
一种光场相机微透镜阵列几何参数的标定方法.pdf

一只****爱敏


1/8
2/8

3/8
4/8
5/8

6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种光场相机微透镜阵列几何参数的标定方法.pdf
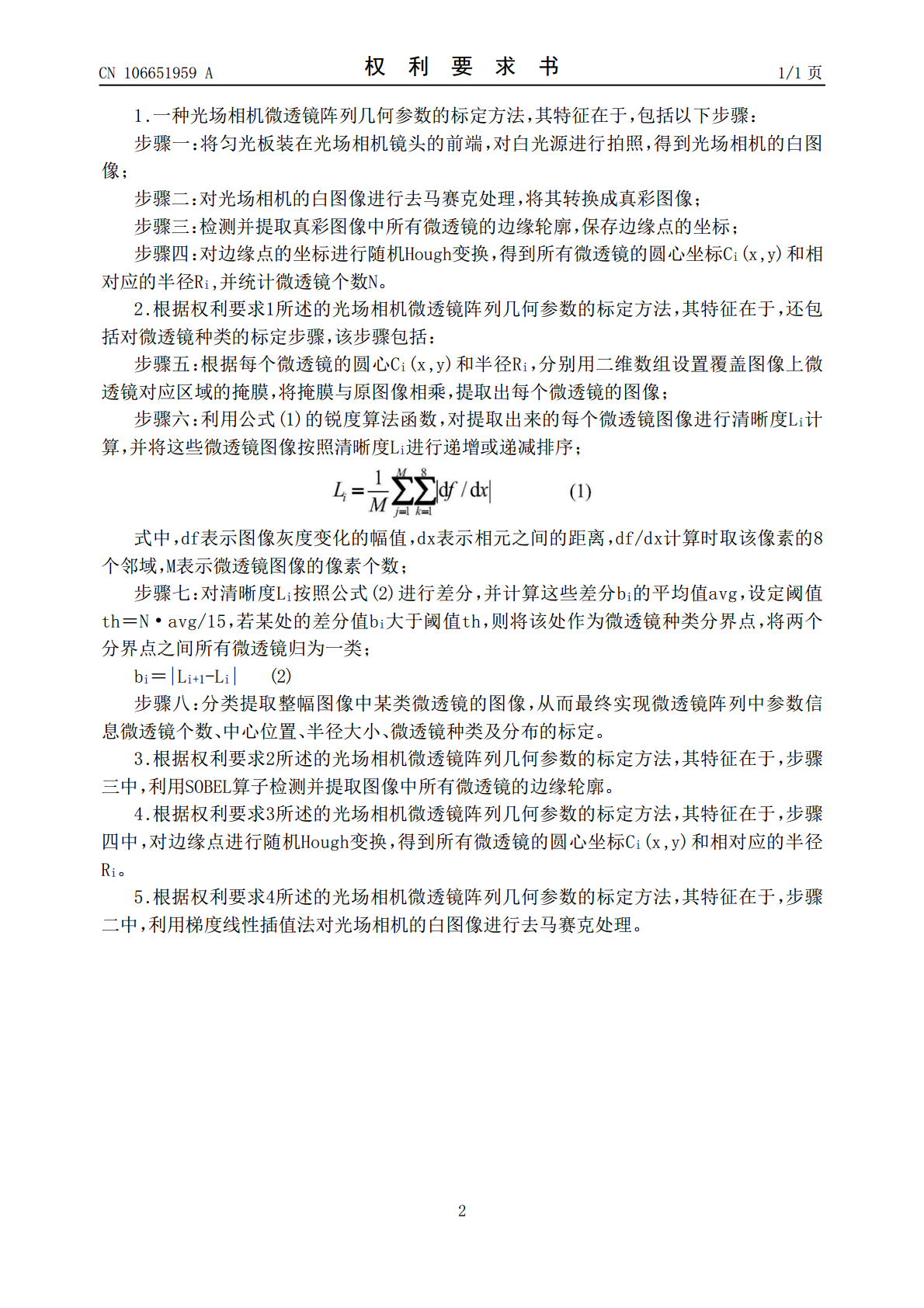
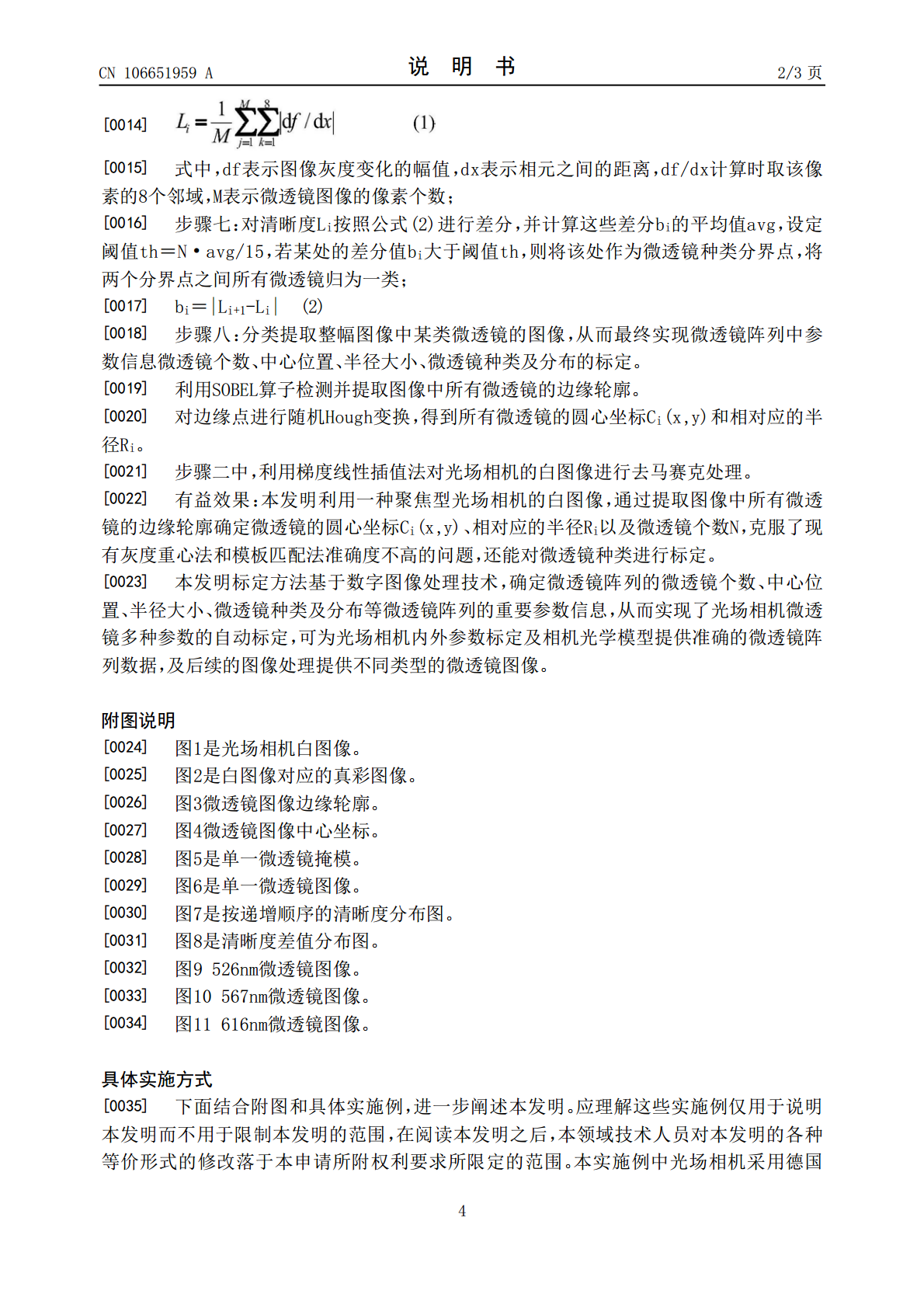
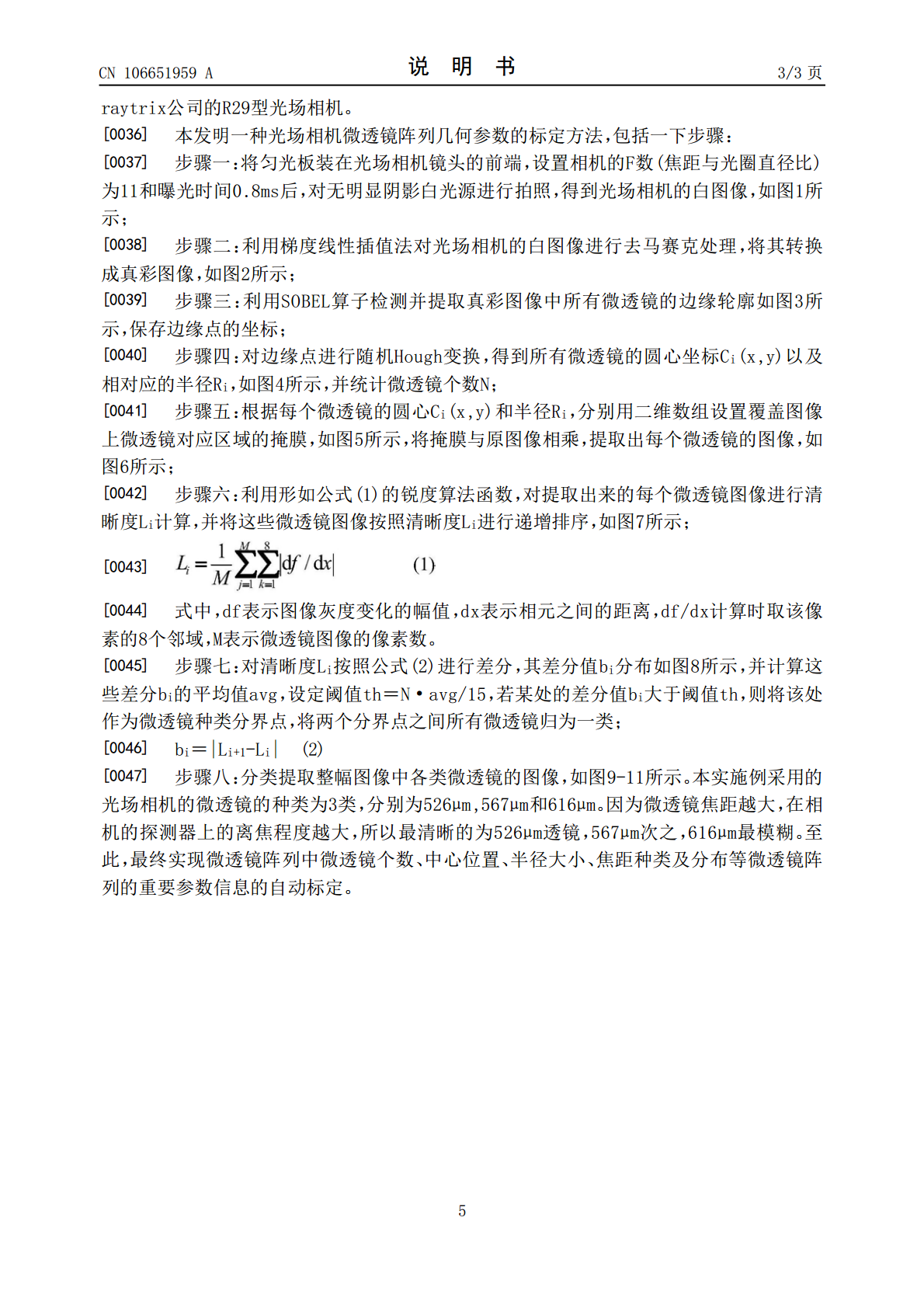
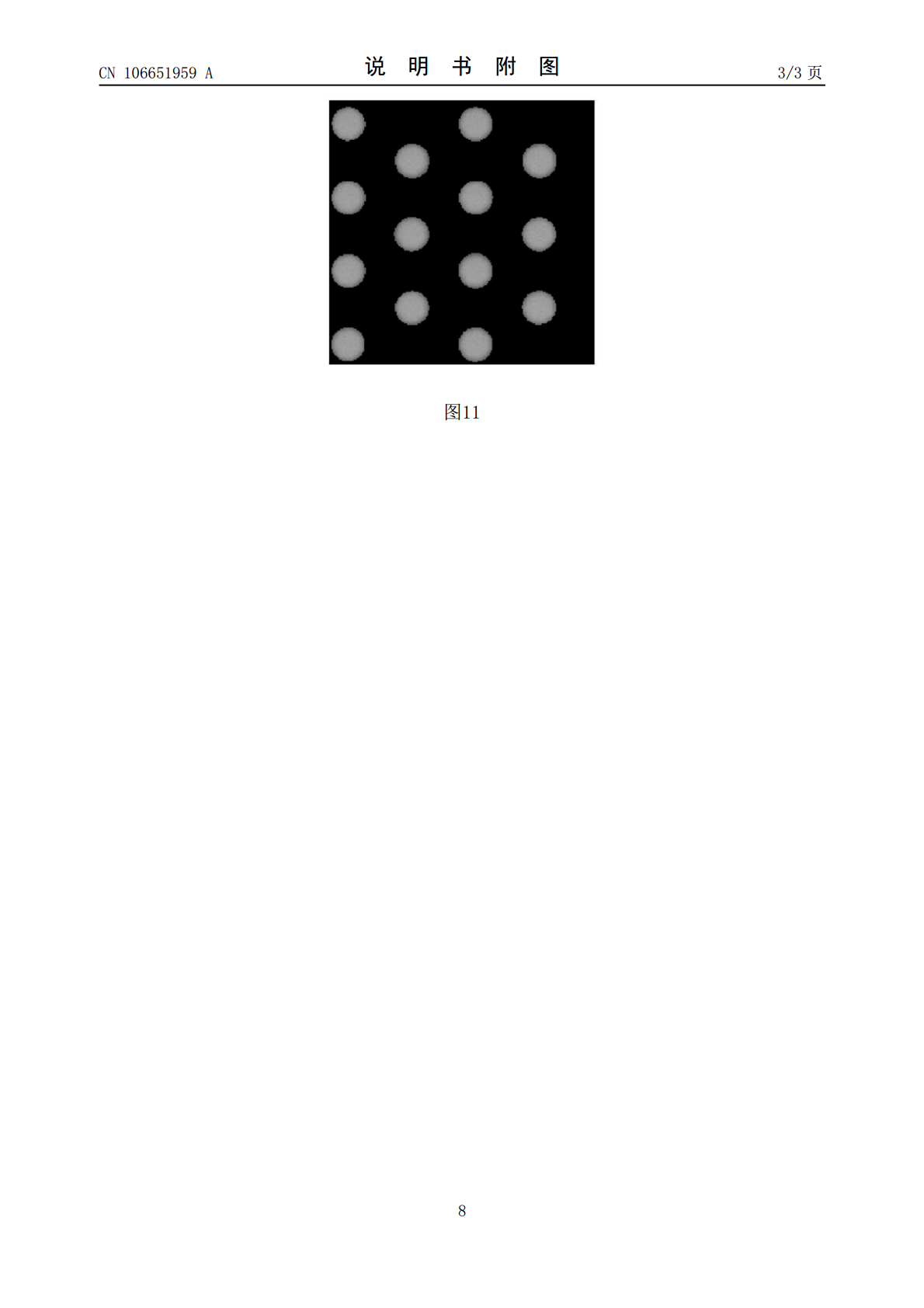
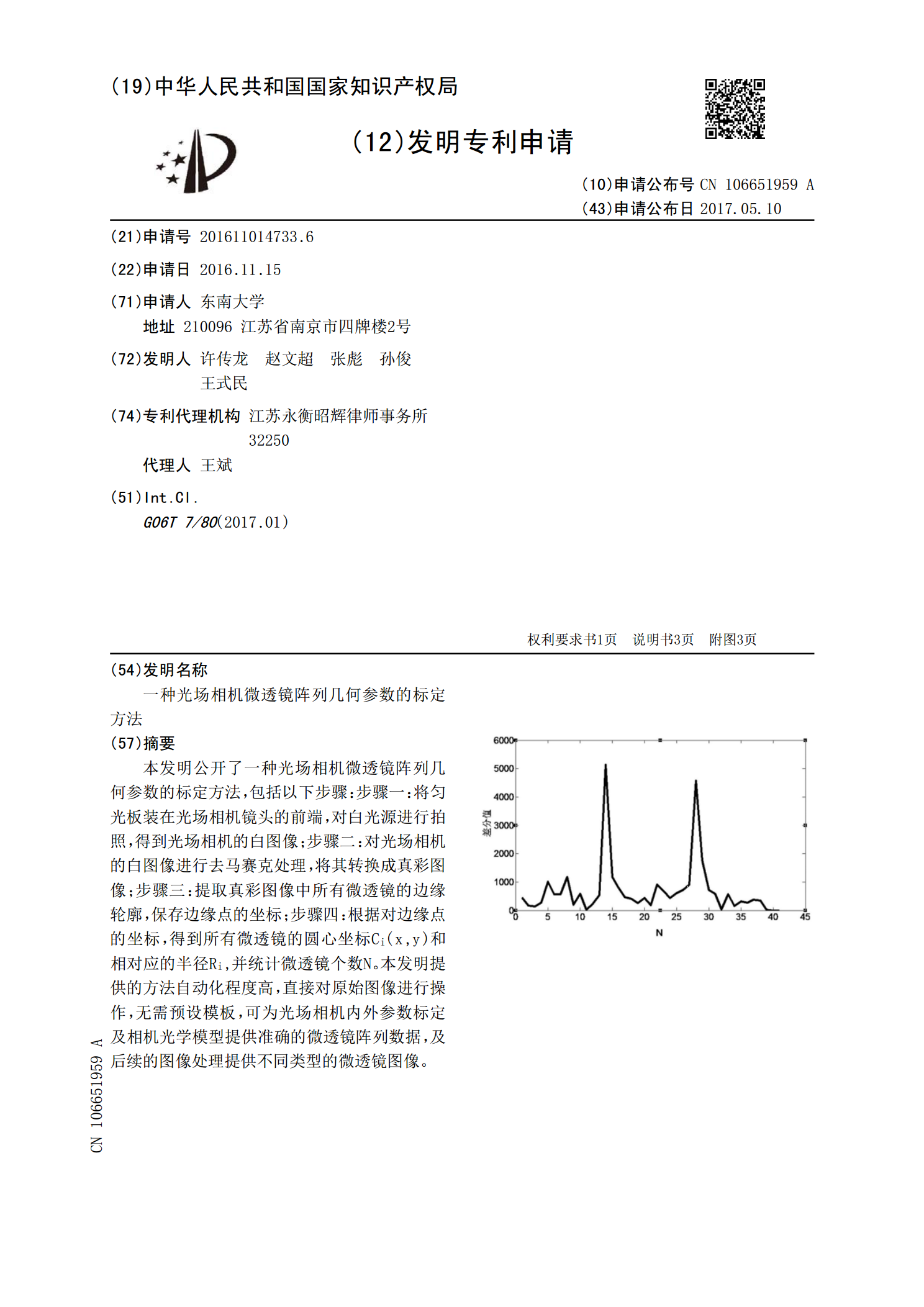
本发明公开了一种光场相机微透镜阵列几何参数的标定方法,包括以下步骤:步骤一:将匀光板装在光场相机镜头的前端,对白光源进行拍照,得到光场相机的白图像;步骤二:对光场相机的白图像进行去马赛克处理,将其转换成真彩图像;步骤三:提取真彩图像中所有微透镜的边缘轮廓,保存边缘点的坐标;步骤四:根据对边缘点的坐标,得到所有微透镜的圆心坐标C

基于微透镜阵列合成孔径的光场相机去遮挡系统和方法.pdf
本发明提供了基于微透镜阵列合成孔径的光场相机去遮挡系统和方法,采用微透镜阵列和合成孔径技术,提高了图像的角分辨率和光通量,通过目标场景内遮挡物进行数字对焦,对遮挡物的数据进行了高精度的识别和去除,实现了对目标场景中被遮挡物体的还原显现,从而提高了图像的信噪比和图像清晰度;在保证遮挡物识别高准确度的前提下,实现了提高目标图像的图像质量和系统的可靠性的功能。本发明提供了高对比度和高信噪比的去除遮挡物信息的三维场景信息光场图像,并可根据需要将该系统视频化进一步处理,通过三维测量进行数字化改造,在医疗检测信息化、

一种光场相机的盲标定方法.pdf
本发明公开了一种光场相机的盲标定方法,包括:在主透镜与传感器之间插入微透镜阵列以搭建初始的光场相机2.0结构,并分别测量主透镜和微透镜阵列分别与测量起始面的初始距离;固定传感器以及微透镜阵列的位置,向远离微透镜阵列的方向移动主透镜,并实时记录传感器采集的图像;测量依照光场相机1.0结构清晰成像时主透镜与测量起始面之间的距离;根据主透镜和微透镜阵列分别与测量起始面的初始距离、以及依照光场相机1.0结构清晰成像时主透镜与测量起始面之间的距离,建立光场相机2.0结构的盲标定模型,计算得到微透镜阵列的结构参数,并
一种光场相机的快速盲标定方法.pdf
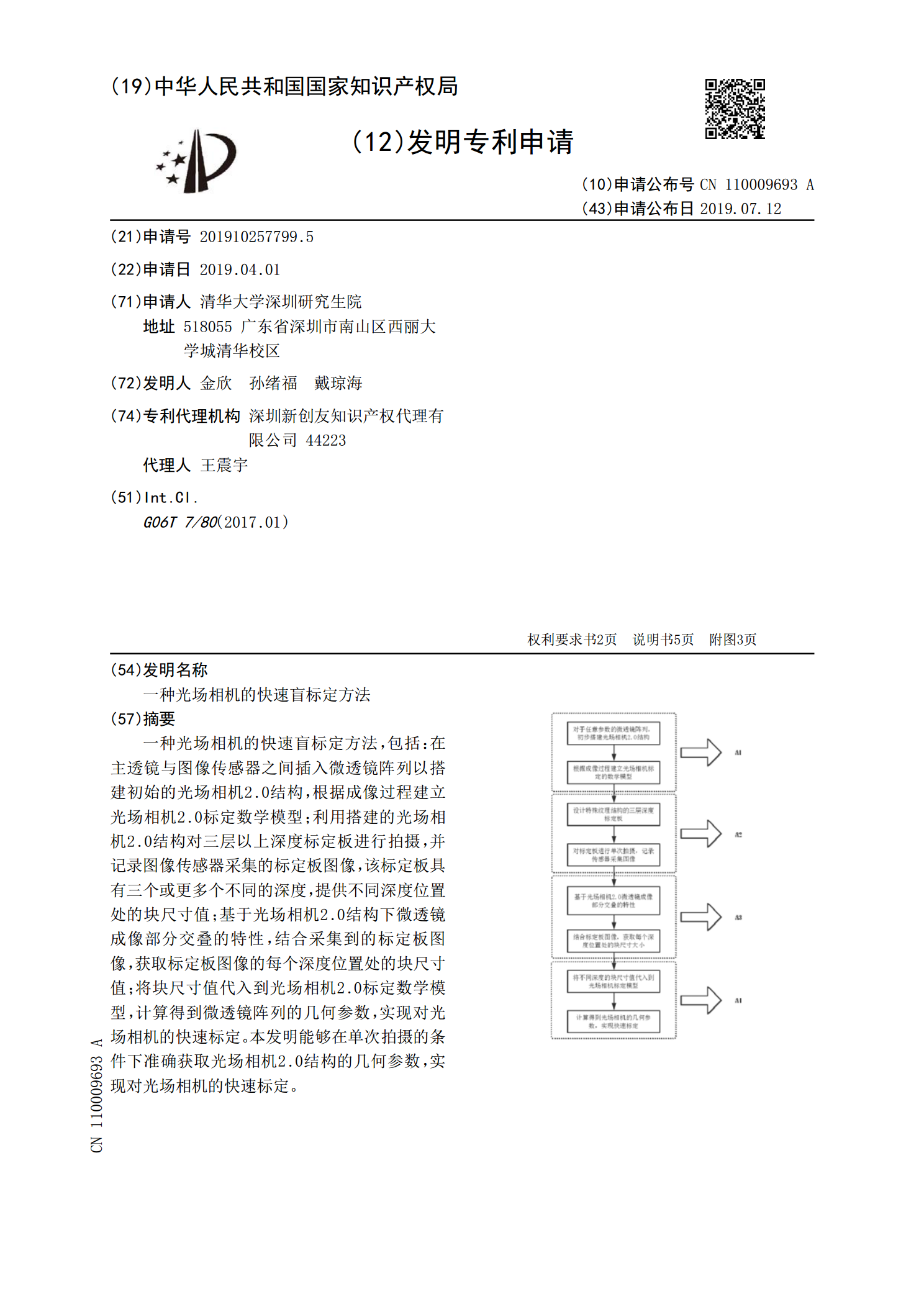
一种光场相机的快速盲标定方法,包括:在主透镜与图像传感器之间插入微透镜阵列以搭建初始的光场相机2.0结构,根据成像过程建立光场相机2.0标定数学模型;利用搭建的光场相机2.0结构对三层以上深度标定板进行拍摄,并记录图像传感器采集的标定板图像,该标定板具有三个或更多个不同的深度,提供不同深度位置处的块尺寸值;基于光场相机2.0结构下微透镜成像部分交叠的特性,结合采集到的标定板图像,获取标定板图像的每个深度位置处的块尺寸值;将块尺寸值代入到光场相机2.0标定数学模型,计算得到微透镜阵列的几何参数,实现对光场相

基于微透镜阵列的光场成像系统.docx
基于微透镜阵列的光场成像系统基于微透镜阵列的光场成像系统摘要:光场成像是一种旨在捕捉并重构光场的新兴成像技术,该技术可以用于在不同焦距、景深和视角下获取三维信息。微透镜阵列是一种常见的光学元件,其结构简单,制作成本低廉,适用于构建高分辨率、高灵敏度的光场成像系统。本文介绍了基于微透镜阵列的光场成像系统的原理、结构以及相关设计和实现细节。首先,我们将介绍光场成像的基本原理,包括光场的定义、表示和重构方法。然后,我们详细介绍了微透镜阵列的结构和工作原理,以及其在光场成像中的应用。接着,我们将探讨微透镜阵列光场