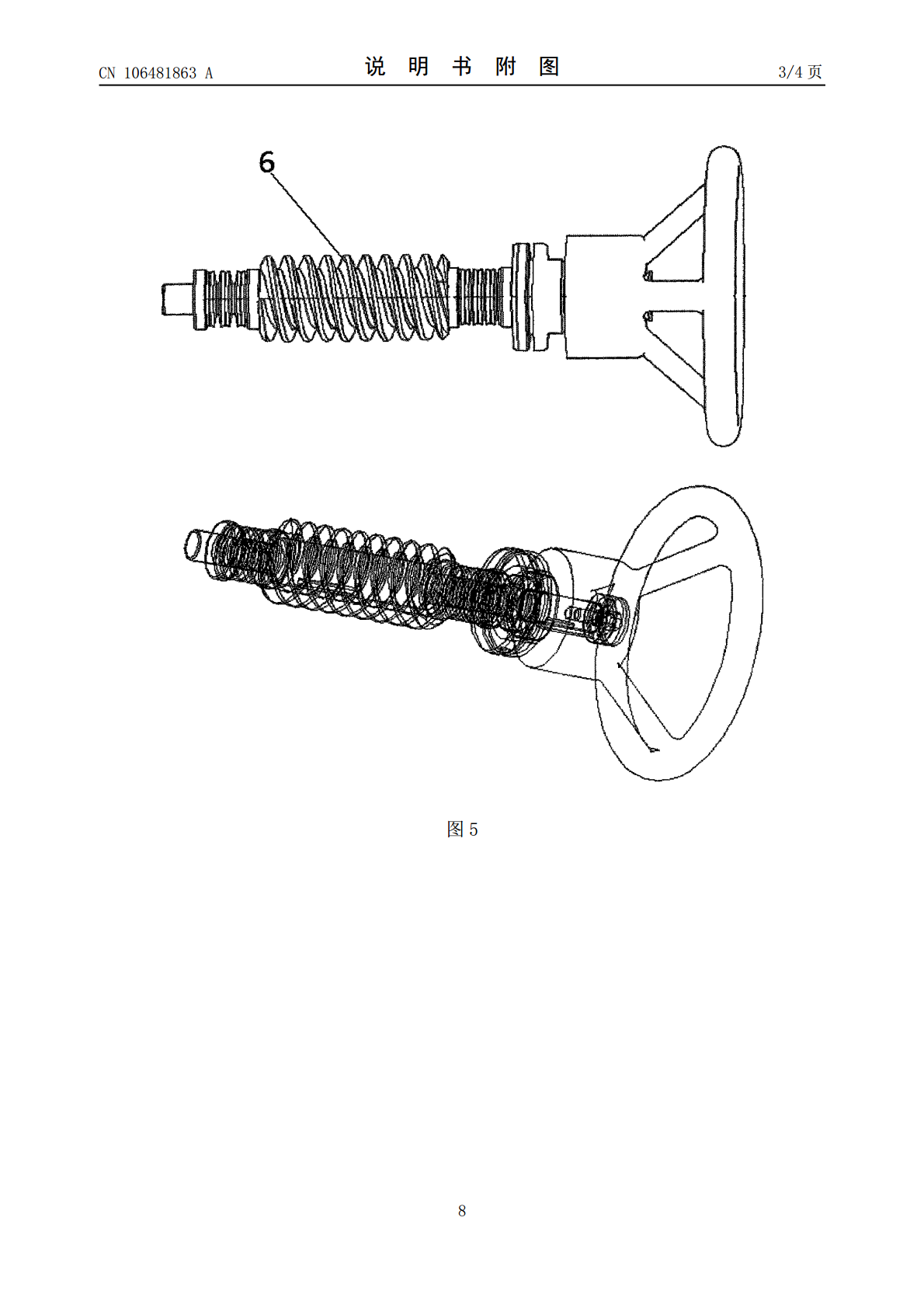
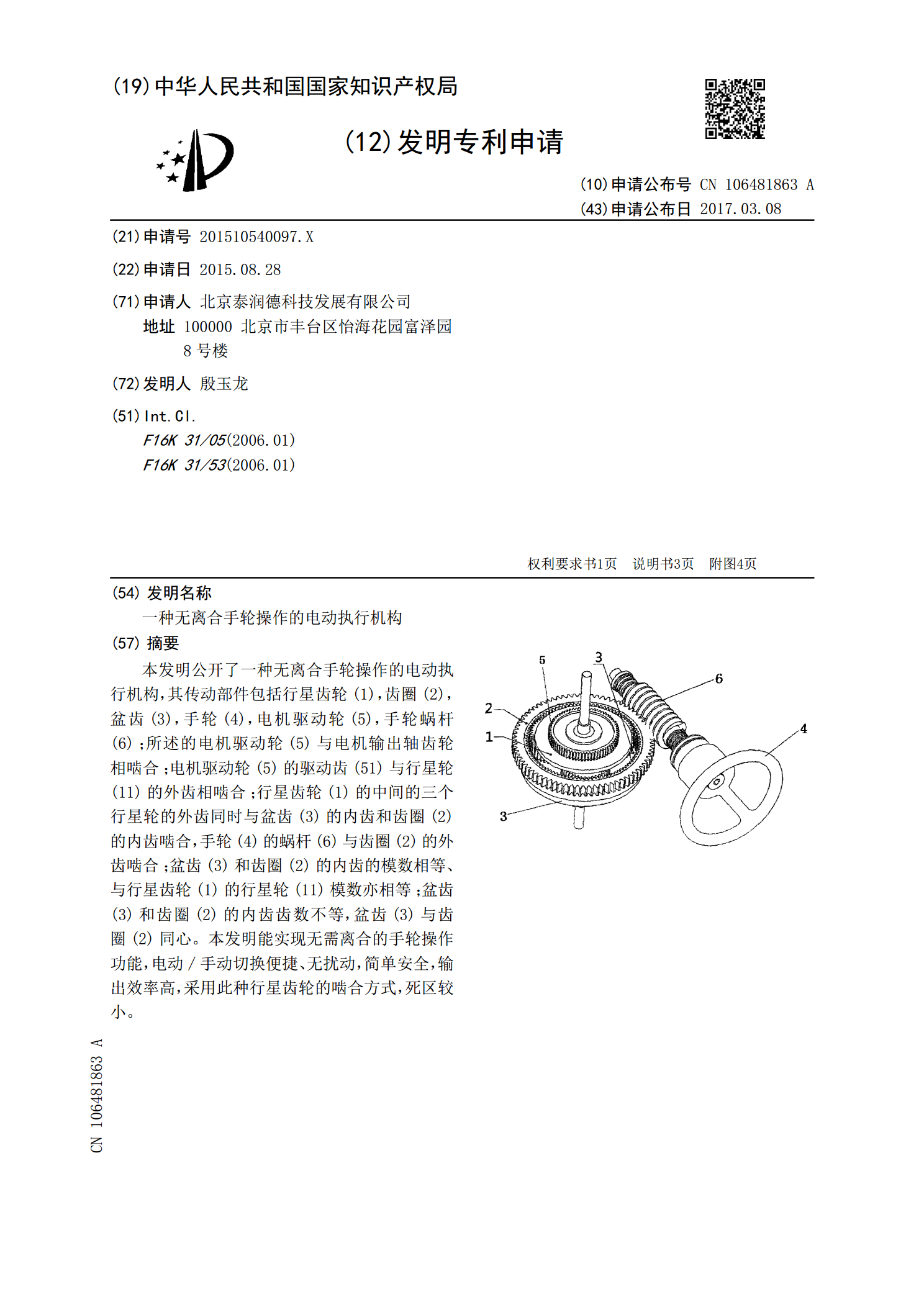
本发明公开了一种无离合手轮操作的电动执行机构,其传动部件包括行星齿轮(1),齿圈(2),盆齿(3),手轮(4),电机驱动轮(5),手轮蜗杆(6);所述的电机驱动轮(5)与电机输出轴齿轮相啮合;电机驱动轮(5)的驱动齿(51)与行星轮(11)的外齿相啮合;行星齿轮(1)的中间的三个行星轮的外齿同时与盆齿(3)的内齿和齿圈(2)的内齿啮合,手轮(4)的蜗杆(6)与齿圈(2)的外齿啮合;盆齿(3)和齿圈(2)的内齿的模数相等、与行星齿轮(1)的行星轮(11)模数亦相等;盆齿(3)和齿圈(2)的内齿齿数不等,盆齿

一种电动执行机构手轮自锁互保装置.pdf
本发明属于电动执行机构技术领域,公开了一种电动执行机构手轮自锁互保装置,包括外壳,所述外壳的两端通过螺栓分别固定连接有电机罩和手轮安装盖,所述电机罩的内部安装有驱动电机,所述手轮安装盖的一侧外壁上安装有手轮,所述外壳的内部安装有涡轮、控制器和空心蜗杆,所述空心蜗杆位于涡轮和控制器之间,且空心蜗杆的两端分别与驱动电机和手轮转动连接,本发明设置了第一锁定件、第二锁定件和切换螺杆,在进行该电动执行机构的手自动切换时,利用切换螺杆的伸缩同步改变了两个锁定件与两个锥齿轮之间的定位状态,使得该执行机构在更换驱动方式时

一种电动执行机构的手动/电动操作无扰切换结构.pdf
本发明涉及一种电动执行机构的手动/电动操作无扰切换结构,包括电动轴、手动轴和输出轴,特点是:输出轴上装有通过花键连接的滑动轴,滑动轴和手动轴设有配合的莫氏锥度轴端和孔,滑动轴的端部设有弹性压紧结构;滑动轴上装有带楔形缺口的过渡轮,缺口中部设径向通槽;缺口内设有滚柱、顶销和压簧;滑动轴上设插入径向通槽内的拨块;电动轴套装在过渡轮上;顶销将滚柱压紧在拨块及电动轴上;拨块与径向通槽之间留有间隙;过渡轮和滑动轴上制有相啮合的端面齿。上述无扰切换结构相对于现有切换结构,具有结构紧凑,操作方便的特点,在手动操作时通过

一种电动执行机构的手动/电动操作无扰切换结构.pdf
本发明涉及一种电动执行机构的手动/电动操作无扰切换结构,包括电动轴和手动轴,特点是:手动轴和电动轴之间设有过渡轮,过渡轮的内、外圆面上均布对称的楔形缺口,缺口之间设有径向通槽;缺口内设有滚柱、顶销和压簧,其底边上设有压簧安装孔;电动轴上设有插入径向通槽内的拨块;外圆面上的顶销将滚柱压紧在拨块的侧边和手动轴上,内圆面上的顶销将滚柱压紧在拨块的侧边和电动轴上;拨块与径向通槽之间留有间隙。上述无扰切换结构相对于现有切换结构,具有结构紧凑,操作方便的特点,能实现手动和电动分别操作,且在电动操作时通过拨块自动切断手
一种电动执行器操作手轮.pdf
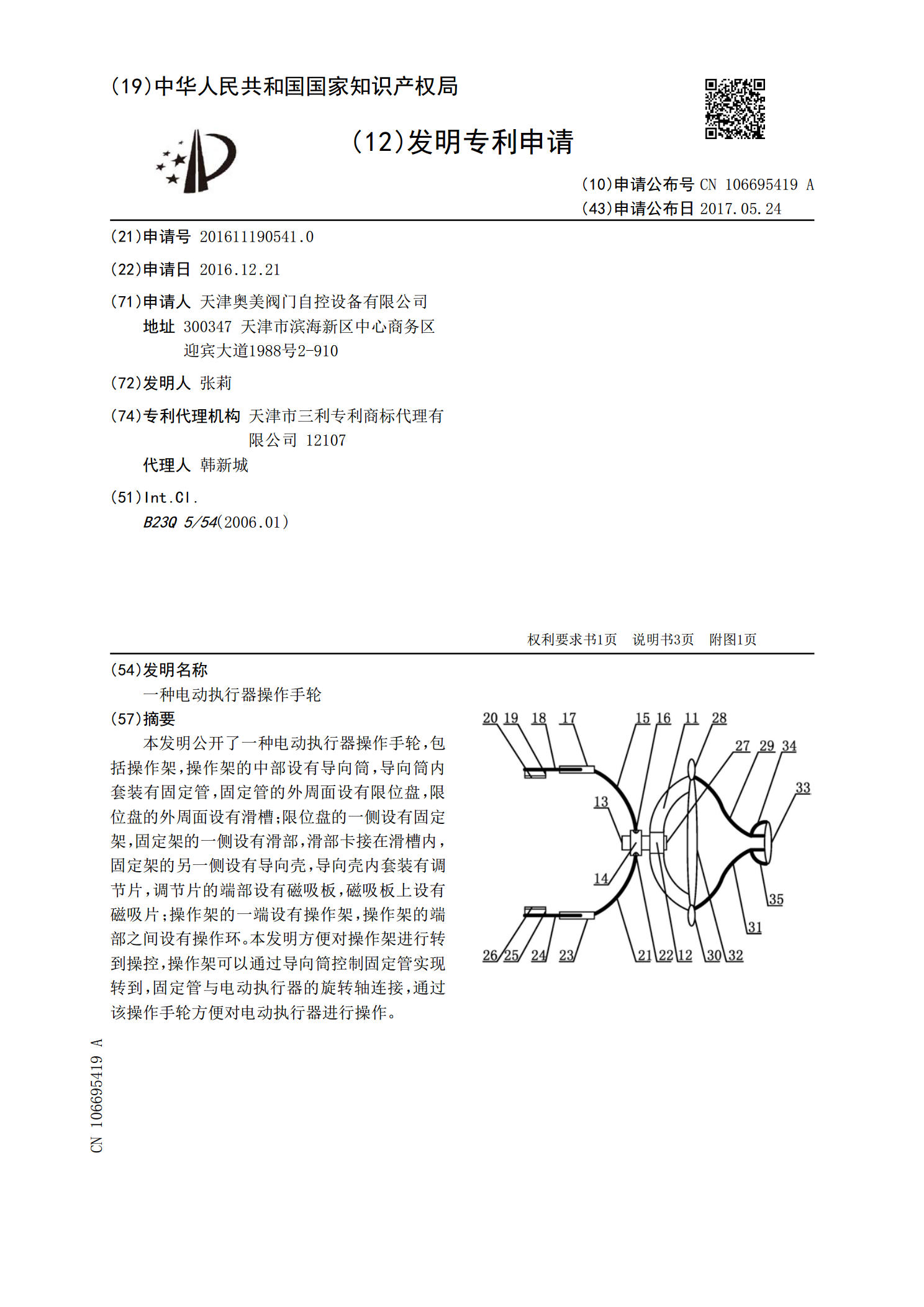
本发明公开了一种电动执行器操作手轮,包括操作架,操作架的中部设有导向筒,导向筒内套装有固定管,固定管的外周面设有限位盘,限位盘的外周面设有滑槽;限位盘的一侧设有固定架,固定架的一侧设有滑部,滑部卡接在滑槽内,固定架的另一侧设有导向壳,导向壳内套装有调节片,调节片的端部设有磁吸板,磁吸板上设有磁吸片;操作架的一端设有操作架,操作架的端部之间设有操作环。本发明方便对操作架进行转到操控,操作架可以通过导向筒控制固定管实现转到,固定管与电动执行器的旋转轴连接,通过该操作手轮方便对电动执行器进行操作。