
一种室内循迹智能机器人的底盘.pdf

小长****6淑


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种室内循迹智能机器人的底盘.pdf
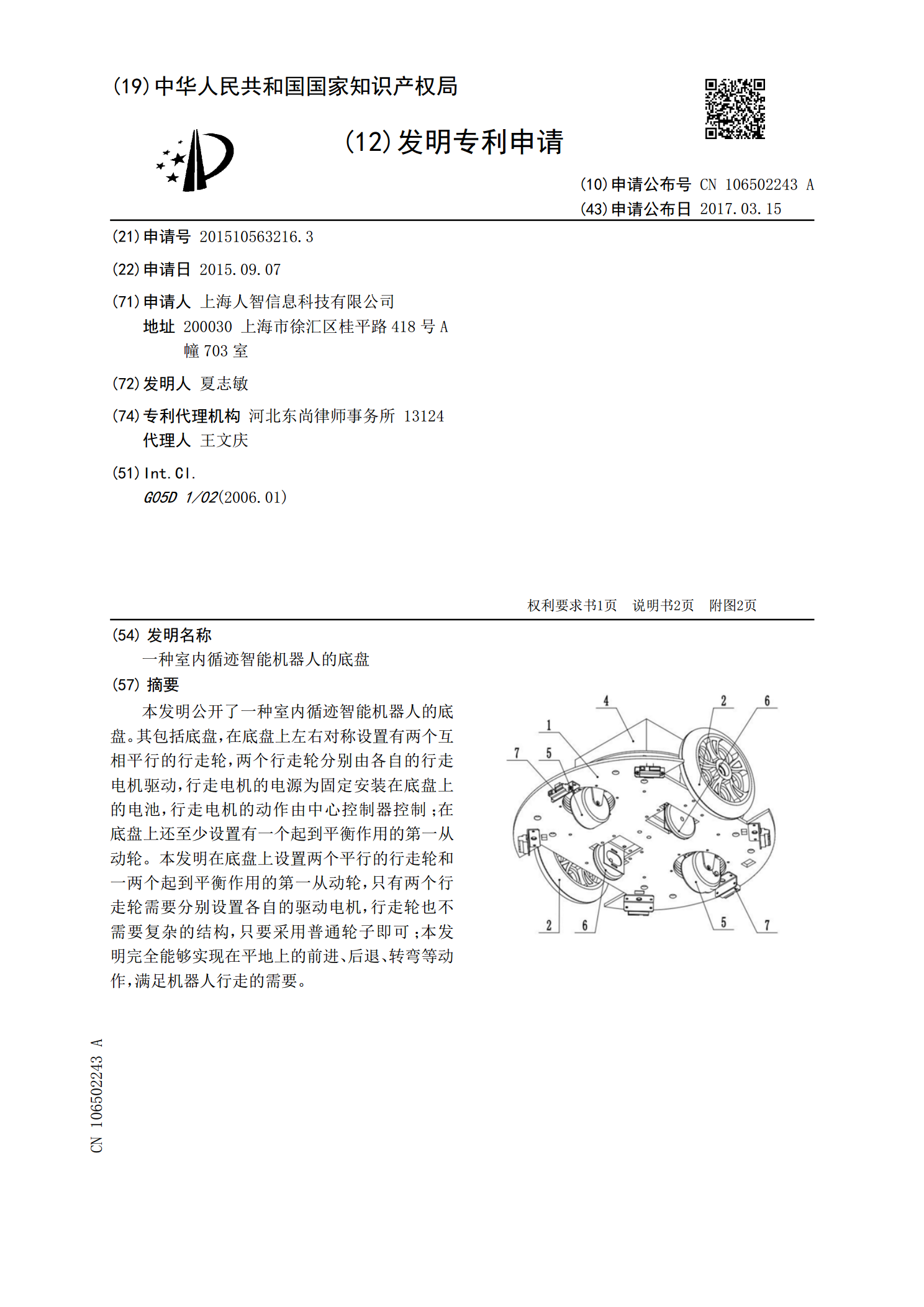
本发明公开了一种室内循迹智能机器人的底盘。其包括底盘,在底盘上左右对称设置有两个互相平行的行走轮,两个行走轮分别由各自的行走电机驱动,行走电机的电源为固定安装在底盘上的电池,行走电机的动作由中心控制器控制;在底盘上还至少设置有一个起到平衡作用的第一从动轮。本发明在底盘上设置两个平行的行走轮和一两个起到平衡作用的第一从动轮,只有两个行走轮需要分别设置各自的驱动电机,行走轮也不需要复杂的结构,只要采用普通轮子即可;本发明完全能够实现在平地上的前进、后退、转弯等动作,满足机器人行走的需要。
一种智能循迹机器人、系统及控制方法.pdf
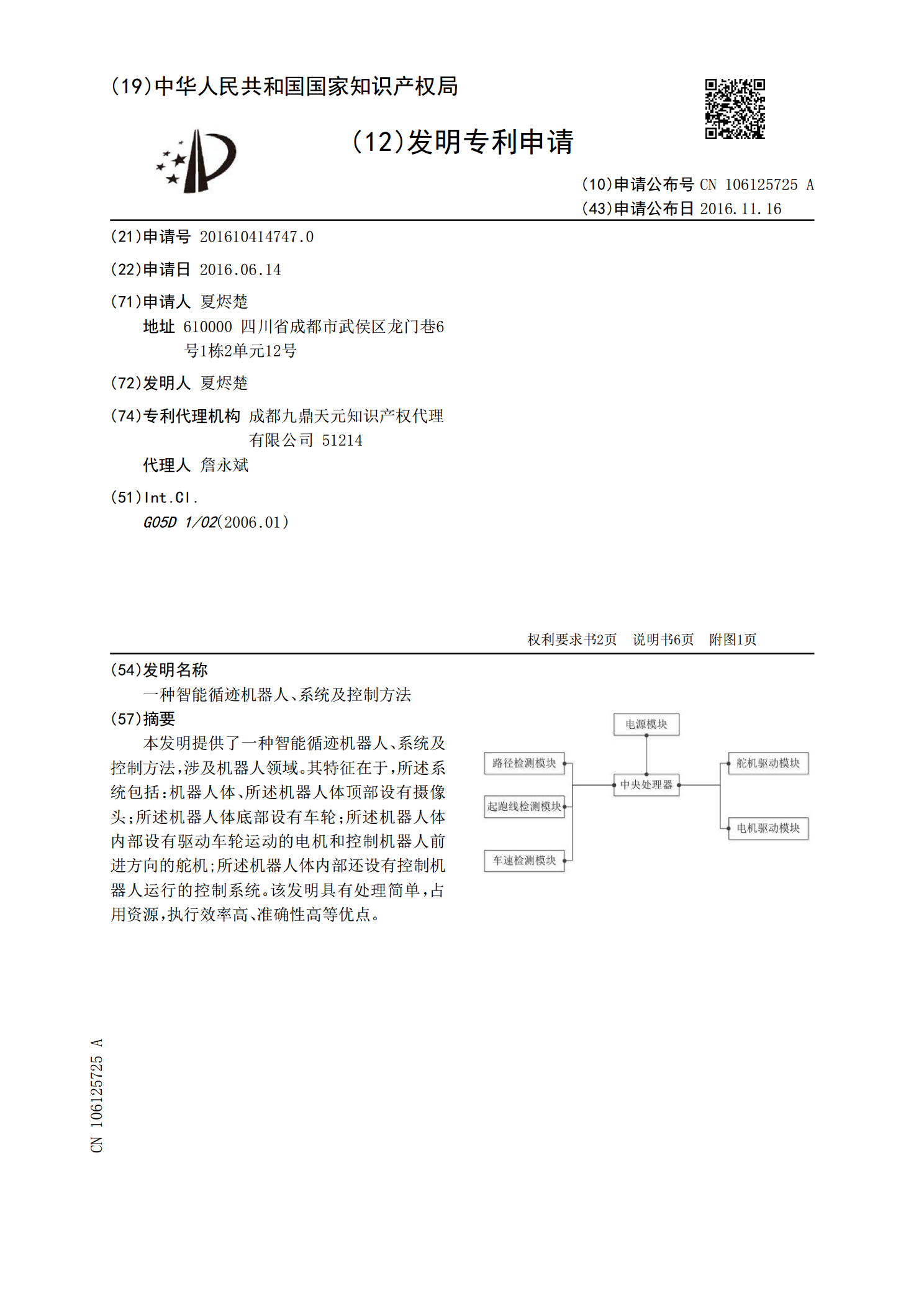
本发明提供了一种智能循迹机器人、系统及控制方法,涉及机器人领域。其特征在于,所述系统包括:机器人体、所述机器人体顶部设有摄像头;所述机器人体底部设有车轮;所述机器人体内部设有驱动车轮运动的电机和控制机器人前进方向的舵机;所述机器人体内部还设有控制机器人运行的控制系统。该发明具有处理简单,占用资源,执行效率高、准确性高等优点。

智能循迹机器人教学设计.doc
智能循迹机器人教学设计瓦房店市第七初级中学陈慧娜一、教学目标:知识与技能:1、了解光电传感器的工作原理;2、掌握用光电传感器识别黑色和白色的方法;3、理解巡线传感器与条件判断语句、循环语句的综合运用过程与方法:逐步掌握根据实际环境调试机器人的方法;通过探究性学习小组合作学习借助教学视频自主学习情感态度与价值观:通过探究和小组合作学习,培养学生的动手能力、观察能力、创新能力和合作交流能力感受科技给人类生活带来的巨大变化,培养学生热爱科学、崇山科学的精神。教学内容分析:本节课的教学内容,是一节综合活动项目《智

智能循迹搬运机器人ppt.ppt
智能循迹搬运机器人(又称AGV小车)以ARM新一代嵌入式并行读写操作部件为控制核心,实现对小车的智能控制。此控制系统不仅在机器人中有很强的使用价值,在汽车领域,智能家居等方面都有很高的是实用价值,尤其在智能机器人领域有很高发展前景。所以本设计与实际相联系,具有很重要的意义。本机器人是由上海未来伙伴公司提供新型机器人MF13以及我们的改造创新。机器人小车最适合在那些人类无法工作的环境中工作和单一重复性的工作解决了人所不适应的生产和工作环境,在钢铁厂,AGV小车负责炉料运输,大大降低了工人们的劳动强度。在核电

智能循迹搬运机器人ppt.ppt
智能循迹搬运机器人(又称AGV小车)以ARM新一代嵌入式并行读写操作部件为控制核心,实现对小车的智能控制。此控制系统不仅在机器人中有很强的使用价值,在汽车领域,智能家居等方面都有很高的是实用价值,尤其在智能机器人领域有很高发展前景。所以本设计与实际相联系,具有很重要的意义。本机器人是由上海未来伙伴公司提供新型机器人MF13以及我们的改造创新。机器人小车最适合在那些人类无法工作的环境中工作和单一重复性的工作解决了人所不适应的生产和工作环境,在钢铁厂,AGV小车负责炉料运输,大大降低了工人们的劳动强度。在核电