
一种船载GNSS辅助北斗导航卫星定轨方法.pdf

梦影****主a

1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种船载GNSS辅助北斗导航卫星定轨方法.pdf
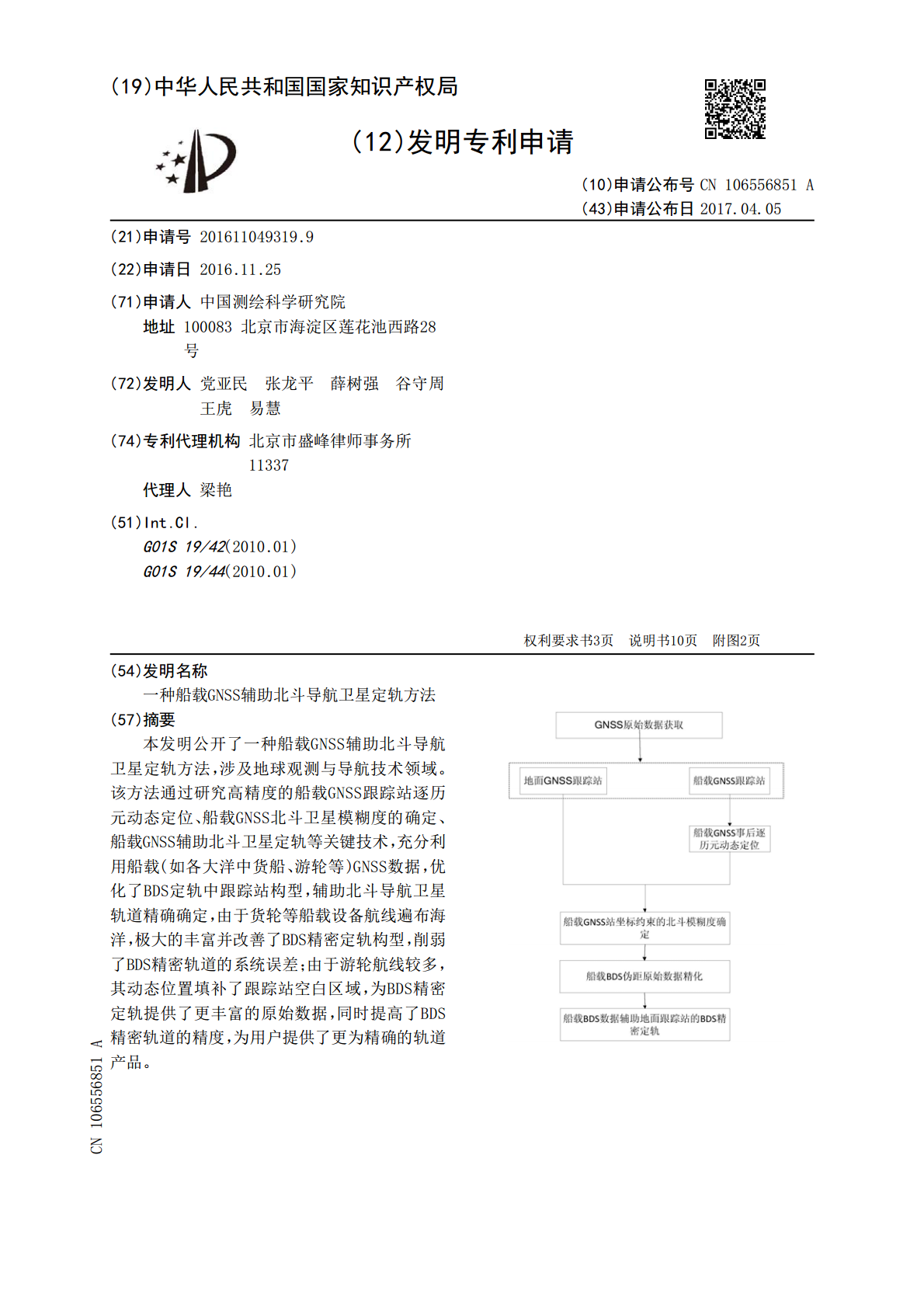
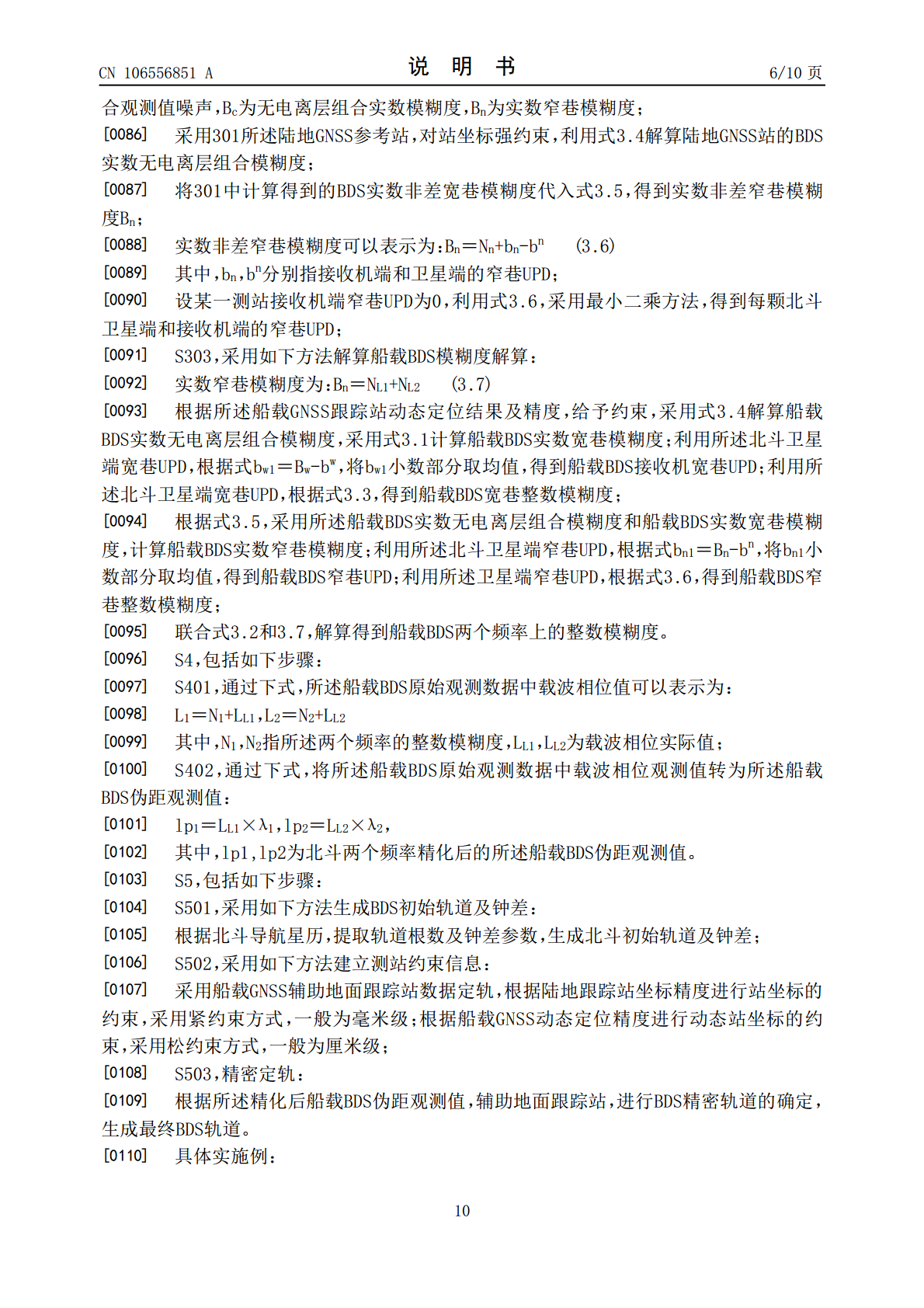
本发明公开了一种船载GNSS辅助北斗导航卫星定轨方法,涉及地球观测与导航技术领域。该方法通过研究高精度的船载GNSS跟踪站逐历元动态定位、船载GNSS北斗卫星模糊度的确定、船载GNSS辅助北斗卫星定轨等关键技术,充分利用船载(如各大洋中货船、游轮等)GNSS数据,优化了BDS定轨中跟踪站构型,辅助北斗导航卫星轨道精确确定,由于货轮等船载设备航线遍布海洋,极大的丰富并改善了BDS精密定轨构型,削弱了BDS精密轨道的系统误差;由于游轮航线较多,其动态位置填补了跟踪站空白区域,为BDS精密定轨提供了更丰富的原始

北斗船载导航终端.docx
北斗船载导航终端-LC369双模一体机规格书一、产品简介北斗船载导航终端-LC369一体机内部集成RDSS模块、RNSSB1/GPSL1模块、天线等,该模块集成度高、功耗低、可完整实现RDSS定位、短报文通信功能,并且实时接收RDSS、RNSSB1/GPSL1卫星导航信号。北斗船载导航终端-LC369一体机体积小巧、功耗低,连接简单、操作方便,非常适应于船舰导航等大规模应用。二、功能特点全天候的定位导航和双向报文通信功能;支持BD/GPS双模工作,保证定位结果准确;集成化程度高,RDSS模块、RNSS模块

基于北斗卫星船载导航系统研究的综述报告.docx
基于北斗卫星船载导航系统研究的综述报告近年来,随着北斗卫星导航系统的全球应用,船载导航系统的应用也逐渐得到推广。船载导航系统一般包括卫星导航接收机、惯性导航系统、船舶自动控制系统等。其中,北斗卫星船载导航系统是基于北斗卫星定位技术和船载设备控制技术的融合应用系统。北斗卫星船载导航系统的特点北斗卫星船载导航系统具有以下特点:1.高可靠性。北斗卫星系统的覆盖面积广,信号覆盖面积基本覆盖全球,能够保证船舶位置的精确获取和跟踪。2.高精度。北斗卫星船载导航系统可以实现厘米级别的精度,适用于海上复杂环境下的导航需求

基于北斗卫星船载导航系统研究的任务书.docx
基于北斗卫星船载导航系统研究的任务书任务书一、任务背景北斗卫星是我国自主研制的全球卫星导航系统,在国防安全、交通运输、地震监测等领域都具有广泛的应用。而在航海领域中,北斗卫星的应用也日益普及。船舶在海上航行时,需要依赖导航设备确定自身的位置和航向,保障航行的安全。而船载导航系统的发展与应用,则是实现这一目标的关键。针对目前船载导航系统在北斗卫星应用方面的问题,需要进行深入研究,以推动北斗卫星船载导航系统的进一步发展与应用。二、任务目标本次任务的目标是基于北斗卫星船载导航系统的研究,探索解决当前系统中存在的

一种低轨卫星辅助的GNSS长码信号捕获方法及装置.pdf
本发明提供了一种低轨卫星辅助的GNSS长码信号捕获方法及装置,包括:获取GNSS基带信号;混频运算;分段相关运算;长时间相干积分;非相干积分运算;峰值检测与门限判决。本发明的优点在于:利用低轨卫星的辅助获取GNSS导航信号辅助信息,包括粗略多普勒信息和粗略码相位信息,一方面利用粗略码相位信息产生本地测距码的子码并参与相关运算,保证在相关运算后消除“比特跳变“对相干积分时间的影响,通过长时间相干积分实现长码的高灵敏捕获,提高低信噪比环境下长码信号捕获性能;另一方面利用GNSS导航信号的粗略多普勒信息和粗略码