
车牌识别方法及系统.pdf

书生****文章

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车牌识别方法及系统.pdf
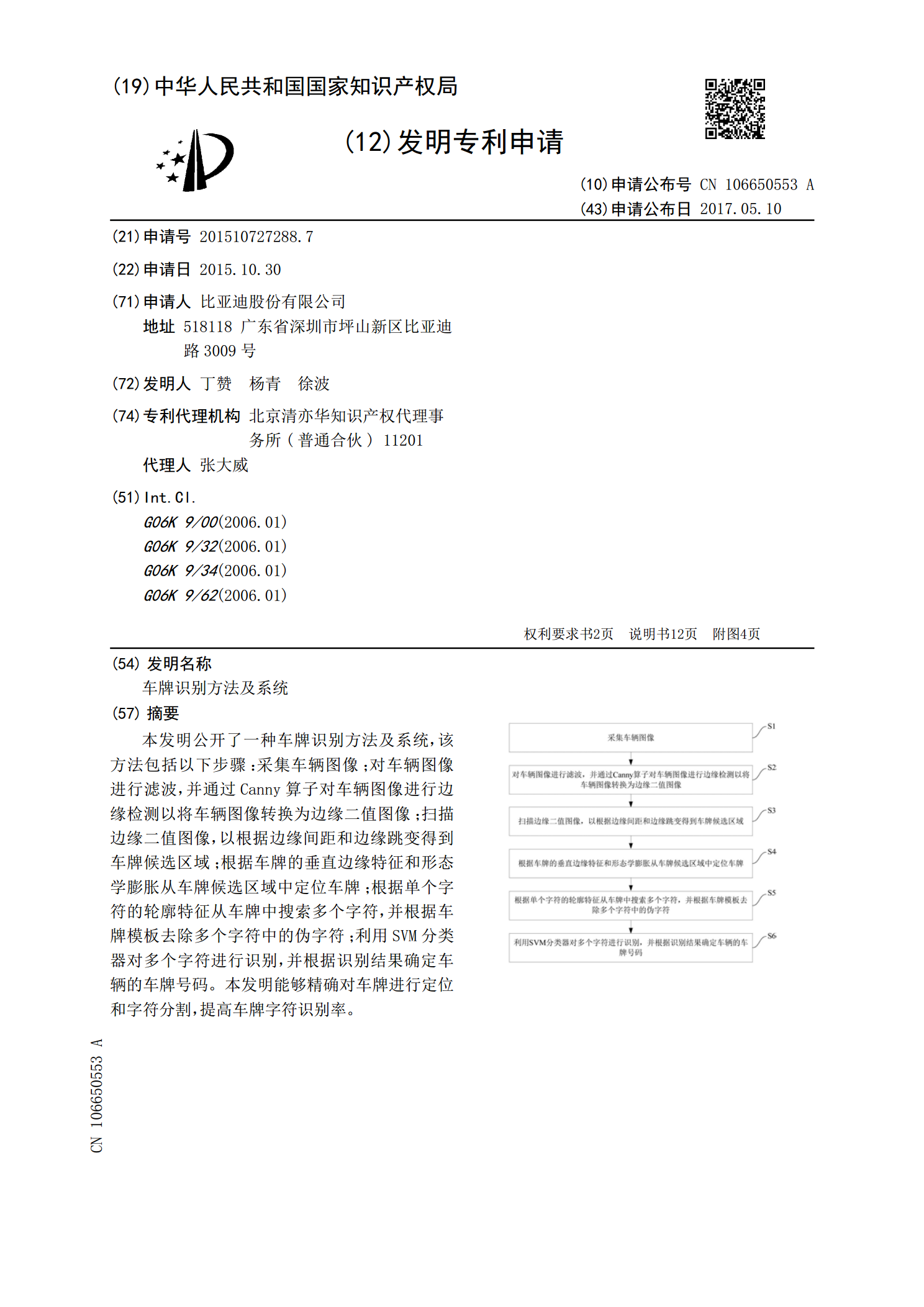
本发明公开了一种车牌识别方法及系统,该方法包括以下步骤:采集车辆图像;对车辆图像进行滤波,并通过Canny算子对车辆图像进行边缘检测以将车辆图像转换为边缘二值图像;扫描边缘二值图像,以根据边缘间距和边缘跳变得到车牌候选区域;根据车牌的垂直边缘特征和形态学膨胀从车牌候选区域中定位车牌;根据单个字符的轮廓特征从车牌中搜索多个字符,并根据车牌模板去除多个字符中的伪字符;利用SVM分类器对多个字符进行识别,并根据识别结果确定车辆的车牌号码。本发明能够精确对车牌进行定位和字符分割,提高车牌字符识别率。
车牌识别方法、装置和系统.pdf
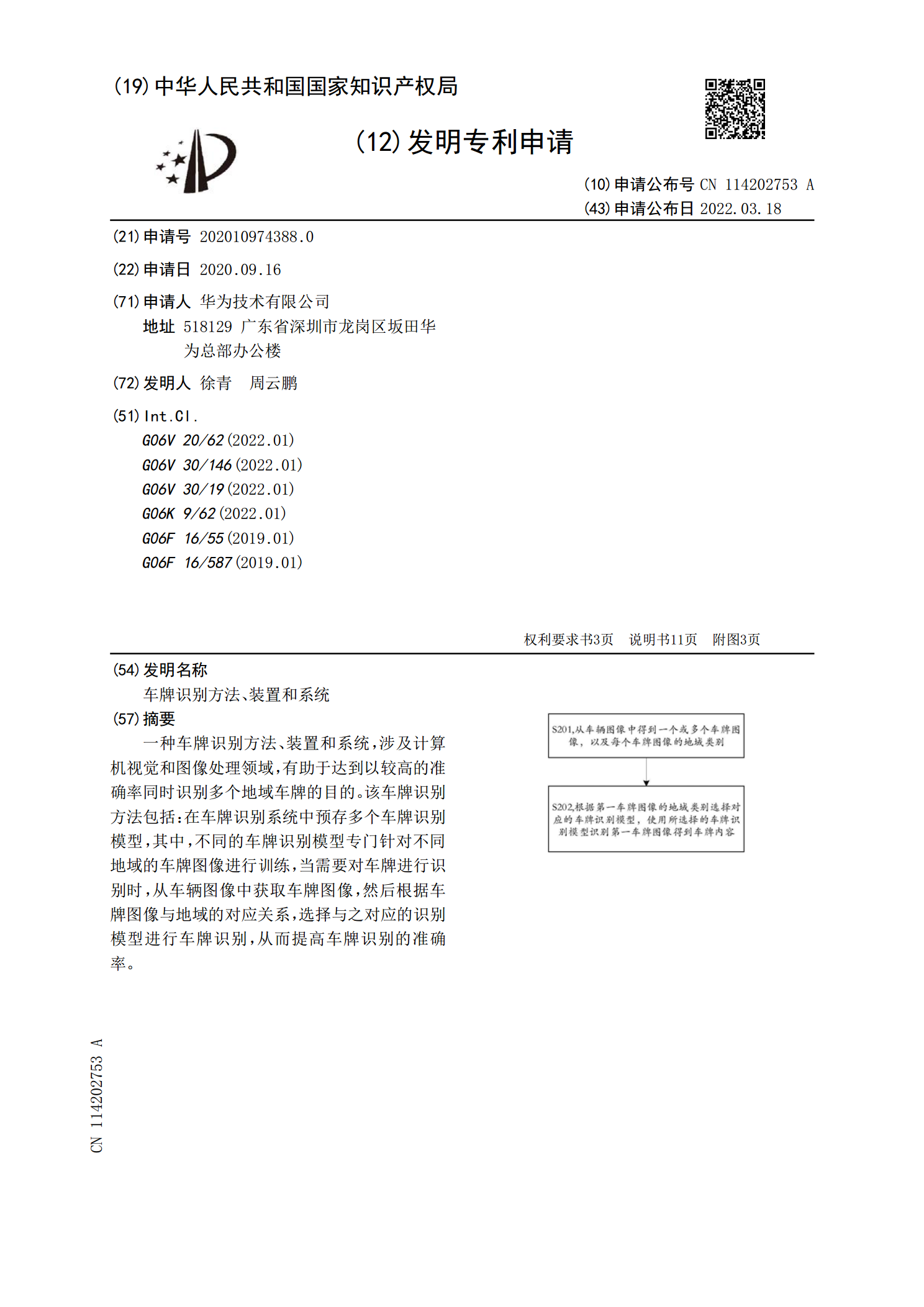
一种车牌识别方法、装置和系统,涉及计算机视觉和图像处理领域,有助于达到以较高的准确率同时识别多个地域车牌的目的。该车牌识别方法包括:在车牌识别系统中预存多个车牌识别模型,其中,不同的车牌识别模型专门针对不同地域的车牌图像进行训练,当需要对车牌进行识别时,从车辆图像中获取车牌图像,然后根据车牌图像与地域的对应关系,选择与之对应的识别模型进行车牌识别,从而提高车牌识别的准确率。

车牌识别方法.pdf
本发明提供了一种车牌识别方法。其包括:对监控范围内的过往车辆进行拍摄,获得车牌图像;对车牌图像进行预处理,获得车牌的二值化图像;对二值化图像进行垂直边缘的检测,对二值化图像进行车牌区域的粗定位,最后进行车牌区域的精确定位;将车牌区域的边框去除,利用垂直投影方法将车牌区域分割为车牌字符;检测分割出的车牌字符是否与上一已识别车牌获得的车牌字符相同;对于相同的采用车牌字符,则调用上一已识别车牌获得的车牌字符识别结果,对于不相同的采用车牌字符,将所述车牌字符进行归一化处理,然后提取车牌字符的轮廓特征、投影特征,将
一种机动车牌接力识别系统及车牌接力识别方法.pdf
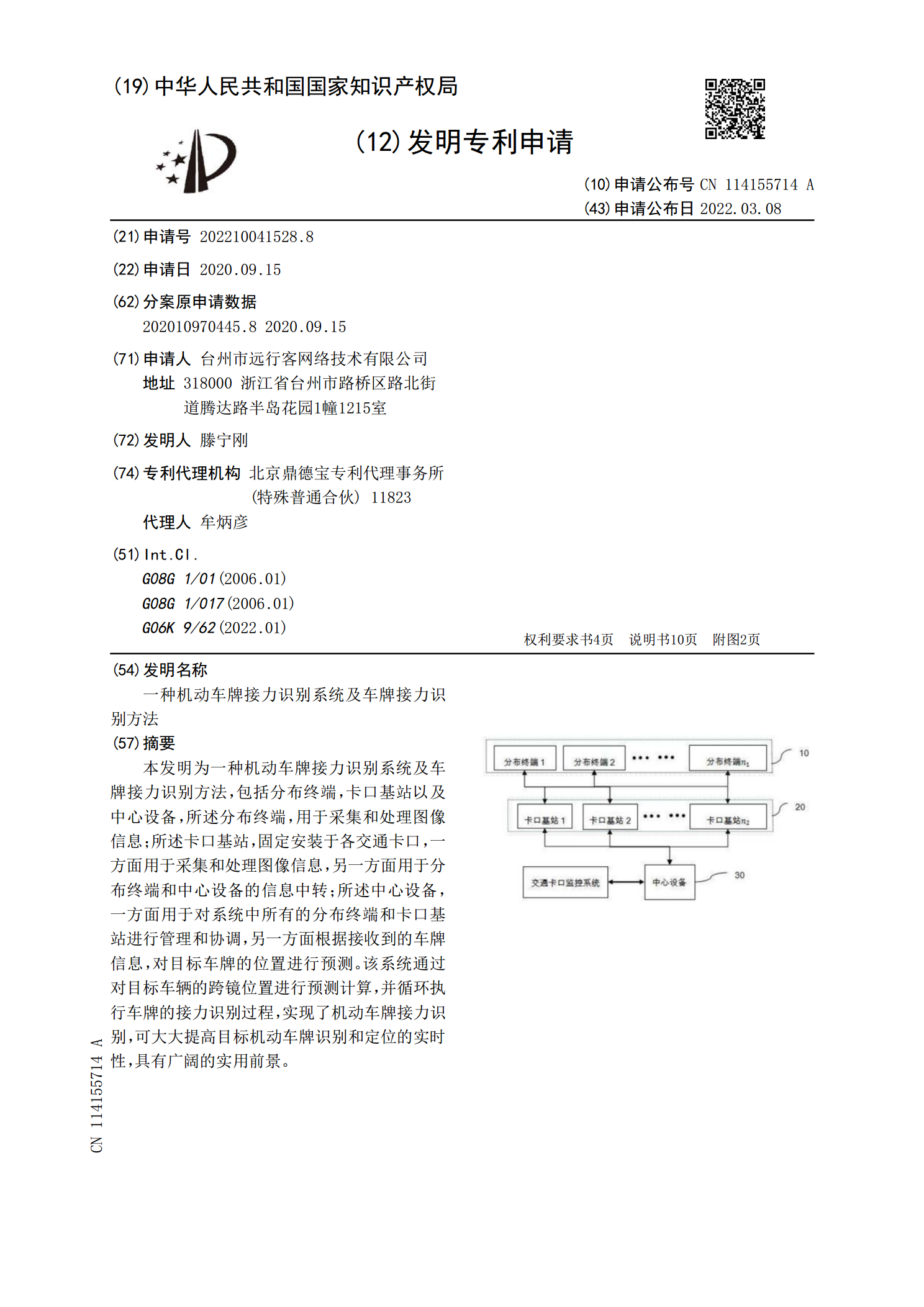
本发明为一种机动车牌接力识别系统及车牌接力识别方法,包括分布终端,卡口基站以及中心设备,所述分布终端,用于采集和处理图像信息;所述卡口基站,固定安装于各交通卡口,一方面用于采集和处理图像信息,另一方面用于分布终端和中心设备的信息中转;所述中心设备,一方面用于对系统中所有的分布终端和卡口基站进行管理和协调,另一方面根据接收到的车牌信息,对目标车牌的位置进行预测。该系统通过对目标车辆的跨镜位置进行预测计算,并循环执行车牌的接力识别过程,实现了机动车牌接力识别,可大大提高目标机动车牌识别和定位的实时性,具有广阔

多路网络视频流车牌识别方法及系统.pdf
本发明实施例公开了一种多路网络视频流车牌识别方法及系统,所述车牌识别方法应用于监控系统中且包括:采集解码步骤:采集多路IP摄像头分发的网络视频流,实时进行解码;并发处理步骤:采用多线程并发处理模式对图像帧数据依次进行车牌检测、字符分割及字符识别;显示分析步骤:对车牌号数据及图像帧数据进行实时渲染显示,同时接收用户的交互信息以控制渲染显示,以及对车牌号数据进行显示、分发、统计,并将统计结果保存为日志信息。本发明实施例通过检测视频中存在的车牌区域的车牌图像,并对车牌图像利用深度学习技术进行识别,获取视频中的车