
一种支持智能终端机械结构的智能轮椅.pdf

东耀****哥哥

1/10

2/10

3/10

4/10

5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种支持智能终端机械结构的智能轮椅.pdf
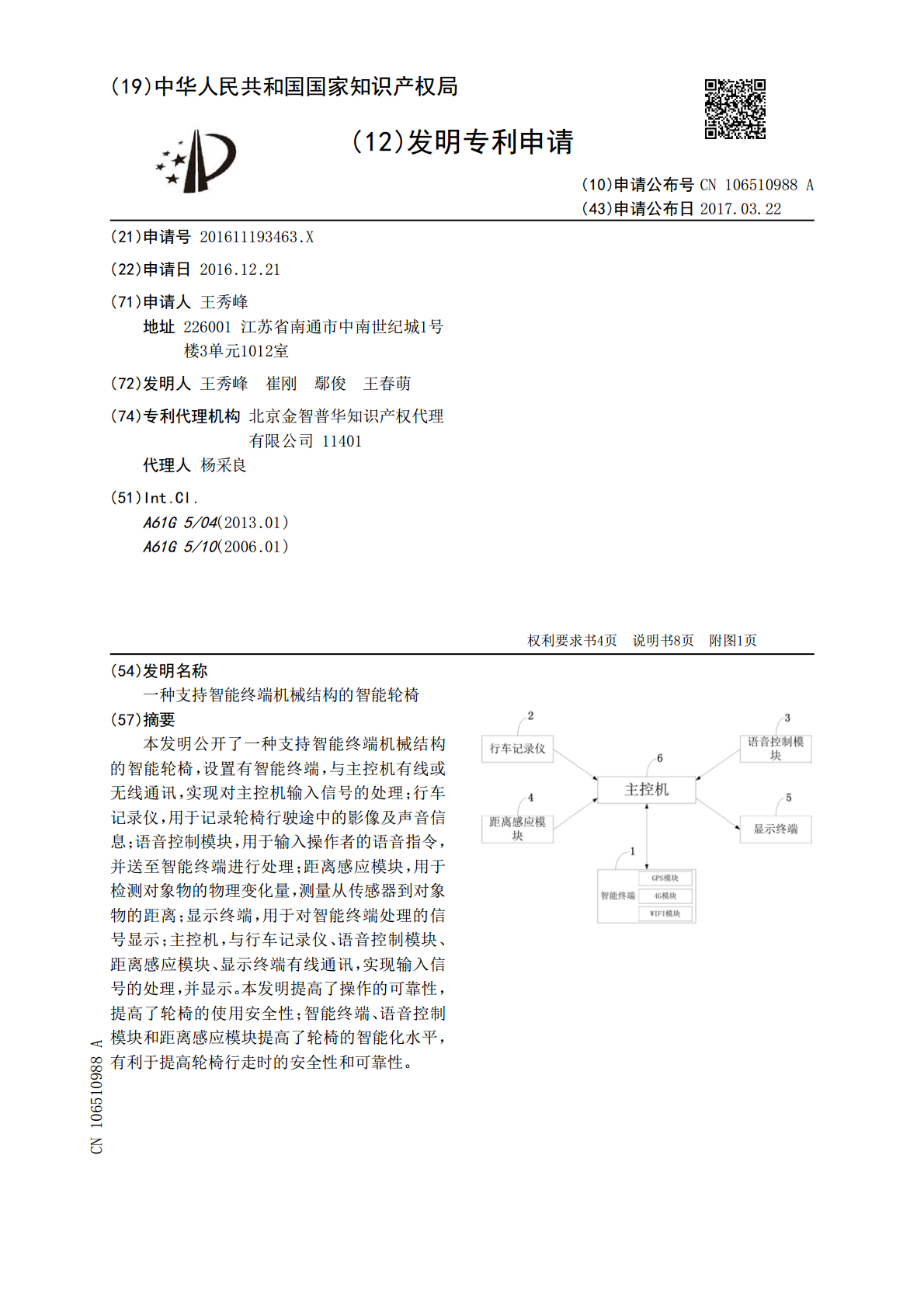
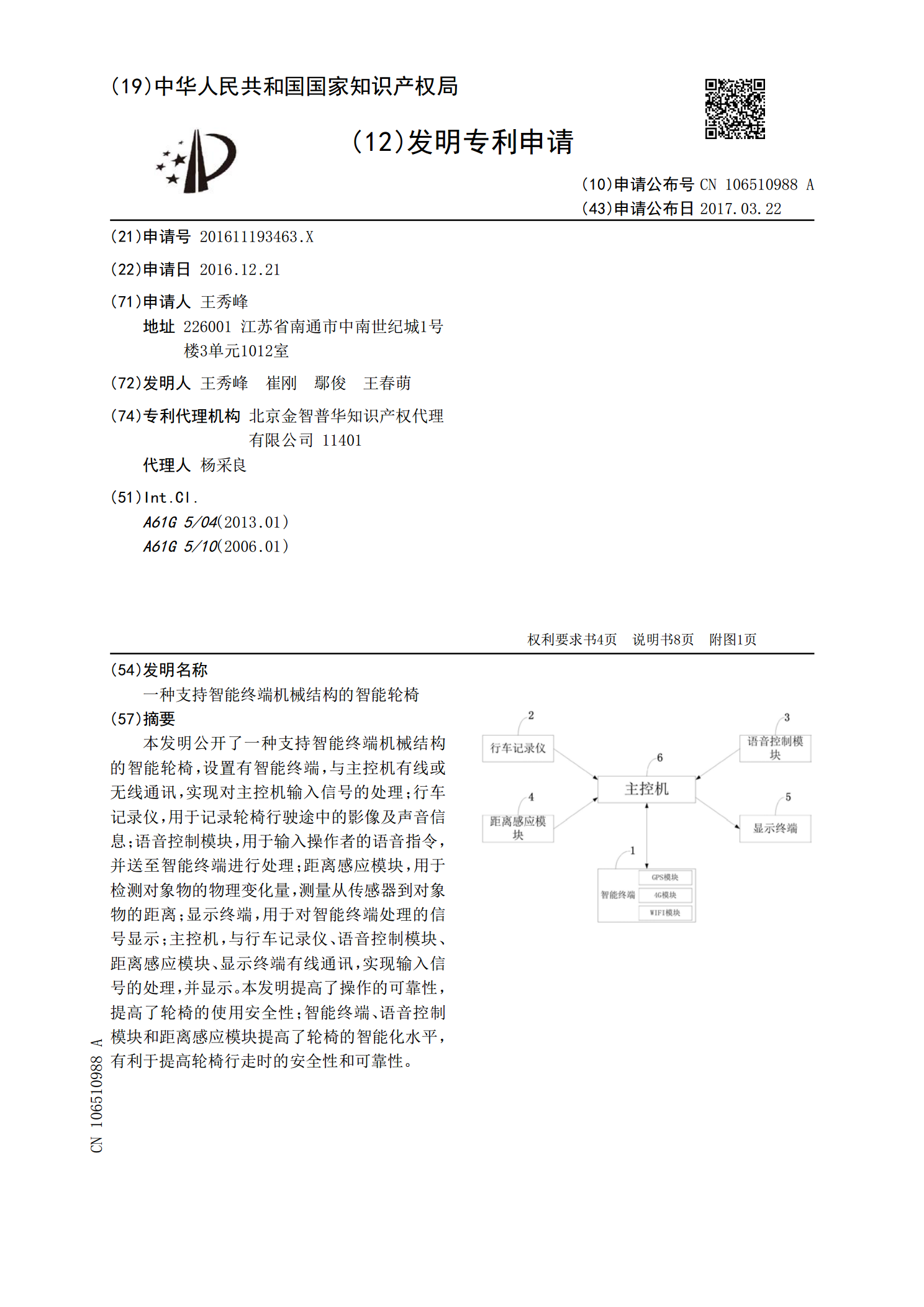
本发明公开了一种支持智能终端机械结构的智能轮椅,设置有智能终端,与主控机有线或无线通讯,实现对主控机输入信号的处理;行车记录仪,用于记录轮椅行驶途中的影像及声音信息;语音控制模块,用于输入操作者的语音指令,并送至智能终端进行处理;距离感应模块,用于检测对象物的物理变化量,测量从传感器到对象物的距离;显示终端,用于对智能终端处理的信号显示;主控机,与行车记录仪、语音控制模块、距离感应模块、显示终端有线通讯,实现输入信号的处理,并显示。本发明提高了操作的可靠性,提高了轮椅的使用安全性;智能终端、语音控制模块和

智能终端的天线结构及智能终端.pdf
本发明提供一种智能终端的天线结构,包括金属件及天线本体;所述天线本体上设置有地馈引脚及馈电引脚,所述金属件上设置有地馈引脚,所述地馈引脚用于连接智能终端的电路板中的接地点,所述馈电引脚用于连接智能终端的电路板中的射频电路。本发明还提供一种智能终端。本发明提供的智能终端的天线结构及智能终端,能够提高天线结构的整体性能,预留其他天线的匹配位,增加了天线的走线面积,解决了天线个数多的问题,且节约了天线成本。

一种基于移动终端控制的智能轮椅.pdf
一种基于移动终端控制的智能轮椅,所述基于移动终端控制的智能轮椅包括轮椅的硬件机构、传感模块、移动终端和数据处理云终端,其中,通过传感模块采集使用者在起坐训练过程中的至少一个监测数据以及通过移动终端采集使用者的个人信息,并由所述移动终端将所述至少一个监测数据以及所述个人信息通过无线网络上传至数据处理云终端进行数据处理后提供针对所述起坐训练的训练建议和/或训练计划。本发明实现了针对下肢瘫痪使用者的起坐训练功能,以及通过传感模块、移动终端和数据处理云终端实现了人机交互功能,能够针对使用者的康复情况提供康复训练建
一种智能轮椅及智能轮椅安全系统.pdf
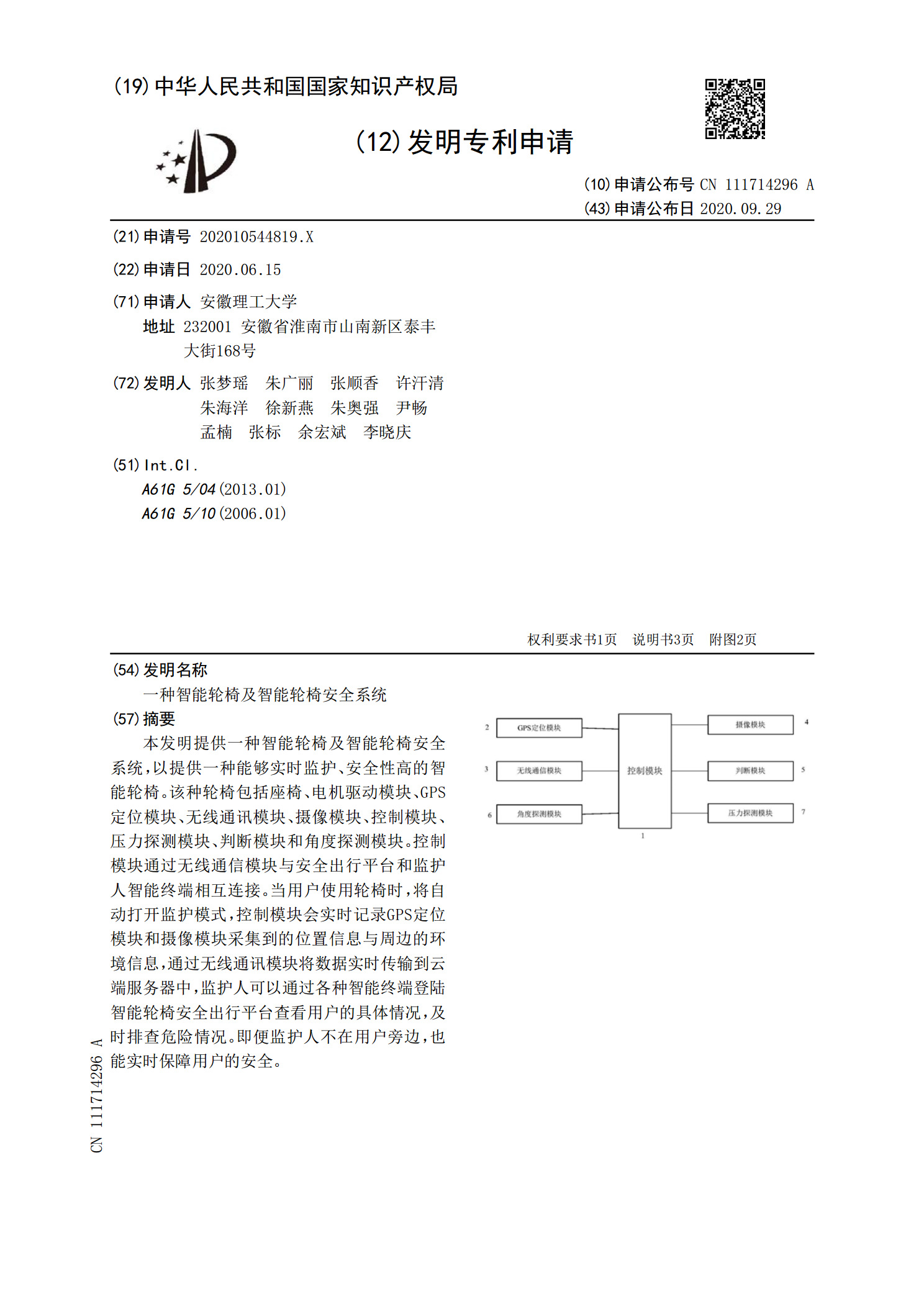
本发明提供一种智能轮椅及智能轮椅安全系统,以提供一种能够实时监护、安全性高的智能轮椅。该种轮椅包括座椅、电机驱动模块、GPS定位模块、无线通讯模块、摄像模块、控制模块、压力探测模块、判断模块和角度探测模块。控制模块通过无线通信模块与安全出行平台和监护人智能终端相互连接。当用户使用轮椅时,将自动打开监护模式,控制模块会实时记录GPS定位模块和摄像模块采集到的位置信息与周边的环境信息,通过无线通讯模块将数据实时传输到云端服务器中,监护人可以通过各种智能终端登陆智能轮椅安全出行平台查看用户的具体情况,及时排查危
一种智能轮椅及智能轮椅安全系统.pdf
本实用新型提供一种智能轮椅及智能轮椅安全系统,以提供一种能够实时监护、安全性高的智能轮椅。该种轮椅包括座椅、电机驱动模块、GPS定位模块、无线通讯模块、摄像模块、控制模块、压力探测模块、判断模块和角度探测模块。控制模块通过无线通信模块与安全出行平台和监护人智能终端相互连接。当用户使用轮椅时,将自动打开监护模式,控制模块会实时记录GPS定位模块和摄像模块采集到的位置信息与周边的环境信息,通过无线通讯模块将数据实时传输到云端服务器中,监护人可以通过各种智能终端登陆智能轮椅安全出行平台查看用户的具体情况,及时排