
一种履带式管道机器人.pdf

是你****元呀

1/9

2/9

3/9

4/9
5/9

6/9

7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种履带式管道机器人.pdf
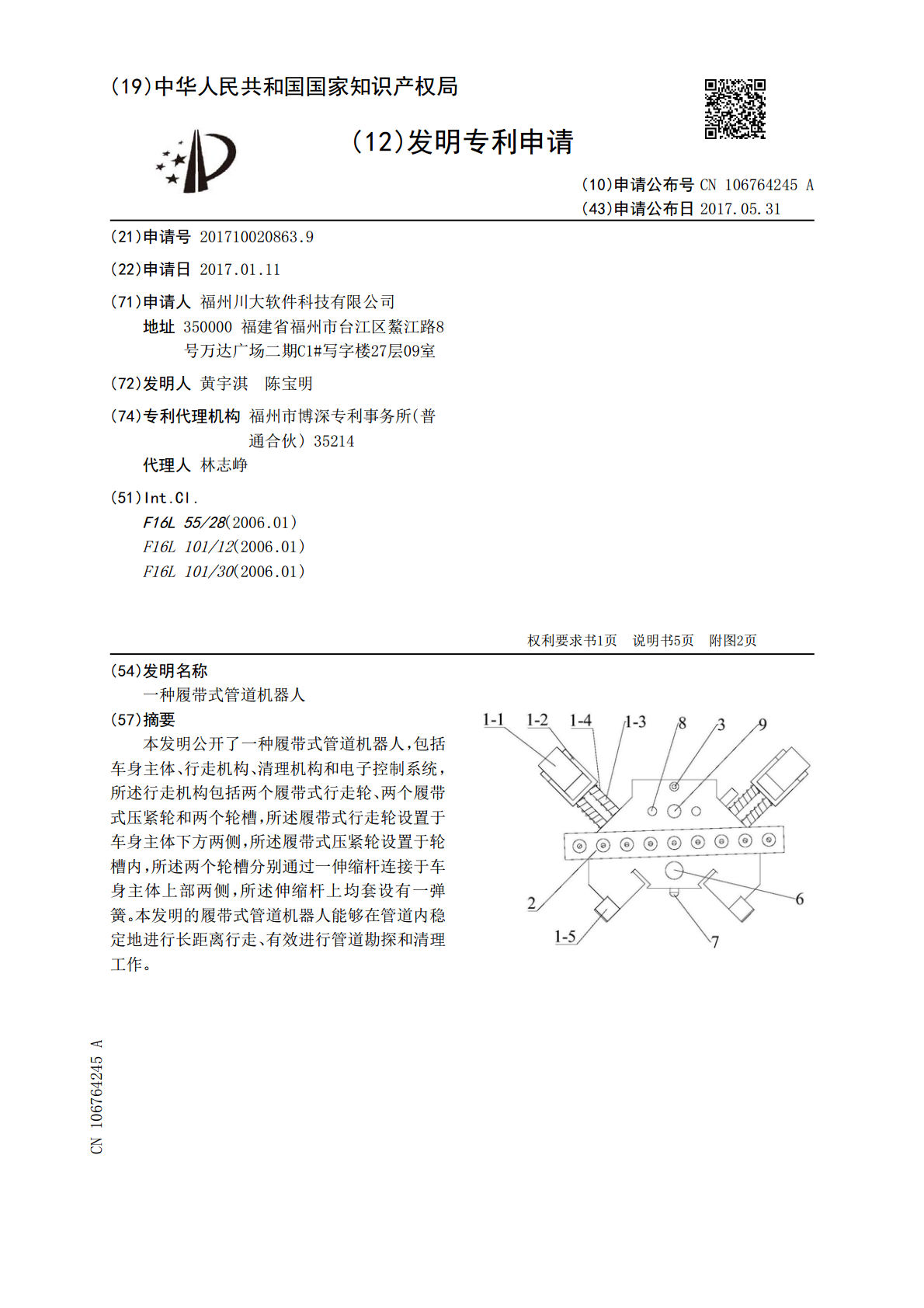
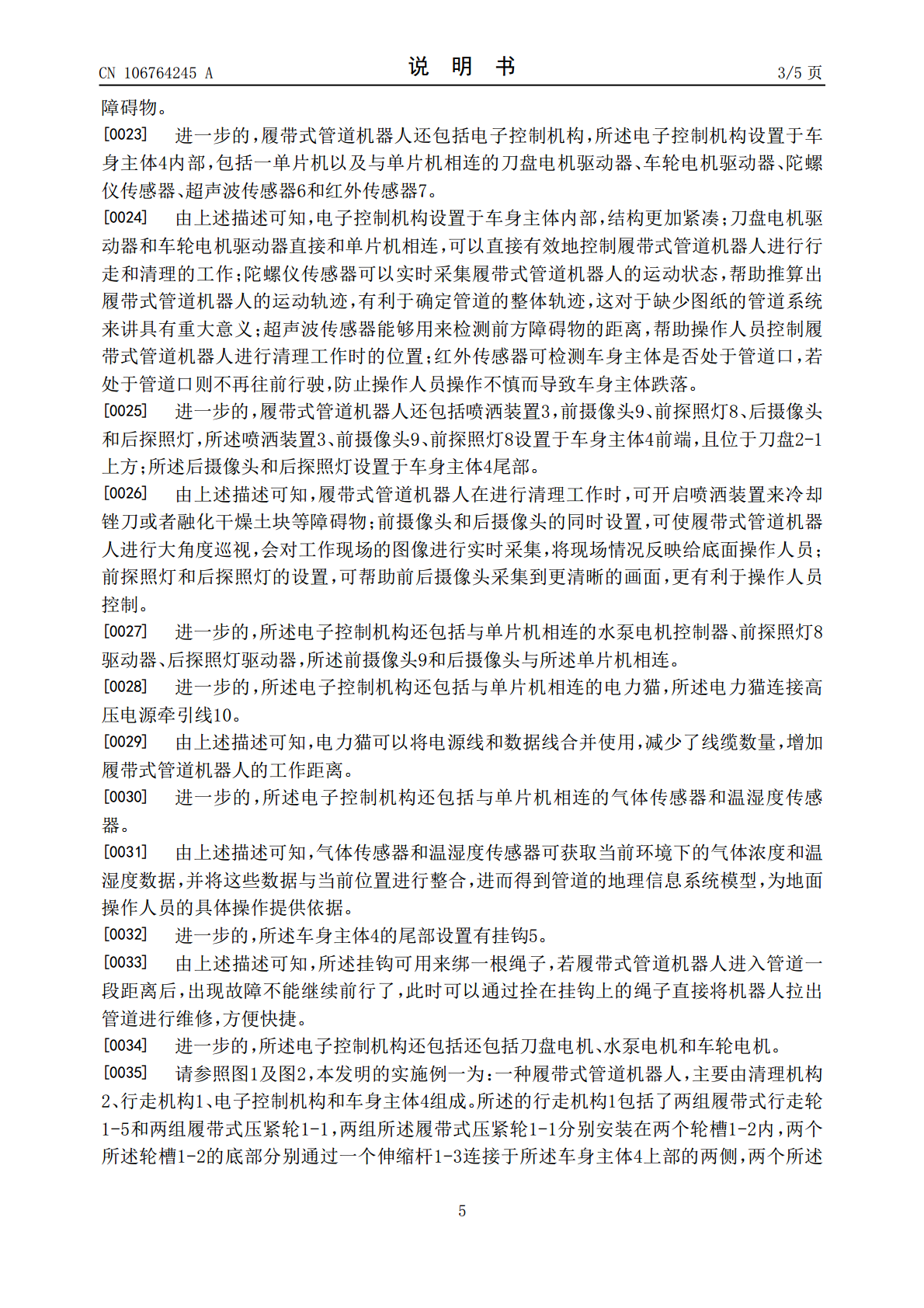
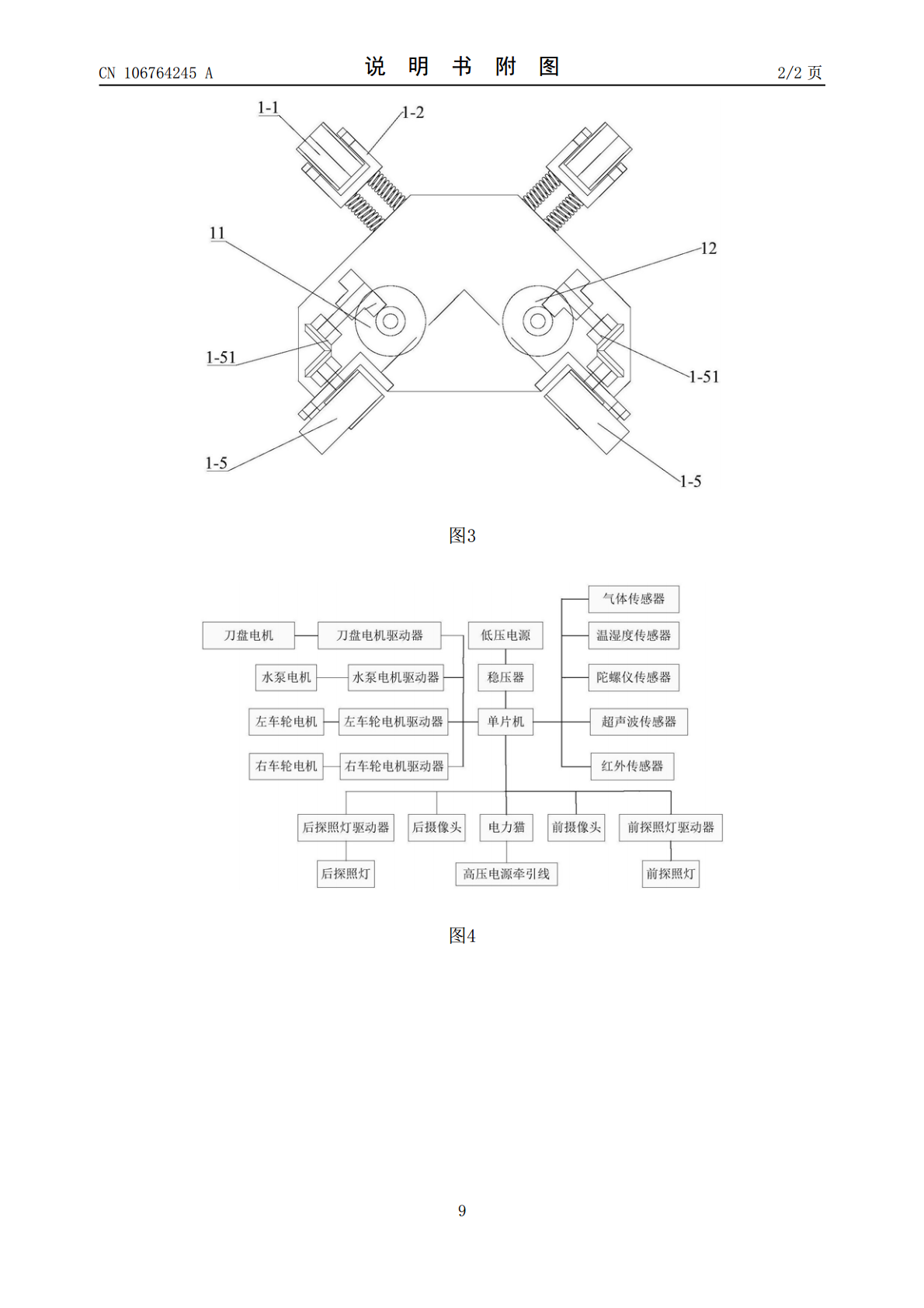
本发明公开了一种履带式管道机器人,包括车身主体、行走机构、清理机构和电子控制系统,所述行走机构包括两个履带式行走轮、两个履带式压紧轮和两个轮槽,所述履带式行走轮设置于车身主体下方两侧,所述履带式压紧轮设置于轮槽内,所述两个轮槽分别通过一伸缩杆连接于车身主体上部两侧,所述伸缩杆上均套设有一弹簧。本发明的履带式管道机器人能够在管道内稳定地进行长距离行走、有效进行管道勘探和清理工作。

一种软体履带式管道机器人.pdf
本发明公开了一种软体履带式管道机器人,它包括一个充气膨胀本体(1)和运动执行装置,运动执行装置包括驱动电机(4)和履带(5),履带(5)呈螺旋形闭合设置于充气膨胀本体(1)表面,履带(5)的下部间隔设置有多个驱动履带运动的驱动轮(6),每个驱动轮(6)均连接有一个驱动其旋转、固设于充气膨胀本体(1)上的驱动电机(4)。本发明的有益效果是:结合了履带式和螺旋式管道机器人的优点,减小了由于中间机构的传动而引起的能量损失,传动效率高,轴向牵引力大;机器人运行平稳可靠;机器人行走位置控制更加精确。

一种城市油烟管道用履带式清洁机器人.pdf
本发明公开一种城市油烟管道用履带式清洁机器人,包括车体,车体内部安装有驱动机构,车体两侧均安装有履带行进机构;车体一端安装有超声探测装置;车体上表面依次安装有摄像头、支撑轮机构、电源、微控制器、支撑轮机构和电机;电机的输出轴连接有传动轴,该传动轴一端连接有连杆;连杆两端均安装有刷体;微控制器的输入端分别与摄像头和超声探测装置相连,其输出端分别与电机和驱动机构相连,电机通过传动轴驱动连杆旋转;驱动机构用于驱动履带行进机构运转;电源分别与摄像头、微控制器、电机、超声探测装置和驱动机构相连。本发明通过设计该清洁

10论文正文 管道履带式机器人.docx
前言油气管道输送是与铁路、公路、水运、航运并列的五大运输行业之一长输油气管道作为一种特殊设备广泛应用于石油、石化、化工等工业领域以及城市燃气系统中在国民经济中占有重要地位。随着“开发大西部”以及“西气东输”的战略指导方针长输油气管道的数量在不断增加。由于历史原因国内在役长输油气管道中部分管材制管质量较差加上施工建设过程中存在部分焊接缺陷和涂层缺陷这给管道的安全运行埋下隐患即使部分投产验收合格的管道在运行过程中也难免受到介质、温度、疲劳、腐蚀、局部载荷等因素影响服役一段时间后产生缺陷或导致缺陷扩展并可能最终
10论文正文 管道履带式机器人.docx
前言油气管道输送是与铁路、公路、水运、航运并列的五大运输行业之一长输油气管道作为一种特殊设备广泛应用于石油、石化、化工等工业领域以及城市燃气系统中在国民经济中占有重要地位。随着“开发大西部”以及“西气东输”的战略指导方针长输油气管道的数量在不断增加。由于历史原因国内在役长输油气管道中部分管材制管质量较差加上施工建设过程中存在部分焊接缺陷和涂层缺陷这给管道的安全运行埋下隐患即使部分投产验收合格的管道在运行过程中也难免受到介质、温度、疲劳、腐蚀、局部载荷等因素影响服役一段时间后产生缺陷或导致缺陷扩展并可能最终