
测风系统、测风方法、偏航控制方法和主控系统.pdf

哲妍****彩妍


1/10

2/10
3/10

4/10

5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
测风系统、测风方法、偏航控制方法和主控系统.pdf
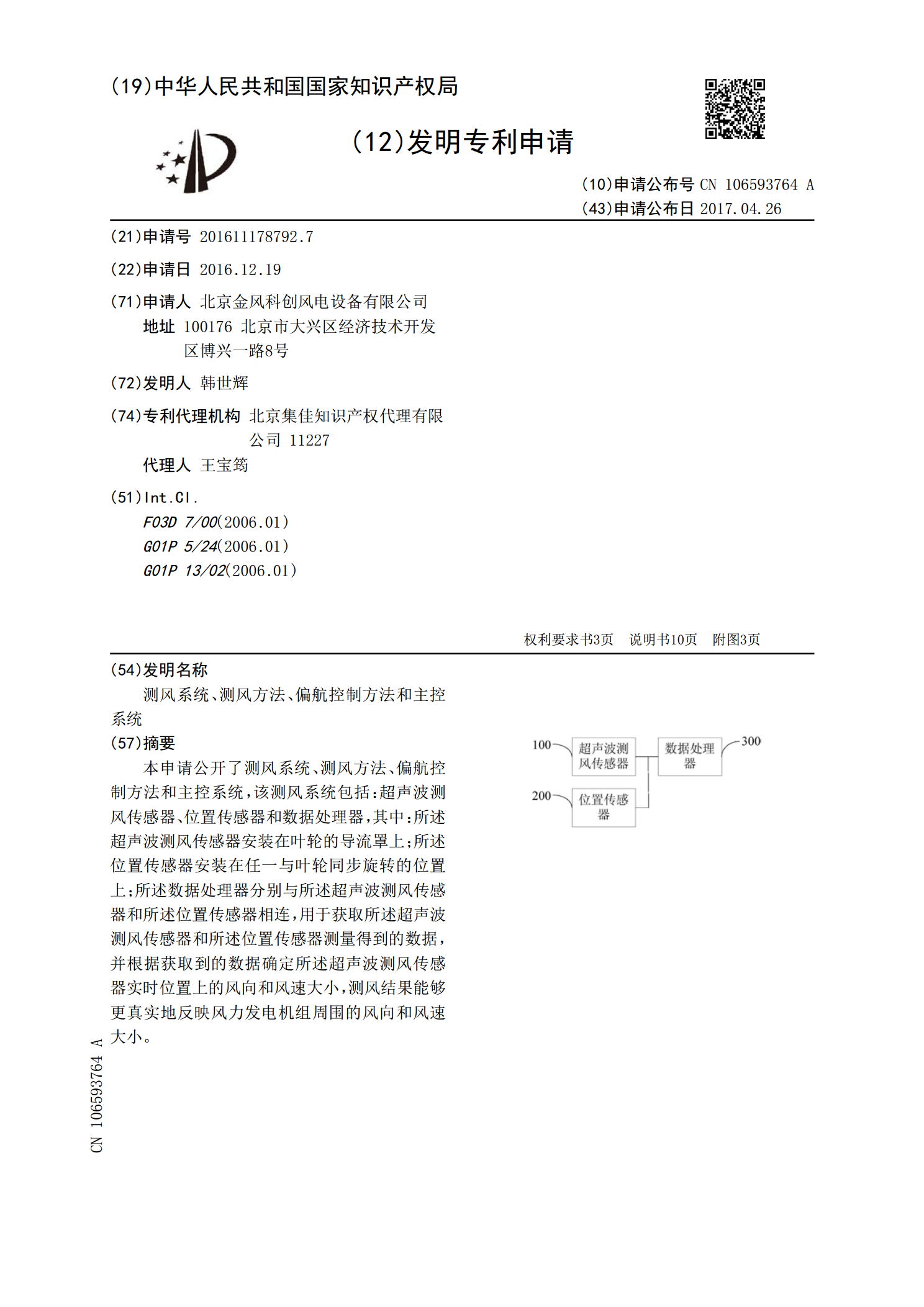
本申请公开了测风系统、测风方法、偏航控制方法和主控系统,该测风系统包括:超声波测风传感器、位置传感器和数据处理器,其中:所述超声波测风传感器安装在叶轮的导流罩上;所述位置传感器安装在任一与叶轮同步旋转的位置上;所述数据处理器分别与所述超声波测风传感器和所述位置传感器相连,用于获取所述超声波测风传感器和所述位置传感器测量得到的数据,并根据获取到的数据确定所述超声波测风传感器实时位置上的风向和风速大小,测风结果能够更真实地反映风力发电机组周围的风向和风速大小。

一种测风系统、测风控制方法及相关设备.pdf
本发明公开了一种测风系统、测风控制方法及相关设备。该系统包括:底座;第一滑动装置,上述第一滑动装置包括第一滑块和第一滑轨,上述第一滑轨与上述底座连接;第二滑动装置,上述第二滑动装置包括第二滑块和第二滑轨,上述第二滑轨与上述第一滑块连接,上述第一滑动装置与上述第二滑动装置的布置方向不同;测风组件,上述测风组件与上述第二滑块固定连接。本申请实施例提出的测风系统,通过设置在不同方向上的第一滑动装置和第二滑动装置,可以带动测风组件在目标区域内以扫掠的方式测量来风,提供了一种可以以扫掠方式监控目标区域内的风速的测风
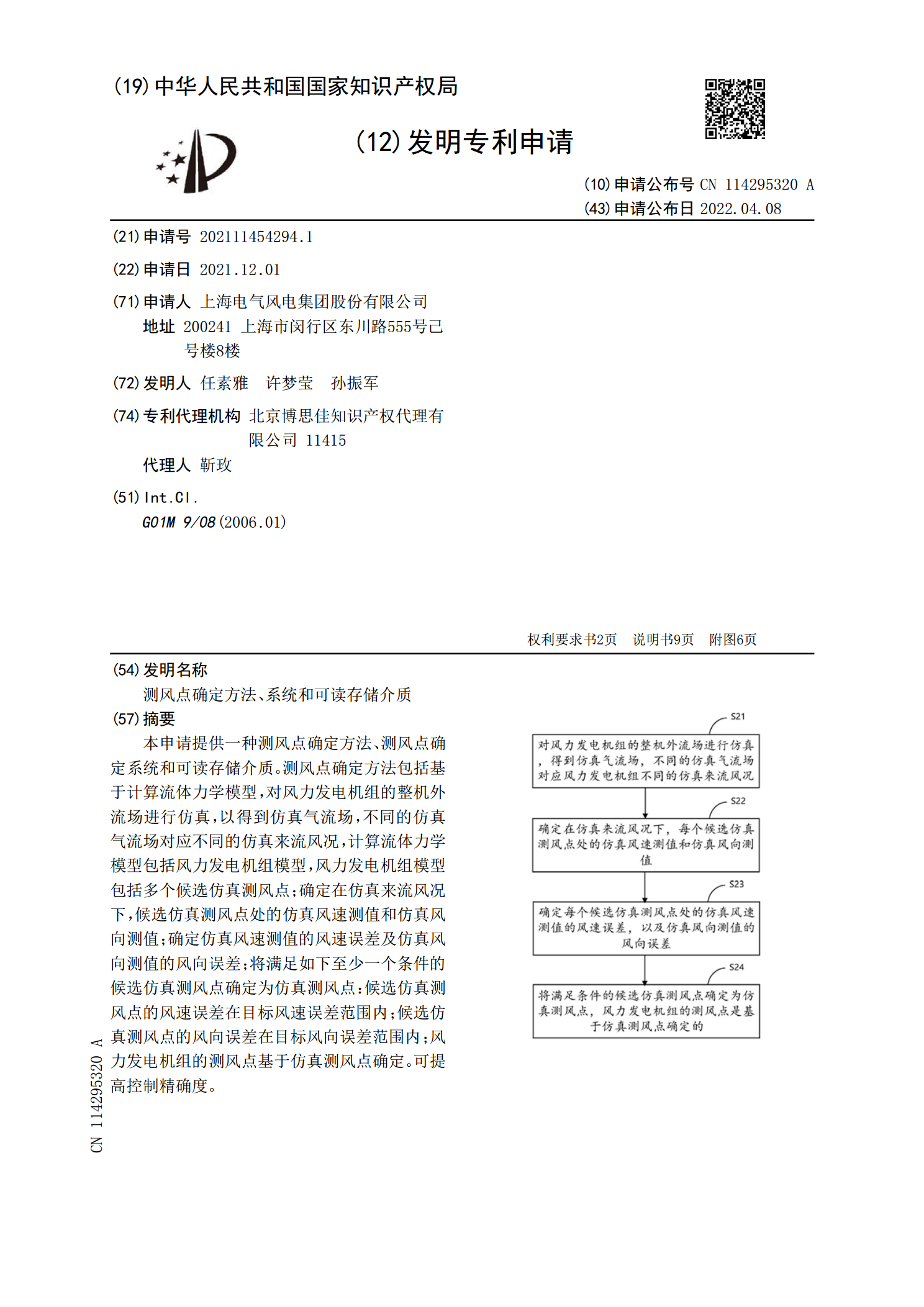
测风点确定方法、系统和可读存储介质.pdf
本申请提供一种测风点确定方法、测风点确定系统和可读存储介质。测风点确定方法包括基于计算流体力学模型,对风力发电机组的整机外流场进行仿真,以得到仿真气流场,不同的仿真气流场对应不同的仿真来流风况,计算流体力学模型包括风力发电机组模型,风力发电机组模型包括多个候选仿真测风点;确定在仿真来流风况下,候选仿真测风点处的仿真风速测值和仿真风向测值;确定仿真风速测值的风速误差及仿真风向测值的风向误差;将满足如下至少一个条件的候选仿真测风点确定为仿真测风点:候选仿真测风点的风速误差在目标风速误差范围内;候选仿真测风点的

一种风电偏航系统及其控制方法.pdf
本发明属于风力发动机的控制技术领域,具体涉及一种风电偏航系统及其控制方法。当风机处于偏航控制时,根据检测到风速风向数据控制偏航驱动电机和偏航阻尼电机,其中偏航阻尼电机包括有驱动状态和阻尼状态;判断当前驱动力是否满足要求,若不满足,则将其中至少一个偏航阻尼电机从阻尼状态切换到驱动状态,直至过载告警消失或所有偏航阻尼电机切换为偏航驱动模式;判断当前阻尼力是否满足要求,若不满足,则调大电磁阻尼电流的参数,以增大偏航阻尼电机输出的电磁力矩,直至电磁阻尼电流的参数调整为上限值。使机组能够满足驱动力或阻尼力不足时的工
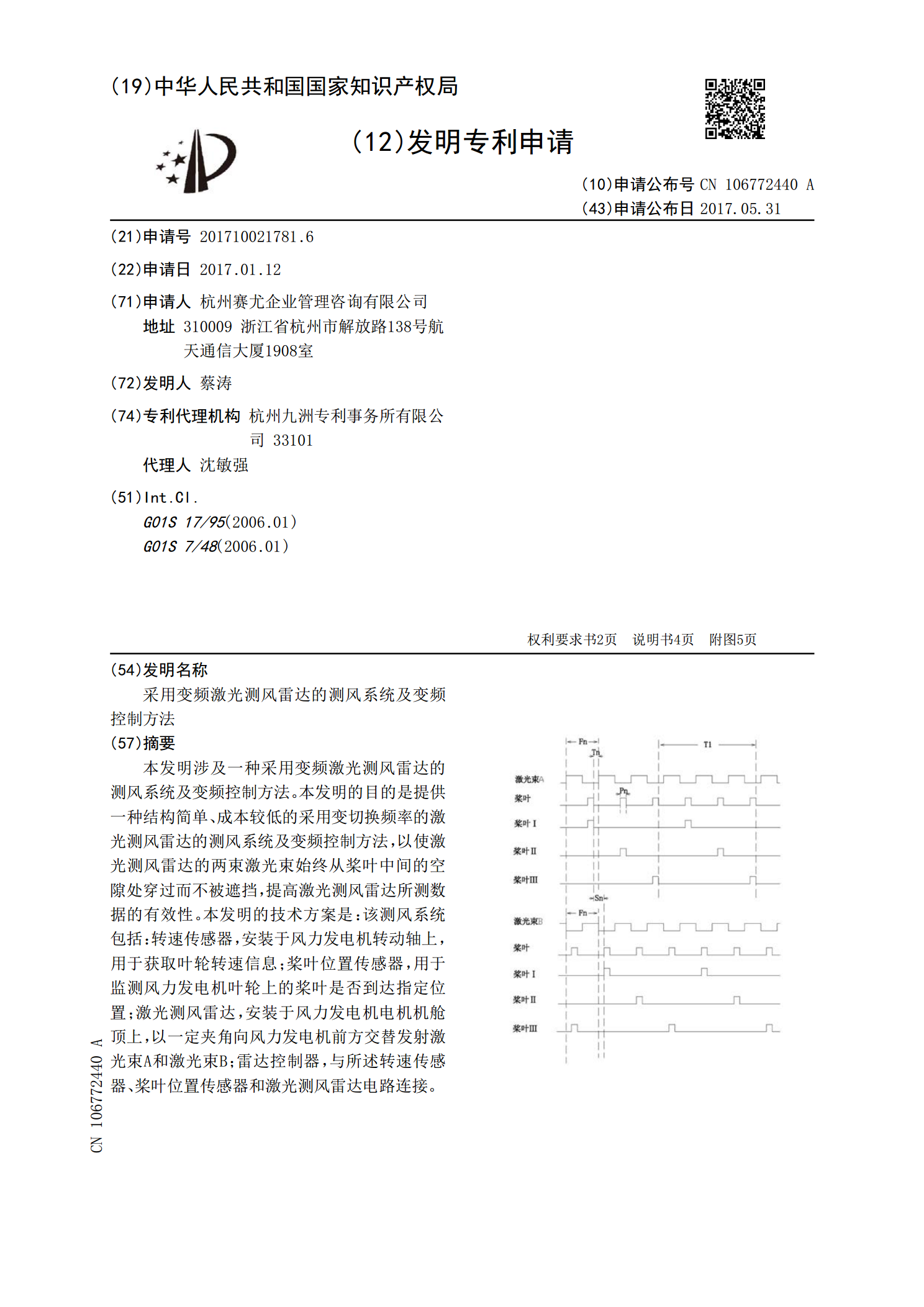
采用变频激光测风雷达的测风系统及变频控制方法.pdf
本发明涉及一种采用变频激光测风雷达的测风系统及变频控制方法。本发明的目的是提供一种结构简单、成本较低的采用变切换频率的激光测风雷达的测风系统及变频控制方法,以使激光测风雷达的两束激光束始终从桨叶中间的空隙处穿过而不被遮挡,提高激光测风雷达所测数据的有效性。本发明的技术方案是:该测风系统包括:转速传感器,安装于风力发电机转动轴上,用于获取叶轮转速信息;桨叶位置传感器,用于监测风力发电机叶轮上的桨叶是否到达指定位置;激光测风雷达,安装于风力发电机电机机舱顶上,以一定夹角向风力发电机前方交替发射激光束A和激光束