
基于精英人工鱼群的植保无人机编队航迹规划方法.pdf

海昌****姐淑

1/7
2/7

3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于精英人工鱼群的植保无人机编队航迹规划方法.pdf
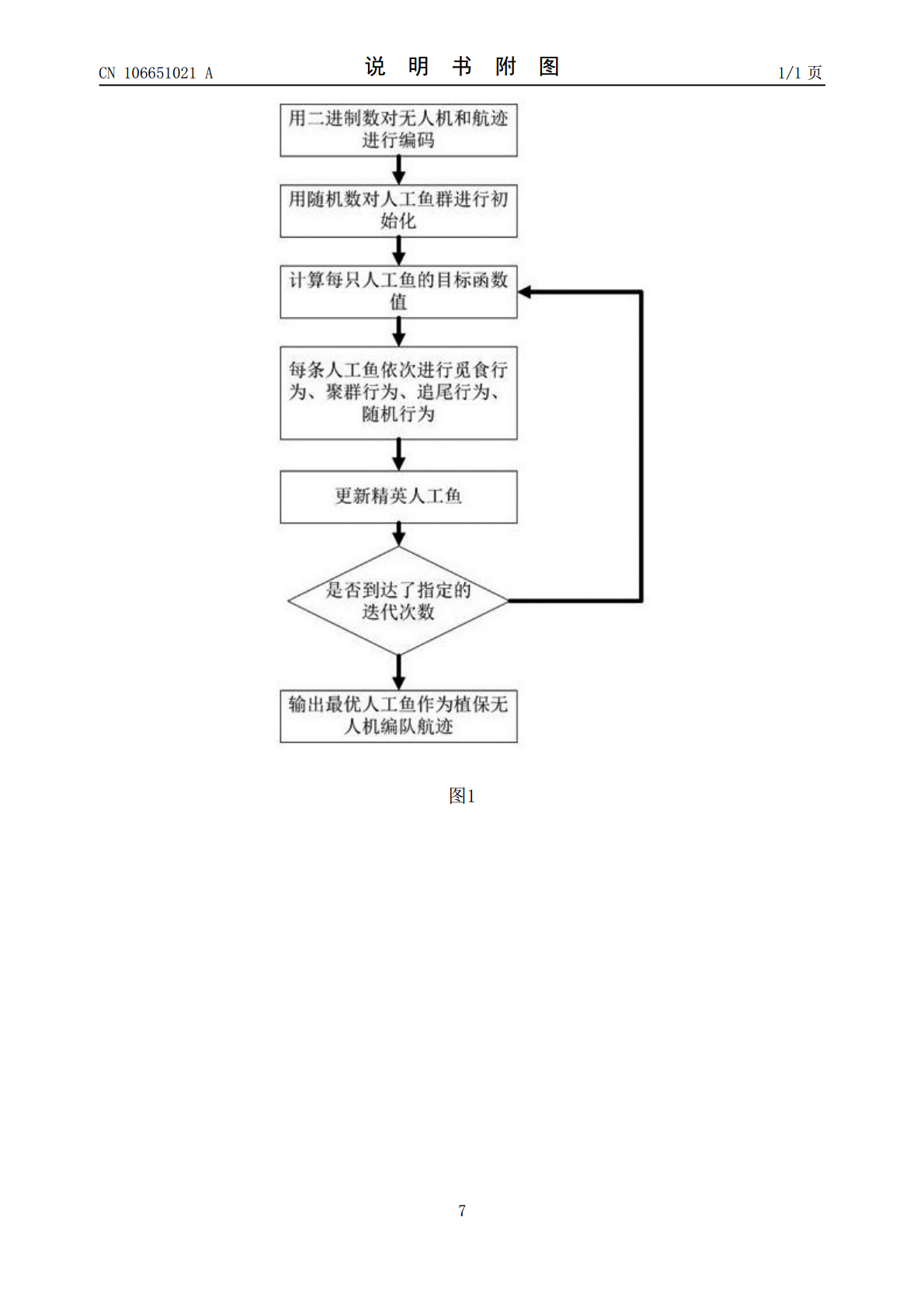
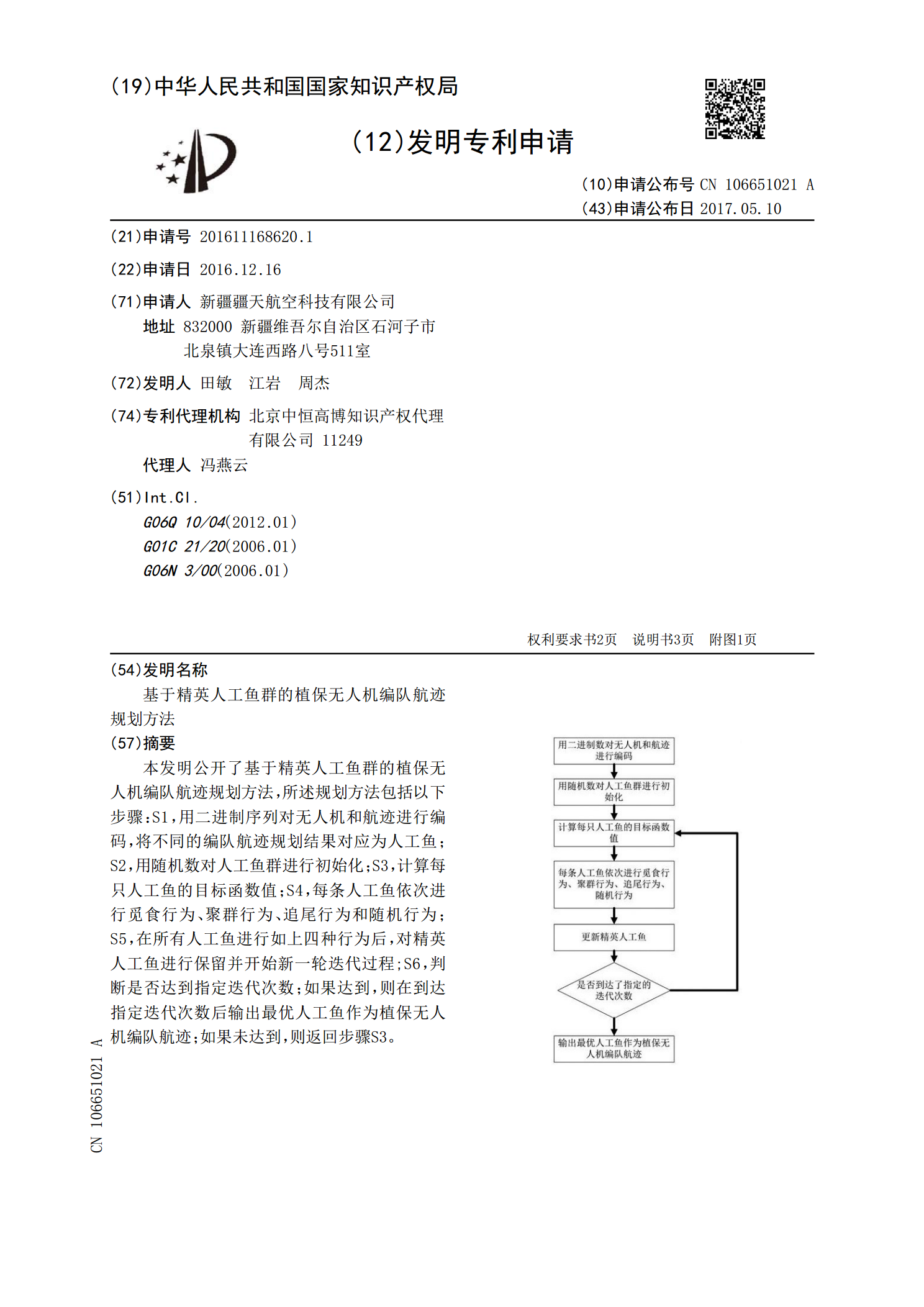
本发明公开了基于精英人工鱼群的植保无人机编队航迹规划方法,所述规划方法包括以下步骤:S1,用二进制序列对无人机和航迹进行编码,将不同的编队航迹规划结果对应为人工鱼;S2,用随机数对人工鱼群进行初始化;S3,计算每只人工鱼的目标函数值;S4,每条人工鱼依次进行觅食行为、聚群行为、追尾行为和随机行为;S5,在所有人工鱼进行如上四种行为后,对精英人工鱼进行保留并开始新一轮迭代过程;S6,判断是否达到指定迭代次数;如果达到,则在到达指定迭代次数后输出最优人工鱼作为植保无人机编队航迹;如果未达到,则返回步骤S3。

基于定位精度的无人机编队航迹规划方法.pdf
本发明提供基于定位精度的无人机编队航迹规划方法,包括初步规划和精确规划,初步规划是通过传统启发式算法,考虑无人机飞行过程中的安全性和无人机运动学限制,设置合适的步长对主机进行航迹规划;初步规划生成主机的航迹,并记录主机在每个步长结束时的位置,作为精确规划时需要运算的航迹点;精确规划通过多目标粒子群寻优算法,针对初步规划的主机航迹点运算出从机在安全性、定位精度、路程长度为综合代价并满足无人机最大通信距离、最小防碰撞距离限制的最优航迹。本发明的优势是算法定位精度高、运行时间短。

基于梯田环境下的植保无人机航迹规划算法研究.docx
基于梯田环境下的植保无人机航迹规划算法研究随着无人机技术的不断发展,植保无人机已经成为了现代农业生产必不可少的一部分。植保无人机通过空中喷洒农药等手段,可以实现对农田的高效治理,提高农田的产量和质量。但是,在梯田等特殊地形下,植保无人机的航迹规划面临很多挑战,因此本文将介绍基于梯田环境下的植保无人机航迹规划算法研究。一、梯田环境下的无人机航迹规划特点梯田农业是一种传统的高产农业形式,其地形布局独特,有大量的阶地和坡地,地形复杂且高低差大,因此在梯田环境下进行无人机航迹规划需要考虑以下几个方面:1.地形障碍

无人机编队航迹规划与智能控制方法研究的任务书.docx
无人机编队航迹规划与智能控制方法研究的任务书一、课题背景随着无人机技术的不断发展,无人机已经广泛应用于军事、民用、科研等领域。无人机编队飞行是多无人机协同作战中的重要技术之一,也是无人机技术应用的重要方向之一。在现代无人机编队中,无人机航迹规划和智能控制是至关重要的技术,能够实现无人机的保持距离、实现编队任务等,为无人机编队飞行提供技术保障。二、研究内容本课题旨在研究无人机编队航迹规划与智能控制方法,具体包括以下内容:1.基于多智能体系统的航迹规划算法研究,主要研究无人机航迹规划的算法,实现无人机编队飞行

结合滚动时域的无人机编队航迹规划研究.docx
结合滚动时域的无人机编队航迹规划研究滚动时域的无人机编队航迹规划研究引言:随着无人机技术的快速发展,无人机编队技术得到了广泛的研究和应用。无人机编队可以实现多个无人机之间的协同作战和任务执行,提高作战效能和任务完成能力。因此,无人机编队的航迹规划成为无人机编队技术的重要研究领域。然而,传统的航迹规划方法往往只考虑空域方案,而没有考虑时间域的因素。因此,滚动时域的无人机编队航迹规划研究具有重要的理论意义和实践价值。一、无人机编队的航迹规划问题无人机编队的航迹规划问题可以简单概括为确定无人机的轨迹和作战路径,